




目录
5.通过catkin_make编译,roscore,rosrun运行
参考学习资料:赵虚左的ROS课程+古月的ROS机器人开发实践
ros—melodic vocode开发
一.话题通信机制
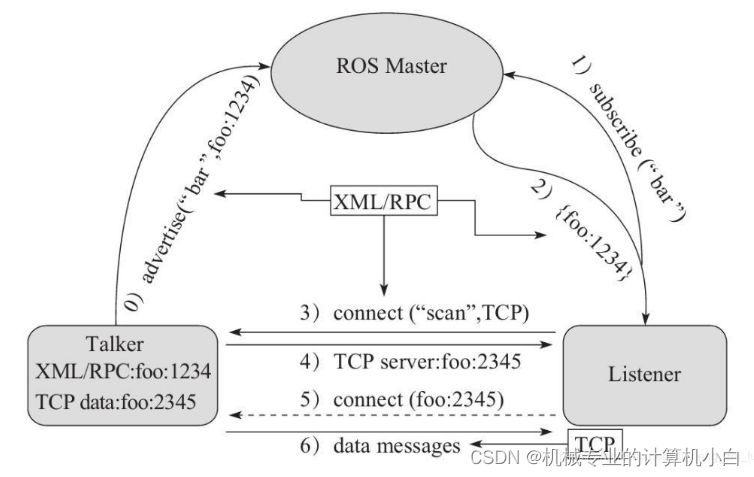
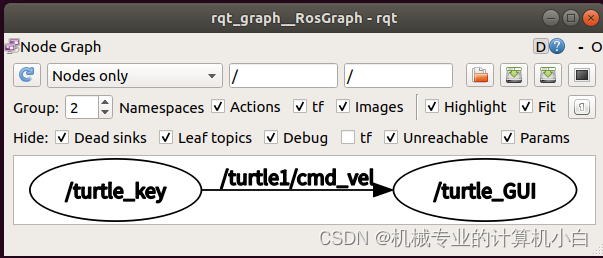
ROS Master通过roscore实现,故通过编程实现的是发布者、订阅者、和消息,如海龟的计算图。
二、话题通信c++实现
1.建立功能包
功能包的名字为sub_pub,在src中建立两个cpp文件。
2.c++发布者实现:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>头文件:
(1)调用ros库
(2)调用标准信息库中的字符串
(3)进行字符串拼接用到的string stream字符串流。
主函数:
int main(int argc, char *argv[])
{
setlocale(LC_ALL, "");
ros::init(argc,argv,"publisher");
ros::NodeHandle n;
ros::Publisher pub = n.advertise<std_msgs::String>("chongfu",1000);
std_msgs::String msg;
ros::Rate rate(10);
int count = 0;
while (ros::ok())
{
count++;
std::stringstream ss;
ss << "hello -->" << count;
msg.data = ss.str();
pub.publish(msg);
ROS_INFO("发布数据 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1996
1996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









