







学习STM32平衡小车第三天
相关介绍:
MPU6050原理详解及实例应用 - 程序员大本营 (pianshen.com)
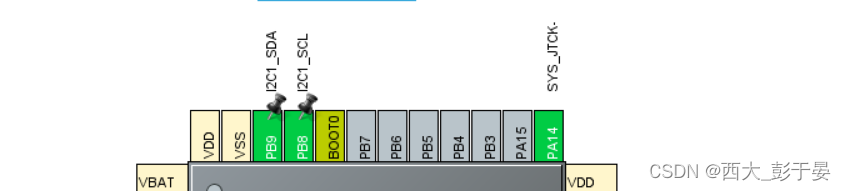
1、配置引脚
SDA-->PB9
SDL-->PB10


初始化MPU函数:
MPU_Init();
mpu_dmp_init();定义参数和缓存变量数组:
float pitch,roll,yaw;
uint8_t display_buf[20];
相关介绍:
MPU6050原理详解及实例应用 - 程序员大本营 (pianshen.com)
SDA-->PB9
SDL-->PB10
初始化MPU函数:
MPU_Init();
mpu_dmp_init();定义参数和缓存变量数组:
float pitch,roll,yaw;
uint8_t display_buf[20];
 2621
1512
15万+
2621
1512
15万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























