




 本文介绍了Canny边缘检测算法的步骤,包括高斯滤波降噪、计算梯度强度和方向、非极大值抑制、双阈值检测以及边缘检测的应用。通过实例分析了调整阈值对图像细节的影响,并展示了 Lena 图片和 Car 图片的边缘检测结果,揭示了参数调整对边缘检测效果的关键作用。
本文介绍了Canny边缘检测算法的步骤,包括高斯滤波降噪、计算梯度强度和方向、非极大值抑制、双阈值检测以及边缘检测的应用。通过实例分析了调整阈值对图像细节的影响,并展示了 Lena 图片和 Car 图片的边缘检测结果,揭示了参数调整对边缘检测效果的关键作用。
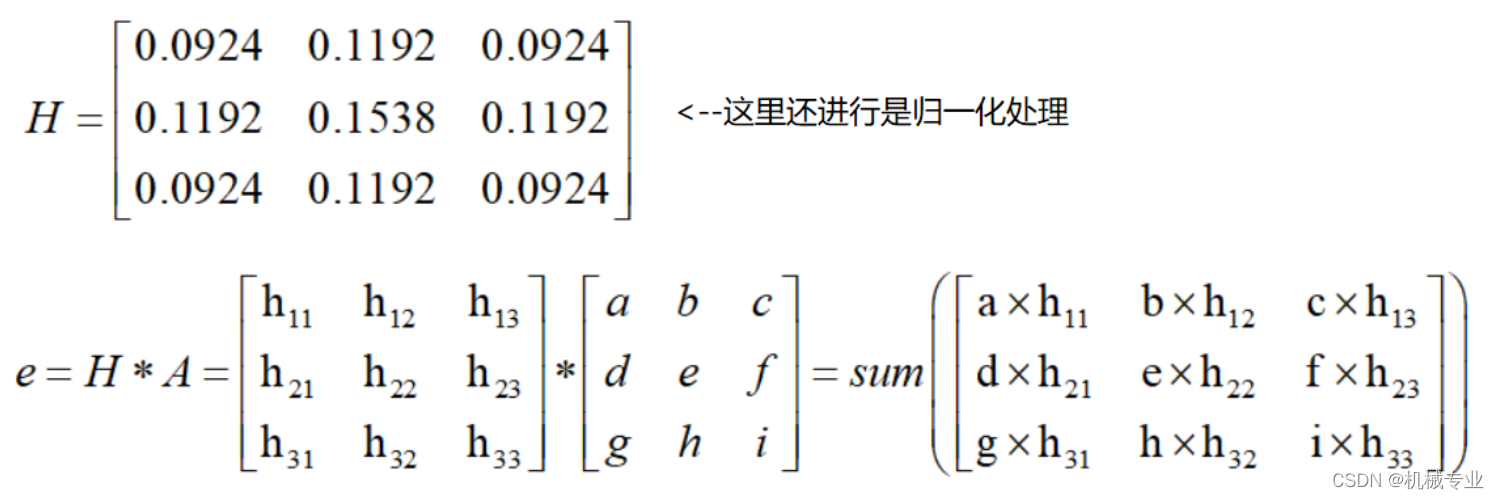
1.图像降噪(高斯滤波),因为Canny算子容易受噪声干扰,所以得找到合适的降噪处理以平滑图像,滤除噪声。
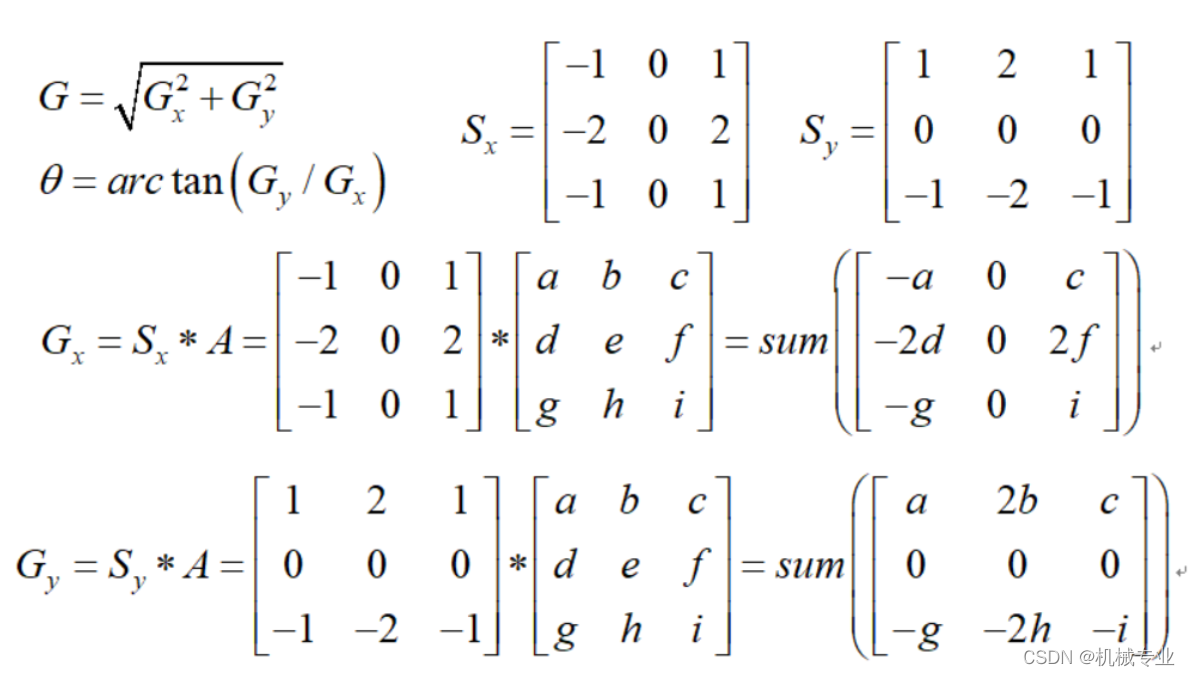
2.计算计算图像中每个像素点的梯度强度和方向。应用Sobel算子中的Gx和Gy计算梯度强度,方向通过Gx和Gy反三角函数计算出方向(平面问题:角度)。
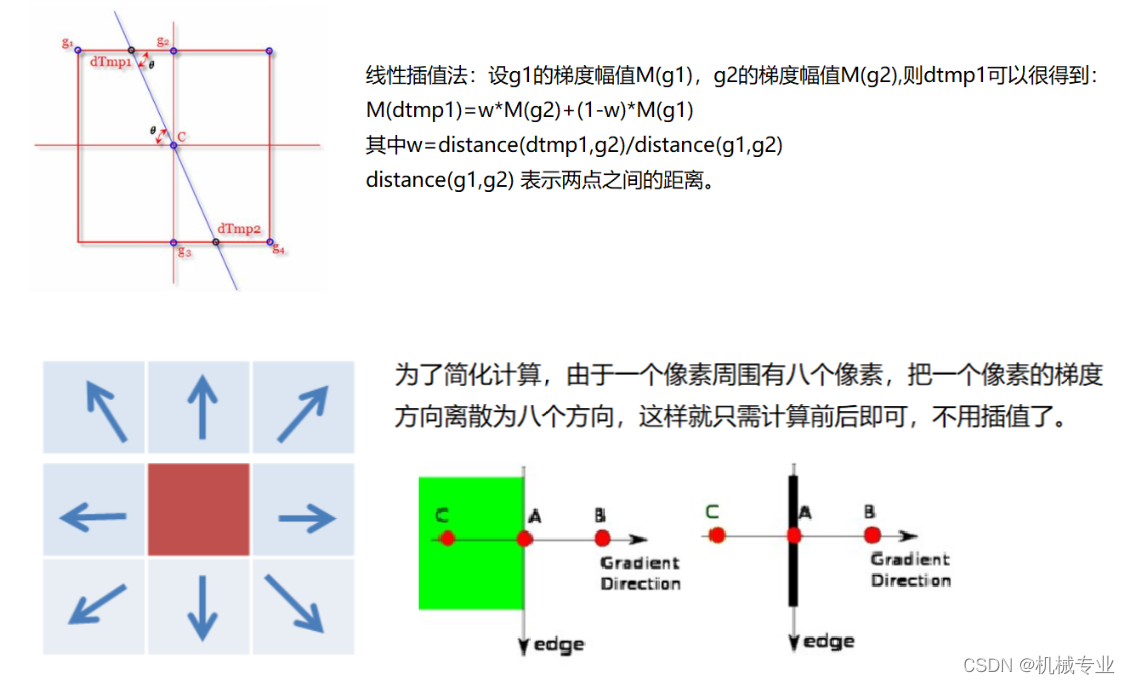
3.应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。范围内梯度最大的保存下来。
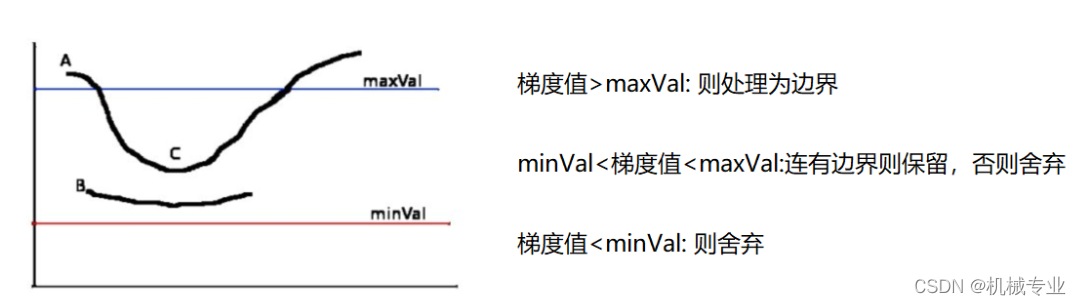
4.应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5.通过抑制孤立的弱边缘最终完成边缘检测。
1.高斯滤波
2.梯度强度和方向
3. 非极大值抑制
4.采用双阈值
import cv2 #opencv读取的格式是BGR
import numpy as np
import matplotl 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 490
490

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









