




 本文详细介绍了Ceres Solver中数值微分的方法,包括前向差分、中心差分以及Ridders方法。通过分析误差和效率,强调中心差分和Ridders方法在精度和鲁棒性上的优势,建议在无法使用解析或自动微分时,优先选择中心差分,若对精度有更高要求,则推荐Ridders方法。
本文详细介绍了Ceres Solver中数值微分的方法,包括前向差分、中心差分以及Ridders方法。通过分析误差和效率,强调中心差分和Ridders方法在精度和鲁棒性上的优势,建议在无法使用解析或自动微分时,优先选择中心差分,若对精度有更高要求,则推荐Ridders方法。
这篇文章翻译自官方教程Numeric derivatives并且参考了少年的此间的博客文章Ceres-Solver学习笔记(5)
利用analytic derivatives的另一个极端形式是 numeric derivatives,即数值微分法。数值微分法的关键是,目标函数
f(x)
f
(
x
)
的微分方程可以被写成一个极限形式:
前向差分
当然,在计算机上
h
h
使不可能无限逼近的,那就是选择一个非常小的
h
h
的值并近似导数
上面的公式是最简单的最基本的数值微分。它被称为 “正向差分公式”。
那么,如何在Ceres中实际构建一个数值微分算法过程的呢?主要可以分为两个步骤:
1. 定义Functor给定参数值,Ceres将通过它对给定的
(x,y)
(
x
,
y
)
的进行残值计算。
2. 用 NumericDiffCostFunction 来构造一个CostFunction 来封装整个实例。
这里我们仍然延用上一节解析微分算法中的例子。
y=b1(1+eb2−b3x)1/b4 y = b 1 ( 1 + e b 2 − b 3 x ) 1 / b 4
E(b1,b2,b3,b4)=∑if2(b1,b2,b3,b4;xi,yi)=∑i(b1(1+eb2−b3xi)1/b4−yi)2(1)(2) (1) E ( b 1 , b 2 , b 3 , b 4 ) = ∑ i f 2 ( b 1 , b 2 , b 3 , b 4 ; x i , y i ) (2) = ∑ i ( b 1 ( 1 + e b 2 − b 3 x i ) 1 / b 4 − y i ) 2
D1f(b1,b2,b3,b4;x,y)=1(1+eb2−b3x)1/b4(3) (3) D 1 f ( b 1 , b 2 , b 3 , b 4 ; x , y ) = 1 ( 1 + e b 2 − b 3 x ) 1 / b 4
具体代码如下:
struct Rat43CostFunctor {
Rat43CostFunctor(const double x, const double y) : x_(x), y_(y) {}
bool operator()(const double* parameters, double* residuals) const {
const double b1 = parameters[0];
const double b2 = parameters[1];
const double b3 = parameters[2];
const double b4 = parameters[3];
residuals[0] = b1 * pow(1.0 + exp(b2 - b3 * x_), -1.0 / b4) - y_;
return true;
}
const double x_;
const double y_;
//Analytic算法中手动求解Jacobians的部分被拿掉了。
}
CostFunction* cost_function =
new NumericDiffCostFunction<Rat43CostFunctor, FORWARD, 1, 4>(
new Rat43CostFunctor(x, y));这个生成微分的方法对于用户来说工作量最小。用户只需要关注残差计算是否正确和有效。这是第一步。
在进一步深入之前,我们需要先探讨一下前向查分的误差。我们在
x
x
点附近对进行泰勒展开。
我们用 O(h) O ( h ) 来表示误差,那么上式写作:
其中,
具体实现细节
在上面我们构建了一个Functor。现在我们用NumericDiffCostFunction 实现一种通用的方法(generic algorithm),对我们给定的Functor进行数值微分,这是第二步。虽然 NumericDiffCostFunction的实际实现是非常复杂的,但最终的结果是一个CostFunction,大致代码如下:
class Rat43NumericDiffForward : public SizedCostFunction<1,4> {
public:
Rat43NumericDiffForward(const Rat43Functor* functor) : functor_(functor) {} //构造函数
virtual ~Rat43NumericDiffForward(){} //析构函数
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
functor_(parameters[0], residuals);
//Functor中的()操作符重载使之成为了一个函数。在Evaluate函数中parameters是个二级指针,对应二维数组。但是在Functor中parameters是个指向double的指针数组。
if (!jacobians) return true;
double* jacobian = jacobians[0];
if (!jacobian) return true;
const double f = residuals[0];
//这里的residuals[0]来自于上面的functor_()。这里的f对应上面表达式的分子的第二项f(x)。
double parameters_plus_h[4];
for (int i = 0; i < 4; ++i) {
std::copy(parameters, parameters + 4, parameters_plus_h);
//把目前的Parameters[4]中的元素复制到parameters_plus_h[4]中。
const double kRelativeStepSize = 1e-6;
//相对步长系数。
const double h = std::abs(parameters[i]) * kRelativeStepSize;
//实际步长 = 参数值 * 相对步长系数。
parameters_plus_h[i] += h;
//加入h之后的参数
double f_plus;
functor_(parameters_plus_h, &f_plus);
//用functor_()计算f_plus。f_plus即上面表达式的分子的第一项f(x+h)。
jacobian[i] = (f_plus - f) / h;
//计算上面表达式,求得近似的微分值Df(x)。
}
return true;
}
private:
scoped_ptr<Rat43Functor> functor_; //作用域指针
};
std::copy(start, end, std::back_inserter(container));用于容器内容的拷贝。
例如:int a[3]={1,2,3}; int b[3]; std::copy(a,a+3,b);
注意在上面的代码中选择步骤大小的 h h ,不是一个绝对的步长大小,对于所有的参数都是相同的。我们使用相对步长大小,这比绝对步长给出了更好的导数估计。这个步长大小的选择只适用于不接近于零的参数值。因此,数字扩散函数的实际实现,使用一个更复杂的步长选择逻辑,在接近于零的地方,它切换到一个固定的步长。上述是一个简化的版本。
中心差分
O(h)
O
(
h
)
误差在前向差分公式中是可以的,但不是很好。一个更好的方法是使用中心差分公式:
值得注意的事,如果 f(x) f ( x ) 的值是已知的,那么前向差分公式只需要一次额外的计算,但是中心差分公式需要两次评估函数计算。使用中心差分的代价是它的两倍。那么,额外的计算真的值得吗?
为了回答这个问题,我们再次来计算中心差分公式中的近似误差:
中心差分公式的误差是
O(h2)
O
(
h
2
)
。这个误差是平方的,而前向差分公式中的误差只会呈线性下降。
在Ceres中,将前向差分转换为中心差分很简单:只需要将NumericDiffCostFunction模板参数中的FORWARD更改为CENTRAL。具体如下:
CostFunction* cost_function =
new NumericDiffCostFunction<Rat43CostFunctor, CENTRAL, 1, 4>(
new Rat43CostFunctor(x, y));
但是,这一点变化在实际中到底意味着什么呢?要搞清楚这个问题,让我们来考虑下面这个函数在
x=1.0
x
=
1.0
处的导数的问题
很容易可以求出此处的导数为 Df(1.0)=140.73773557129658 D f ( 1.0 ) = 140.73773557129658 利用这个值作为参考,我们可以计算并绘制出前向和中心差分公式的相对误差。这个相对误差是关于绝对步长值的函数。
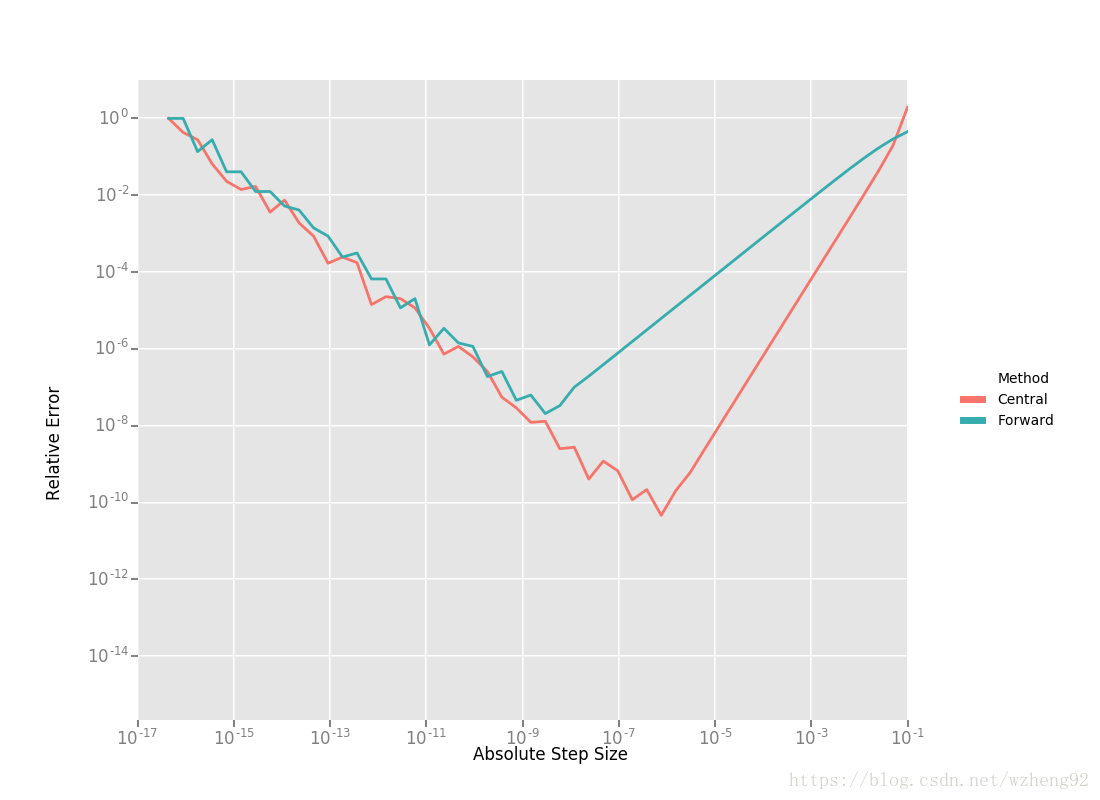
从右到左阅读图表,显而易见的:
- 这两种差分公式的图形都可以分成两个不同的区域。首先,从一个很大的h值开始,随着截断泰勒级数的影响,这个误差会下降,但是随着 h h 的值继续下降,这个误差开始再次增加,因为“舍入”的误差开始占据计算的主导地位。因此,我们不能继续通过降低的的方式,获得对 Df D f 更精确的估计。我们的近似运算变成了一个明显的限制因素。
- 前向差分并不是计算导数的一种很好的方法。中心微分公式收敛速度快得多,可以更精确地估计出步长的导数。因此,除非 f(x) f ( x ) 的评估函数运算非常复杂以至于中心差分公式无法负担,否则不要使用前向微分公式。
- 对于一个糟糕的 h h 值,这两个公式都不适用。
这里补充博客文章Ridders求导算法。文章对两种查分方式误差的对比分析写得更清晰。但是这篇文章对于Ridders算法 的介绍不太易懂。
Ridders方法
在上面两种差分方法,精度受到计算机浮点数精度的限制,也就是不能无限小。那么,我们能否得到更好的对
Df
D
f
的估计,而不需要如此小的
h
h
,以至于我们开始碰到浮点数的精度极限?
一种可能的方法是找到一种比快得多的方法。这可以通过运用 Richardson Extrapolation来解决微分问题。这也被称为Ridders的方法。
让我们回忆一下,中心差分公式中的误差。
这里要注意的是
K2
K
2
K4
K
4
……独立于
h
h
,只依赖于。
我们定义:
观察代入:
如果我们将步长减半,即令 h=h/2 h = h / 2 ,则得到另一个中心差分表达式:
如果我们将第二个表达式乘4然后和第一个表达式联立,可以得到一个新的关于 Df(x) D f ( x ) 的表达式,即
这是 Df(x) D f ( x ) 的新近似值,它的截断误差数量级是 O(h4) O ( h 4 ) 。我们将这一过程进行重复迭代,就可以得到下面的公式:
其中的参数 n n 可以理解为,包含了 Df(x) D f ( x ) 原始表达式的前 n n 项,这也就意味着误差等级为。原始公式的前 n n 项(如果)是包含 f f 相关项和相关项的,但它们都可以由之前计算出来的 A A 推到出来。根据这个公式可以知道依赖于 A(n−1,m+1) A ( n − 1 , m + 1 ) 和 A(n−1,m) A ( n − 1 , m ) 。我们可以把推到过程化成三角形表格如下:
因此,为了计算 A(n,1) A ( n , 1 ) 对增量 n n 的值,我们从左向右移动,一次计算一列。每次计算的花费即是两次评估函数的的计算量。计算 A(1,n) A ( 1 , n ) 的花费等于对步长大小为 21−nh 2 1 − n h 的中心差分的计算。
把这个方法应用到 f(x)=exsinx−x2 f ( x ) = e x sin x − x 2 ,从一个相当大的步长 h=0.01 h = 0.01 开始,我们得到:
相对于参考值 Df(1.0)=140.73773557129658 D f ( 1.0 ) = 140.73773557129658 , A(5,1) A ( 5 , 1 ) 的相对误差为 10−13 10 − 13 。比较而言,中央差分公式在相同的步长情况下 0.01/24=0.000625 0.01 / 2 4 = 0.000625 的相对误差是 10−5 10 − 5 。
A(5,1) A ( 5 , 1 ) 需要 A(4,2) A ( 4 , 2 ) , A(4,2) A ( 4 , 2 ) 需要 A(3,3) A ( 3 , 3 ) , A(3,3) A ( 3 , 3 ) 需要 A(2,4) A ( 2 , 4 ) , A(2,4) A ( 2 , 4 ) 需要 A(1,5) A ( 1 , 5 ) ,所以 A(5,1) A ( 5 , 1 ) 最终对应的中心差分步长是 h25−1 h 2 5 − 1
上述内容是针对“数值微分法”的Ridders方法基础。具体的实现是一种自适应模式,它跟踪自己的评估误差,并在达到所需的精度时自动停止。很明晰那,它比前向差分和中心差分公式需要更多计算,但也更加鲁棒和精确。在Ceres使用Ridders法很方便,只需要修改一下NumericDiffCostFunction的模板参数而已。
CostFunction* cost_function =
new NumericDiffCostFunction<Rat43CostFunctor, RIDDERS, 1, 4>(
new Rat43CostFunctor(x, y));下面的图表显示了使用这三种差分方法时,绝对步长大小与相对误差的关系。对于Ridders的方法,我们假设评估
A(n,1)
A
(
n
,
1
)
的对应步长为
21−nh
2
1
−
n
h
。
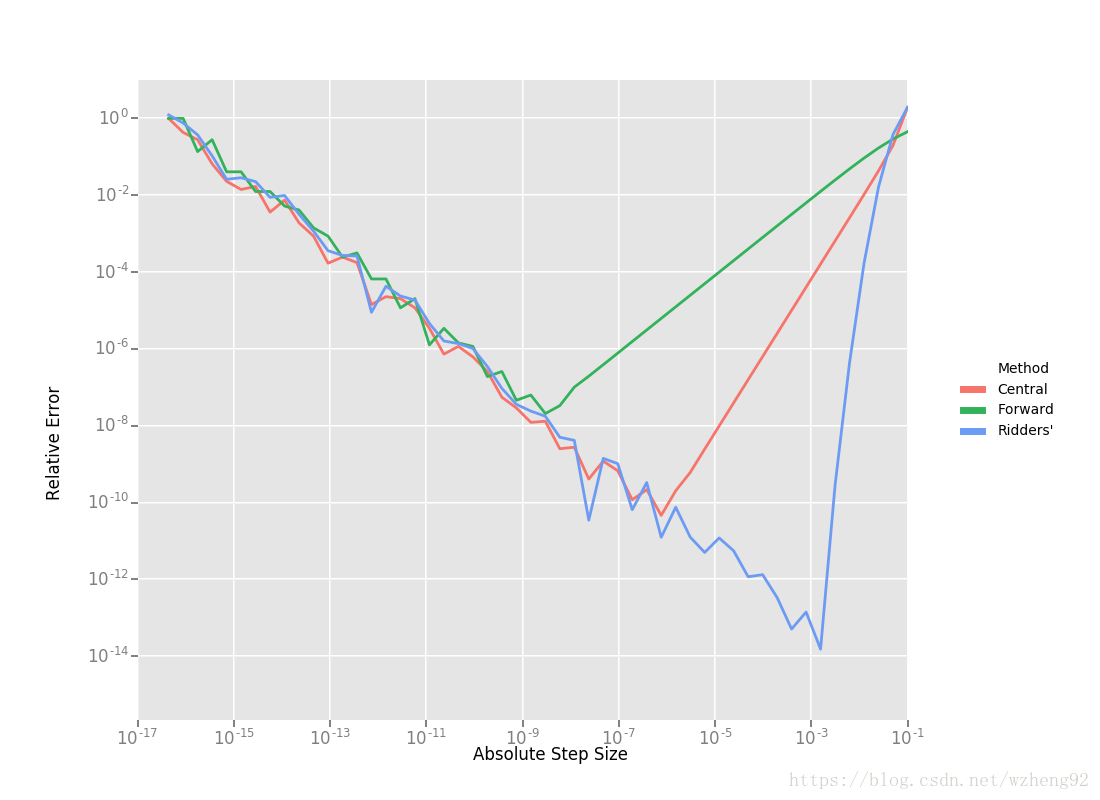
使用Ridders方法计算 A(5,1) A ( 5 , 1 ) 需要计算十次评估函数,对于 Df(1.0) D f ( 1.0 ) 我们的估算结果比中心差分估算好1000倍(不明白怎么比较的)。为了准确地计算这些数字,计算机的双精度浮点类型≈2.22×10−16。
回到Rat43(上面的曲线拟合问题),让我们对比使用数值微分算法的各种方法的运行效率。
| CostFunction | Time (ns) |
|---|---|
| Rat43Analytic | 255 |
| Rat43AnalyticOptimized | 92 |
| Rat43NumericDiffForward | 262 |
| Rat43NumericDiffCentral | 517 |
| Rat43NumericDiffRidders | 3760 |
正如预期的那样,中心差分的运行时间大约是前向差分的两倍,而Ridders方法的运行时间是前两者的好多倍,虽然它的精度也随之显著提高。
建议
当你不能通过分析微分法或自动微分法来计算微分时,就应该使用数值微分算法。通常情况下,这种情况出现在调用一个外部库或函数时。用户不知道它的解析形式,或者即使知道,也无法用 Automatic Derivatives的方式重写它。
当使用数字微分时,尽量使用中心差分法。如果求算时间无关紧要,或者无法为目标函数确定一个适宜的静态相对步长,那么建议Ridders方法。

















 4万+
4万+




 到【灌水乐园】发言
到【灌水乐园】发言







