



重新思考介入性磁共振成像
介入性磁共振成像简介
磁共振成像(MRI)无与伦比的软组织对比度和优异的图像质量使其成为首选的成像方式,尤其是在神经学和肿瘤学应用中。所获得的MRI图像通常被用作手术规划的相关术前图像,或在手术室中作为显示器上的视觉参考。
用于治疗引导或手术监测的MRI系统很少见。手术室中的标准成像系统通常是X射线、超声(US)或内窥镜(视频),用于执行患者监测、控制和设备导航功能。
将这些术前MRI图像用于治疗目的时,通常还需要与手术室中的可用影像数据进行融合。这可以通过以下方式实现:
完全不做,或仅在临床医生脑海中进行,即所谓的认知融合。这需要经验和培训,且会导致不准确、主观性、变异性以及缺乏可重复性。1 也可通过或多或少精确且复杂的专用软件工具,结合光学和/或电磁设备追踪系统来实现。1–4
对于基于软件的图像共配准融合,图像需手动或半自动地相互配准。术前MRI图像——顾名思义——是在手术前采集的,但有时甚至是在与手术台曲率不同的床面上,或在不同的患者体位下获取的。
例如,在进行前列腺MRI时,成像通常是在患者保持笔直的仰卧位下完成的,而实际的活检或治疗则是在患者俯卧或仰卧且双腿向躯干弯曲的体位下进行的。
对于乳腺MRI,患者通常处于抬高的俯卧位,而手术则在仰卧位或侧卧位的手术台上进行。您很容易意识到,使用这些术前MRI图像与治疗室或手术室内现有的成像方式实现精确图像融合所面临的困难。
对于这两种手术程序,在传统的水平场MRI系统中剩余空间相对较小,无法为外科医生或较长的器械提供足够的操作空间,特别是当这些器械与患者身体垂直时。
以这种方式也无法实现真正的精确定位配准(超声到MRI),通常图像配准误差在3–7毫米范围内,若缺乏解剖标记结构,误差有时甚至显著更大。这对于使用额外成像系统的实际治疗或粗略定位可能足够,但对于组织活检及其他对微小结构的精确治疗而言则误差过大。通过调整磁共振成像位置以匹配实际手术位置,可将误差减小至2–3毫米。5
使用实时MRI作为术中或介入治疗(例如,活检和前列腺癌治疗、肝脏激光消融/射频消融/冷冻消融、脑部介入手术)的导航设备可能非常有益,并且显然可以消除或大幅减少这些配准误差。
这要求治疗操作在MRI检查室中进行,或在专用手术室内放置MRI系统。
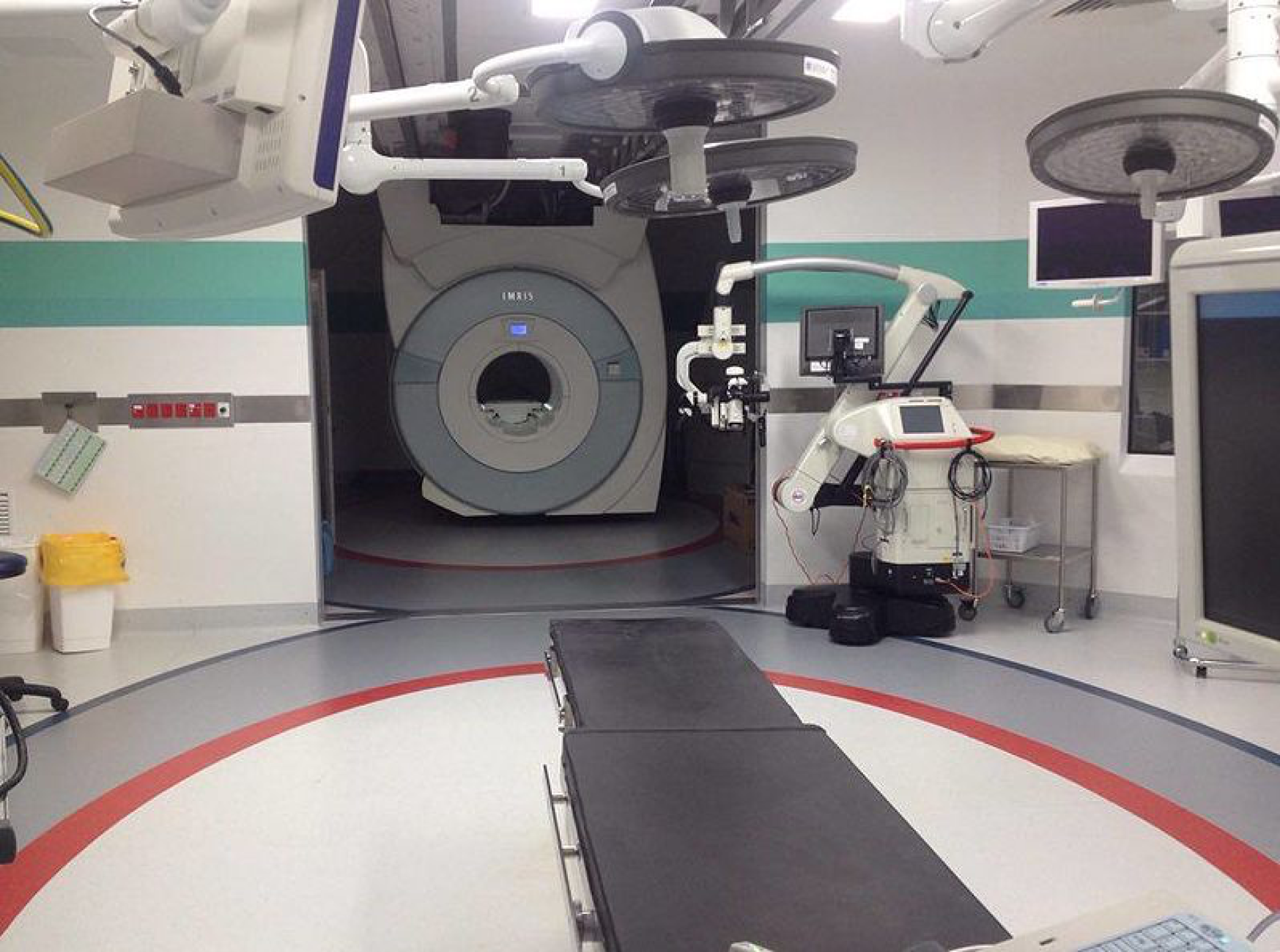
后者是一种已被多家医疗机构探索过的方案,但需要极高的投资且需要技能水平非常高的跨学科人员(图1和图2)。这些系统非常适合致力于研究影像引导技术以开发先进治疗技术的科研机构,但目前对绝大多数临床医疗服务提供者而言并不可行。
常规诊断MRI用于介入治疗
传统水平场超导磁体中患者通路困难,以及需要特殊的无磁性治疗工具,也阻碍了常规诊断MRI系统在 “偶尔”介入应用中的广泛使用。
这意味着,原本主要用于诊断成像的MRI系统也被用于某些简单的活检或穿刺抽吸手术程序。但即使是这些相对简单的介入治疗,也需要使用对患者安全(磁共振安全)且不会引起显著成像伪影(磁共振兼容)的特殊工具。
典型的伪影是由器械材料的磁化率引起的,这可能导致器械显示的直径显著增加。在高场强MRI系统中,一根磁共振成像兼容的穿刺针实际直径仅为2 mm,但可能显示为10 mm或更大。显然,在存在此类伪影的情况下,对较小结构进行准确引导和安全放置将非常困难,有时甚至无法实现。
任何在MRI磁体内部或附近使用的外部系统都会暴露于强磁场中,因此必须确保这些设备不会被吸入磁体孔径中。此外,MRI的强电磁场也可能导致系统故障或患者安全问题。但如果未进行适当屏蔽,设备本身也会影响MRI的性能。需要考虑的因素很多。
介入和治疗用途的磁共振成像在过去20+年中一直采用传统标准高场系统,并添加或多或少复杂且昂贵的组件。2
例如,已提出使用MRI兼容机器人系统,结合特殊屏蔽的室内监视器、专用的镍钛合金或塑料器械(具有无或极少磁化率相关成像伪影)以及室内光学追踪系统,以解决患者通路问题。3这些组件成本相当高,且由于磁共振成像孔径内空间狭小以及手术无菌方面的问题,可能的治疗手段仍然受限。


即使是最新一代磁共振成像设备的短孔径磁体,也需要使用机器人系统。由于磁体长度为1.20米,距离磁体中心仍有60厘米(约一臂长),而孔径直径为70厘米——当中等体型患者位于其中时,治疗工具可用的垂直空间仅有10–15厘米(图3)。
开放式垂直磁场磁体确实为介入手术提供了一些优势,但通常其磁场强度仅为0.2 T至0.4 T,目前仅有一套系统超过1 T,另一套为1 T的系统却遗憾地已被淘汰(图2)。较低的场强会导致采集时间增加,不利于治疗应用,且图像质量较低。另一方面,较低的场强也能减少磁化率伪影,并具有显著降低的磁吸引力,从而使手术整体上更安全。然而,作者们认为,低场强系统可以成为更简便、专用手术程序的理想基础,尤其是在术前高场强和高质量磁共振图像被用作图像融合的基础。
高场强磁共振成像与室内超声
高场强磁共振成像系统中患者通路的困难引发了一个问题:是否应通过在磁共振成像室内将磁共振成像与超声结合来重新思考介入性磁共振成像手术程序?对于许多手术程序而言,超声引导是金标准,若能辅以近实时磁共振引导和成像,将获益匪浅。5,6
总体思路是获取感兴趣区域全面且高质量的磁共振成像图像,然后将患者连同磁共振患者床一起移出狭窄的磁共振孔洞,接着在超声引导下继续进行治疗。如需进一步的磁共振成像图像或更新图像,可将患者重新移回MRI系统中。在器械放置过程中,可能需要多次重复此步骤,以确保目标位置已达到目标,且应在手术结束时进行,以记录治疗结果用于质量保证。磁共振成像更能清晰显示治疗区域的细节,并展示手术效果。
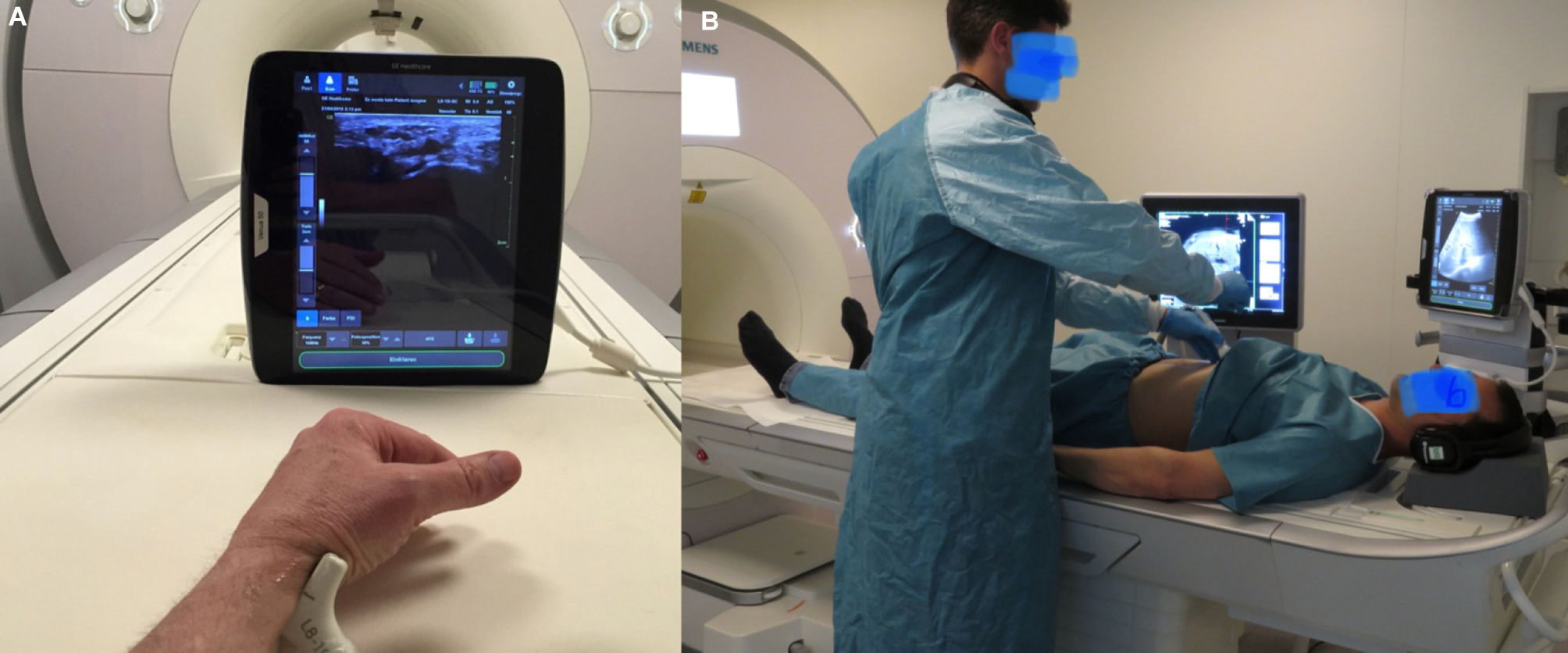
磁共振成像和超声的图像可以进行认知融合(图4B),7或通过特殊的跟踪和导航技术自动配准并叠加到刚获得的磁共振成像图像上(图5)。理论上,几种 commercially available 超声系统甚至可以在距离3 特斯拉磁体开口仅1米的位置使用(图4A)。
尽管这些系统没有正式的MRI安全标签,也未经过在MRI成像室中使用的测试和批准,但我们这样的研究机构已在模型设置中使用这些系统,以重新思考介入性 MRI手术。我们所使用的超声系统(GE Venue 50)与商用3T MRI(西门子Skyra)配合使用时,曾自行关闭过一次——它被移动到过于靠近磁场的位置——大约在25 毫特斯拉处——但即使在50 毫特斯拉的磁力线位置,我们也没有遇到明显的磁吸引力。
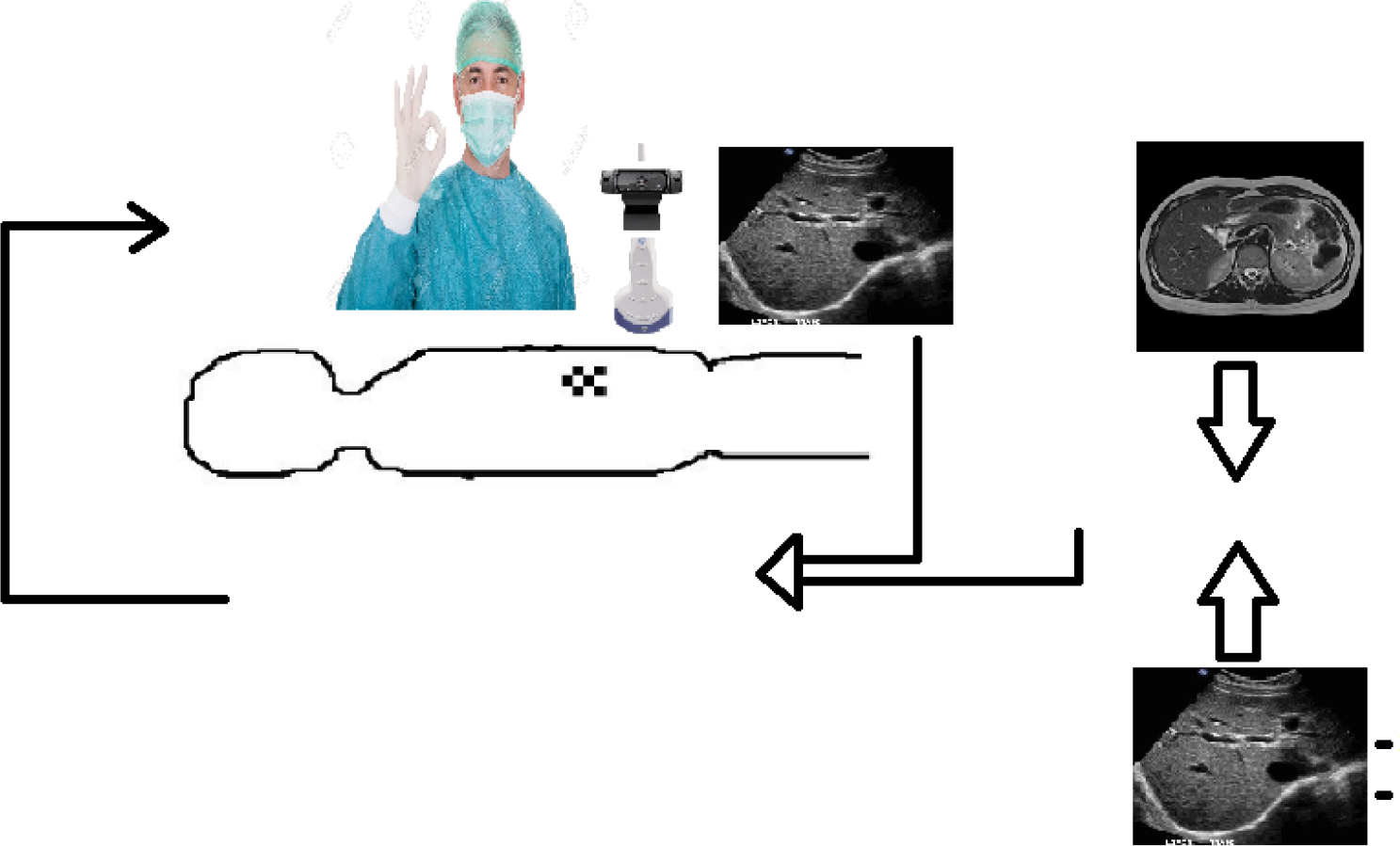
相较于使用磁共振成像图像和实时超声图像进行认知融合,一种更精确的替代方法是采用基于标记的方法,并结合安装在超声探头上的导航系统。该标记例如为磁共振可见组件(如维生素B药片)和光学标记的组合,可实现将实时超声与刚获取的磁共振成像图像进行配准。8,9与通常使用的外部‐内部光学跟踪系统相比,该方法的优势在于摄像头与标记之间的视线被遮挡的问题不存在或很小,且成本较低、易于使用。
缺点是视野相对较小,但由于手术区域已知且范围有限,这一缺点可能并不显著。
 某大型诊断成像供应商的平板超声设备放置在另一家大型成像供应商的3T MRI设备仅1米远的位置。该超 声系统并未获得在MRI检查室内使用的批准和认证,但在超声引导下直接应用可能为在MRI检查室内开展介入和治疗性操作带来新的推动。(B) 在独立显示器上 进行MRI和超声图像的认知融合。缩略词: MRI,磁共振成像;US,超声。)
某大型诊断成像供应商的平板超声设备放置在另一家大型成像供应商的3T MRI设备仅1米远的位置。该超 声系统并未获得在MRI检查室内使用的批准和认证,但在超声引导下直接应用可能为在MRI检查室内开展介入和治疗性操作带来新的推动。(B) 在独立显示器上 进行MRI和超声图像的认知融合。缩略词: MRI,磁共振成像;US,超声。)
低成本介入性磁共振成像固定臂
在磁共振患者床上进行外部干预时,可能需要在操作过程中额外进行磁共振扫描以进行验证或监测,这反过来要求治疗设备在患者重新移入磁共振磁体时保持固定位置。理想情况下,应使用完全磁共振成像兼容的固定臂来实现这一目标,该固定臂为纯机械结构,并由非铁质甚至塑料材料制成,以避免任何磁性吸引力,并确保固定臂既不受磁共振成像影响,也不会对磁共振成像产生负面影响,同时为患者维持安全的治疗设置。
我们开发并使用塑料材料3D打印了一种全新的模块化固定臂概念,该固定臂具有7个自由度,可安装在磁共振检查床护栏上,并可根据手术需求和患者体型进行调整(图6)。
一次初步的磁共振成像扫描将提供用于穿刺路径规划的初始目标位置信息,以及超声融合所需的基线扫描。根据复杂程度,可能需要进行快速磁共振扫描以确认已到达目标位置,并在手术结束时再进行一次扫描,以检查和记录治疗结果(质量保证)。
讨论与结论
磁共振/超声融合并行联合使用,将磁共振成像的优异对比度和细节与超声的实时高分辨率设备引导相结合,使介入空间从磁共振成像设备内部转移到磁共振检查床上。
将先进的高场强磁共振成像与相对低成本的超声相结合,可提供卓越的基线图像质量,并配备快速且易于使用的引导用成像系统。
MRI/超声融合已由多家供应商提供用于前列腺活检应用。然而,这些系统通常将术前MRI图像与实时超声进行融合。由于成像时患者体位不同而产生的配准误差可能达到7毫米。
所提出的设置表明,使用超声系统作为介入性 MRI手术的主要引导和监测设备是可行的。为了避免认知融合的局限性以及传统光学追踪系统的成本和复杂性,我们建议采用一种由内向外跟踪方法,将安装在超声探头摄像头上的立体相机系统与患者体表的 MRI和超声可见标记相结合,实现MRI和超声图像的融合。显然,使用此方法时,该手术程序更应称为 “介入性超声/磁共振融合手术”。
为了使该操作在偶尔将MRI系统用作介入和治疗引导系统时可行,所有相关组件都需要相对便宜、易于使用且易于拆除,同时为患者和外科医生提供最大程度的安全保障。
为此,我们建议额外使用一种小巧且极为灵活的固定臂,该固定臂可为外科医生提供支持并同时承载治疗设备在手术过程中可保持原位以进行额外的磁共振成像扫描。该固定臂可在<1分钟内完成安装和拆卸。超声系统可在<1分钟内移动至磁共振成像检查床末端(并返回),且安装在超声探头上的导航摄像头始终可用。标记设置和配准过程所需时间仍相对较长,但近期完全有望实现自动化并加快速度。
由于大多数MRI系统几乎仅用于诊断用途,这种易于安装和拆卸的系统甚至对那些仅进行少量介入性或治疗性磁共振成像手术的机构也具有吸引力。此外,它特别适用于一些较为简单和一些更为复杂的介入性 MRI手术(图7 – 绿色和橙色感叹号)。
复杂的心脏或神经外科手术需要配备安装或可使用的磁共振成像设备的专用手术室(图1)。
我们评估了所提出的介入性磁共振成像设置,包括传统的封闭式高场强磁共振成像(图3)、专用的介入式磁共振成像手术室(图1)和垂直场磁共振成像(图2),并与建议的介入性超声/磁共振成像融合手术设置(图4–6)进行了比较,评估指标包括患者通路、外科医生舒适度、实时成像和治疗引导,以及总成本,适用于简单和先进治疗技术的手术程序(图7)。
研究结果如表1所示,表明介入式超声/磁共振成像融合手术装置对于除较复杂的手术程序外的所有手术程序均具有潜在优势。
使用磁共振成像兼容且经批准的超声系统,以及易于使用且成本低廉的附件,介入性磁共振成像也可能成为其他临床应用的有吸引力的选择。
如果介入手术由超声系统引导,则不再需要磁共振成像兼容的室内显示器。由于超声和磁共振成像不会同时使用,因此几乎不会出现与超声相关的磁共振成像伪影。仅室内显示器的成本很可能就接近本文所述设备的总成本。
本文无法对所述设置的潜在优势进行基于患者和操作的全面评估研究,因为目前市场上尚无磁共振成像兼容且磁共振成像安全的超声系统,且所介绍的固定臂和追踪方法尚未获得临床认证。本文所述观点的目的是帮助研究人员重新思考介入性磁共振成像当前的技术组件研究。
我们希望有更多的研究和行业团队能够认同这一重新思考,并助力进一步开发可用于即将进行的临床验证的手术程序、工具和设备。

| 介入磁共振成像问题 | 标准诊断型磁共振成像 – 水平磁场(图3) | 标准诊断磁共振成像 – 垂直磁场 (图2) | 室内超声融合 新增(图4/5) | 专用介入 MRI检查室(图1) |
|---|---|---|---|---|
| 治疗师的患者通路 | 通常为70厘米直径且 >60厘米至MRI中心——对外科医生来说非常困难到达手术目标。 | 通常为45厘米垂直高度开启和约50 cm到MRI中心,患者通路 >240度。 | 治疗期间的完整患者通路。 | 治疗期间的完整患者通路。 |
| 外科医生舒适性 | 外科医生必须以坐姿或弯腰的姿势将手伸入磁体孔径中。 | 外科医生通常可以坐着靠近磁体孔径但仍需伸手进入磁体孔径内。 | 外科医生可以正常地站在患者旁边站立位置。 | 外科医生可以站在患者旁边,处于正常的站立位置。 |
| 实时治疗引导 | 只有磁共振成像可用引导——快速成像是低分辨率;高质量成像是缓慢的。 | 只有磁共振成像可用于引导——快速成像是低分辨率;高质量成像是慢的。大多数垂直场系统是低场(然后 –)。 | 超声提供实时成像给先前的获得了高质量的磁共振成像。图像和系统融合结合了高质量成像与实时成像,用于治疗引导。 | 介入式MRI套件附带额外的实时成像功能,形式为X射线和/或超声。 |
| 间质疗法(图7中的绿色“!”) | 设置可用于局限性较小,便于手术程序。非常有限空间和减少的手术部位。 | 由于更好的患者通路和更好的手术部位视野。 | 出色的患者通路与实时结合‐影像引导和磁体孔径内无空间限制。 | 患者通路极佳,与实时结合影像引导且无磁体孔径内的空间限制。 |
| 更先进的疗法(图7中的橙色和红色“!”) | 磁共振成像未安装在真实环境中手术室。无菌和气流不可接受复杂开放手术并且仅有有限的监测和支持设备可用。不适用于复杂的外科手术。 | 磁共振成像未安装在真正的手术室中。无菌和气流不可接受于复杂开放手术,且仅有有限的监测和支持设备可用。不可行用于复杂的外科手术手术程序。 | 磁共振成像未安装在真正的手术室内。无菌性和气流不符合要求复杂开放手术,但已足够用于需要实时治疗引导的治疗。 | 磁共振成像安装在真实手术室和来配备所有现有设备先进的手术设置。 |
| 介入性磁共振成像的设置成本 | 手术程序:基线是传统的1.5特斯拉诊断用磁共振成像与一个水平磁场。 | 磁共振成像成本另加5万欧元至15万欧元用于介入性磁共振成像套餐由磁共振成像兼容的室内显示器,专用非磁性治疗工具,麻醉与监测设备和操作设备。 | 磁共振成像成本加上介入套餐加上5万欧元用于超声和跟踪硬件和软件。 | 建造费用/施工以及附加设备的费用非常高(>> 100万欧元)——这也是为什么此类系统目前数量很少的原因全球已安装。 |
备注: 此类配置的额外成本也进行了粗略评估。表格评估始终基于特定项目可能的最佳选项(例如,治疗操作中患者通路最开放的情况是患者位于可自由接近的床上,这为“室内超声融合”概念和“专用介入磁共振成像”给出“+”)。其中,“0”表示可行/可以接受,“–”表示不可行,“+”表示可行,“++”/“– –”表示极佳/禁止。缩略词: MRI,磁共振成像;iMRI,介入性磁共振成像;US,超声。

















 1714
1714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









