




GTSAM官方教程学习
0. 前言
年初完成了深蓝学院多传感器融合的课程,接触到因子图,作业中完成了基于ceres库的因子图构建,但存在cost不下降的问题。计划利用gtsam进行重写,开始学习记录。本文主要内容为gtsam官方教程的翻译,结合泡泡机器人公开课56,会在中间穿插自己的理解和应用。但为了记录自己的学习过程,有些理论性已经掌握的内容会稍微省略。
官方git:官方git(https://github.com/borglab/gtsam)
官方教程:官方教程(https://gtsam.org/tutorials/intro.html)
1. 因子图
1.1 序
因子图作为一种概率图模型,是将一个具有多变量的全局函数因子分解,得到几个局部函数的乘积,以此为基础得到的一个双向图叫做因子图。
在面试的过程中,有被问到因子图和位姿图的区别,当时有些懵,这里一起记录。
-
从BA开始说起,BA是SLAM和SFM定义出来的一个优化问题,以重投影误差为误差函数,以每个时刻位姿和所有路标点为优化变量,即将位姿和特征点一起优化。
-
位姿图优化在优化几次以后把特征点固定住不再优化,只当做位姿估计的约束,之后主要优化位姿。其节点是位姿,边为两个节点之间的相对运动。

- 因子图是一种概率图,是增量的处理后端优化。每加入一个点,对不需要重新计算的就直接用之前的中间结果,对需要重新计算的再去计算。其节点分为两种,位姿节点与因子节点。 总的来看,BA的计算量最大,需要将位姿与特征点同时优化。位姿图在其基础上减少了对特征点的优化。而因子图和二者区别在于“增量更新”这一点,在储存过去所有信息(会经过边缘化)的基础上并不需要对所有帧进行优化。
1.2 因子图
1.2.1 贝叶斯网络
将含有三个时间戳的隐马尔科夫模型的贝叶斯网络表示为例。
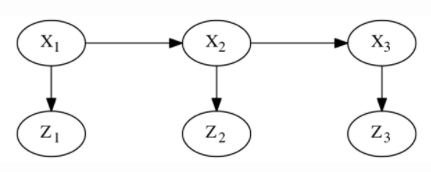
在该贝叶斯网络中,每个节点都和一个条件密度相关联。
- 顶层马尔科夫链展示了先验 P ( X 1 ) P(X_1) P(X1)、转移概率 P ( X 2 ∣ X 1 ) P(X_2 | X_1) P(X2∣X1)、 P ( X 3 ∣ X 2 ) P(X_3| X_2) P(X3∣X2)。
- 在这一过程中,每一帧的的观测量 Z t Z_t Zt 仅与当前时刻的状态量 X t X_t Xt有关,服从条件密度 P ( Z t ∣ X t ) P(Z_t|X_t) P(Zt∣Xt)。
- 给定一组测量值 z 1 , z 2 , z 3 z_1, z_2, z_3 z1,z2,z3,可以通过最大化后验概率来求得状态 X 1 , X 2 , X 3 X_1, X_2, X_3 X1,X2,X3。即 P ( X 1 , X 2 , X 3 ∣ Z 1 = z 1 , Z 2 = z 2 , Z 3 = z 3 ) P(X_1, X_2, X_3 | Z_1 = z_1, Z_2 = z_2, Z_3 = z_3) P(X1,X2,X3∣Z1=z1,Z2=z2,Z3=z3)
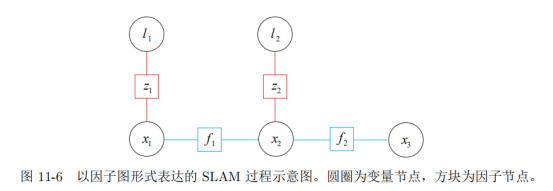
这里,观测量 Z t Z_t Zt是已知的,因此后验概率可以拆分为六个因子的乘积(和一个系数),即三个先验与三个似然因子1。这里定义 L ( X t ; z ) ∝ P ( Z t = z ∣ X t ) L(X_t ; z) \propto P(Z_t = z | X_t) L(Xt;z)∝P(Zt=z∣Xt)。
P ( X 1 , X 2 , X 3 ∣ Z 1 , Z 2 , Z 3 ) ∝ P ( X 1 ) P ( X 2 ∣ X 1 ) P ( X 3 ∣ X 2 ) L ( X 1 ; z 1 ) L ( X 2 ; z 2 ) L ( X 3 ; z 3 ) P\left(X_{1}, X_{2}, X_{3} \mid Z_{1}, Z_{2}, Z_{3}\right) \propto P\left(X_{1}\right) P\left(X_{2} \mid X_{1}\right) P\left(X_{3} \mid X_{2}\right) L\left(X_{1} ; z_{1}\right) L\left(X_{2} ; z_{2}\right) L\left(X 3 ; z_{3}\right) P(X1,X2,X3∣Z1,Z2,Z3)∝P(X1)P
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2028
2028

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









