






学习出处:
1、基于Kinect v2+PCL的模型奶牛重建(上)——数据获取_3d 重建奶牛-优快云博客

#define vtkRenderingCore_AUTOINIT 4(vtkInteractionStyle,vtkRenderingFreeType,vtkRenderingFreeType,vtkRenderingOpenGL)
#define vtkRenderingVolume_AUTOINIT 1(vtkRenderingVolumeOpenGL)
#include <Windows.h>
#include <iostream>
#include <kinect.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/io/pcd_io.h> //PCL的PCD格式文件的输入输出头文件
#include <pcl/point_types.h> //PCL对各种格式的点的支持头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/registration/icp.h> //ICP(iterative closest point)配准
#include <pcl/console/parse.h> //pcl控制台解析
//kd树
#include <pcl/kdtree/kdtree_flann.h>
//特征提取
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/normal_3d.h>
//重构
#include <pcl/surface/gp3.h>
#include <pcl/surface/poisson.h>
#include <boost/thread/thread.hpp>
#include <string.h>
using namespace cv;
using namespace std;
typedef pcl::PointXYZ MyPointDataType;
// 安全释放指针
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{
if (pInterfaceToRelease != NULL)
{
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
string num2str(int i)
{
stringstream ss;
ss << i;
return ss.str();
}
const string targetFolderPath = "C:\\A0fangfang\\shiyan\\8.19\\";
int main()
{
// 获取Kinect设备
IKinectSensor* m_pKinectSensor;
HRESULT hr;
hr = GetDefaultKinectSensor(&m_pKinectSensor);
if (FAILED(hr))
{
return hr;
}
IMultiSourceFrameReader* m_pMultiFrameReader;
if (m_pKinectSensor)
{
hr = m_pKinectSensor->Open();
if (SUCCEEDED(hr))
{
// 获取多数据源到读取器
hr = m_pKinectSensor->OpenMultiSourceFrameReader(
//FrameSourceTypes::FrameSourceTypes_Color |
//FrameSourceTypes::FrameSourceTypes_Infrared |
FrameSourceTypes::FrameSourceTypes_Depth,
&m_pMultiFrameReader);
}
}
if (!m_pKinectSensor || FAILED(hr))
{
return E_FAIL;
}
UINT16 *depthData = new UINT16[424 * 512];//用于存储深度图数据
Mat i_rgb(1080, 1920, CV_8UC4);
Mat i_depthWrite(424, 512, CV_16UC1);
UINT nColorBufferSize = 1920 * 1080 * 4;
// 三个数据帧及引用
IDepthFrameReference* m_pDepthFrameReference = nullptr;
IColorFrameReference* m_pColorFrameReference = nullptr;
IDepthFrame* m_pDepthFrame = nullptr;
IColorFrame* m_pColorFrame = nullptr;
IMultiSourceFrame* m_pMultiFrame = nullptr;
ICoordinateMapper* m_pCoordinateMapper = nullptr;
int count = 0;
while (count <= 30)
{
Sleep(5000);
while (true)
{
// 获取新的一个多源数据帧
hr = m_pMultiFrameReader->AcquireLatestFrame(&m_pMultiFrame);
if (FAILED(hr) || !m_pMultiFrame)
{
continue;
}
break;
}
// 从多源数据帧中分离出彩色数据,深度数据
if (SUCCEEDED(hr))
hr = m_pMultiFrame->get_DepthFrameReference(&m_pDepthFrameReference);
if (SUCCEEDED(hr))
hr = m_pDepthFrameReference->AcquireFrame(&m_pDepthFrame);
//if (SUCCEEDED(hr))
// hr = m_pMultiFrame->get_ColorFrameReference(&m_pColorFrameReference);
//if (SUCCEEDED(hr))
// hr = m_pColorFrameReference->AcquireFrame(&m_pColorFrame);
hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);
//if (SUCCEEDED(hr))
// hr = m_pColorFrame->CopyConvertedFrameDataToArray(nColorBufferSize, i_rgb.data, ColorImageFormat::ColorImageFormat_Bgra);
// 定义相关变量
pcl::PointCloud<MyPointDataType>::Ptr cloud(new pcl::PointCloud<MyPointDataType>);
pcl::PointCloud<MyPointDataType>::Ptr cloud_filtered(new pcl::PointCloud<MyPointDataType>);
//初始化点云数据PCD文件头
cloud->width = 512 * 424;
cloud->height = 1;
cloud->is_dense = false;
cloud->points.resize(cloud->width * cloud->height);
if (SUCCEEDED(hr))
{
hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, depthData);
/*hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, reinterpret_cast<UINT16*>(i_depthWrite.data));
imwrite("depth_" + num2str(count) + ".png", i_depthWrite);*/
CameraSpacePoint* m_pCameraCoordinates = new CameraSpacePoint[512 * 424];
hr = m_pCoordinateMapper->MapDepthFrameToCameraSpace(512 * 424, depthData, 512 * 424, m_pCameraCoordinates);
//ColorSpacePoint* m_pColorCoordinates = new ColorSpacePoint[512 * 424];
//hr = m_pCoordinateMapper->MapDepthFrameToColorSpace(512 * 424, depthData, 512 * 424, m_pColorCoordinates);
for (int i = 0; i < 512 * 424; i++)
{
//------写入RGB------
/*ColorSpacePoint colorP = m_pColorCoordinates[i];
if (colorP.X != -std::numeric_limits<float>::infinity() && colorP.Y != -std::numeric_limits<float>::infinity())
{
int colorX = static_cast<int>(colorP.X + 0.5f);
int colorY = static_cast<int>(colorP.Y + 0.5f);
if ((colorX >= 0 && colorX < 1920) && (colorY >= 0 && colorY < 1080))
{
cloud->points[i].b = i_rgb.data[(colorY * 1920 + colorX) * 4];
cloud->points[i].g = i_rgb.data[(colorY * 1920 + colorX) * 4 + 1];
cloud->points[i].r = i_rgb.data[(colorY * 1920 + colorX) * 4 + 2];
}
}*/
//------写入XYZ------
CameraSpacePoint cameraP = m_pCameraCoordinates[i];
if (cameraP.X != -std::numeric_limits<float>::infinity() && cameraP.Y != -std::numeric_limits<float>::infinity() && cameraP.Z != -std::numeric_limits<float>::infinity())
{
float cameraX = static_cast<float>(cameraP.X);
float cameraY = static_cast<float>(cameraP.Y);
float cameraZ = static_cast<float>(cameraP.Z);
cloud->points[i].x = cameraX;
cloud->points[i].y = cameraY;
cloud->points[i].z = cameraZ;
}
}
}
//-----------------------提取范围内的点------------------------
pcl::ConditionAnd<MyPointDataType>::Ptr range_cond(new pcl::ConditionAnd<MyPointDataType>());
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::GT, 0.001)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("z", pcl::ComparisonOps::LT, 2.0)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::GT, -0.5)));
range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("x", pcl::ComparisonOps::LT, 0.5)));
//range_cond->addComparison(pcl::FieldComparison<MyPointDataType>::ConstPtr(new pcl::FieldComparison<MyPointDataType>("y", pcl::ComparisonOps::GT, -0.85)));
pcl::ConditionalRemoval<MyPointDataType> condrem(range_cond, false);
condrem.setInputCloud(cloud);
condrem.setKeepOrganized(false);
condrem.filter(*cloud_filtered);
//--------------------------------------------------------------
//-----------------------去除离群点------------------------
//pcl::RadiusOutlierRemoval<MyPointDataType> outrem;
//outrem.setInputCloud(cloud_filtered);
//outrem.setRadiusSearch(0.03);
//outrem.setMinNeighborsInRadius(15);
//outrem.filter(*cloud_filtered);
//pcl::StatisticalOutlierRemoval<MyPointDataType> sor;
//sor.setInputCloud(cloud_filtered);
//sor.setMeanK(10);
//sor.setStddevMulThresh(1.0);
//sor.filter(*cloud_filtered);
//--------------------------------------------------------------
string s = targetFolderPath + "cow"; // 在文件名前加上目标文件夹路径
s += num2str(count);
s += ".pcd";
pcl::io::savePCDFile(s, *cloud_filtered, false); // 将点云保存到PCD文件中//将点云保存到PCD文件中
std::cerr << "Saved " << cloud_filtered->points.size() << " data points." << std::endl;
s.clear();
//Beep(1046, 1000);
// 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D viewer"));
viewer->addPointCloud(cloud_filtered);
viewer->resetCamera();
viewer->addCoordinateSystem(0.1);
viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spinOnce();
}
count++;
cout << "test" << endl;
// 释放资源
SafeRelease(m_pDepthFrame);
SafeRelease(m_pDepthFrameReference);
SafeRelease(m_pColorFrame);
SafeRelease(m_pColorFrameReference);
SafeRelease(m_pMultiFrame);
}
// 关闭窗口,设备
m_pKinectSensor->Close();
SafeRelease(m_pKinectSensor);
std::system("pause");
return 0;
}2、基于Kinect v2+PCL的模型奶牛重建(中)——地面去除与法向量计算_pcl计算地面法向量-优快云博客
#define vtkRenderingCore_AUTOINIT 4(vtkInteractionStyle,vtkRenderingFreeType,vtkRenderingFreeType,vtkRenderingOpenGL)
#define vtkRenderingVolume_AUTOINIT 1(vtkRenderingVolumeOpenGL)
#include <string>
#include <kinect.h>
#include <iostream>
#include <fstream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/io/pcd_io.h> //PCL的PCD格式文件的输入输出头文件
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h> //PCL对各种格式的点的支持头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/registration/icp.h> //ICP(iterative closest point)配准
#include <pcl/registration/correspondence_rejection_surface_normal.h>
#include <pcl/console/parse.h> //pcl控制台解析
#include <pcl/ModelCoefficients.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/extract_indices.h>
//kd树
#include <pcl/kdtree/kdtree_flann.h>
//特征提取
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/normal_3d.h>
//重构
#include <boost/thread/thread.hpp>
#include <Eigen/Dense>
using namespace std;
string num2str(int i)
{
stringstream ss;
ss << i;
return ss.str();
}
//定义结构体,用于处理点云
struct PCD
{
std::string f_name; //文件名
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud; //点云指针
pcl::PointCloud<pcl::PointNormal>::Ptr cloudWithNormal;//存储估计的法线的指针
//构造函数
PCD() : cloud(new pcl::PointCloud<pcl::PointXYZ>), cloudWithNormal(new pcl::PointCloud<pcl::PointNormal>) {}; //初始化
};
int main()
{
const int numberOfViews = 8;//点云数量
std::vector<PCD, Eigen::aligned_allocator<PCD> > data; //点云数据
std::string prefix("cow");
std::string extension(".pcd"); //声明并初始化string类型变量extension,表示文件后缀名
std::string folderPath = "C:\\A0fangfang\\shiyan\\8.19\\"; // 指定工作目录路径
// 通过遍历文件名,读取pcd文件
for (int i = 0; i < numberOfViews; i++) //遍历所有的文件名
{
std::string fname = folderPath + prefix + num2str(i) + extension;
// 读取点云,并保存到models
PCD m;
m.f_name = fname;
if (pcl::io::loadPCDFile(fname, *m.cloud) == -1) //* 读入PCD格式的文件,如果文件不存在,返回-1
{
cout << "Couldn't read file " + fname + "." << endl; //文件不存在时,返回错误,终止程序。
return (-1);
}
data.push_back(m);
}
//去除离群点
for (int i = 0; i <= 1; ++i) {
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem;
outrem.setInputCloud(data[i].cloud);
outrem.setRadiusSearch(0.01);
outrem.setMinNeighborsInRadius(10);
outrem.filter(*data[i].cloud);
}
float yMax1 = -1000;
for (int i = 0; i < data[0].cloud->size(); ++i)
{
if (data[0].cloud->points[i].y>yMax1)
yMax1 = data[0].cloud->points[i].y;
}
cout << "yMax1:" << yMax1 << endl;
float yMax2 = -1000;
for (int i = 0; i < data[1].cloud->size(); ++i)
{
if (data[1].cloud->points[i].y>yMax2)
yMax2 = data[1].cloud->points[i].y;
}
cout << "yMax2:" << yMax2 << endl;
ofstream out("yMax.txt");
if (out.is_open())
{
out << "yMax1:" << yMax1 << endl;
out << "yMax2:" << yMax2 << endl;
out.close();
}
for (int i = 2; i < numberOfViews; ++i)
{
//-----------------------去除地面点云--------------------------
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond(new pcl::ConditionAnd<pcl::PointXYZ>());
/*range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("x", pcl::ComparisonOps::GT, -0.4)));
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("x", pcl::ComparisonOps::LT, 0.4)));
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LT, 1.3)));*/
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(new pcl::FieldComparison<pcl::PointXYZ>("y", pcl::ComparisonOps::GT, yMax1)));
pcl::ConditionalRemoval<pcl::PointXYZ> condrem(range_cond, false);
condrem.setInputCloud(data[i].cloud);
condrem.setKeepOrganized(false);
condrem.filter(*data[i].cloud);
//--------------------------------------------------------------
//-----------------------去除离群点------------------------
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem;
outrem.setInputCloud(data[i].cloud);
outrem.setRadiusSearch(0.01);
outrem.setMinNeighborsInRadius(10);
outrem.filter(*data[i].cloud);
//pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
//sor.setInputCloud(data[i].cloud);
//sor.setMeanK(10);
//sor.setStddevMulThresh(1.0);
//sor.filter(*data[i].cloud);
//--------------------------------------------------------------
// -------------------计算法向量----------------------
//pcl::PointCloud<pcl::PointNormal>::Ptr cloud_with_normals(new pcl::PointCloud<pcl::PointNormal>); //法向量点云对象指针
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n;//法线估计对象
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);//存储估计的法线的指针
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(data[i].cloud);
n.setInputCloud(data[i].cloud);
n.setSearchMethod(tree);
n.setRadiusSearch(0.03);
//n.setKSearch(25);
n.compute(*normals); //计算法线,结果存储在normals中
pcl::concatenateFields(*data[i].cloud, *normals, *data[i].cloudWithNormal);//将点云和法线放到一起
// ---------------------------------------------------
string fileName = folderPath + "cow" + num2str(i - 2) + "_withNormal.pcd";
pcl::io::savePCDFile(fileName, *data[i].cloudWithNormal, true);
cout << fileName << " has been saved." << endl;
// 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D viewer"));
int v1;
viewer->createViewPort(0.0, 0.0, 1.0, 1.0, v1);
viewer->setBackgroundColor(0, 0, 0);
viewer->initCameraParameters();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointNormal> cloud_color1(data[i].cloudWithNormal, 255, 255, 255);
viewer->addPointCloud(data[i].cloudWithNormal, cloud_color1, "cloud_color1", v1);
viewer->addPointCloudNormals<pcl::PointNormal>(data[i].cloudWithNormal, 50, 0.05, "source_normals", v1); //第2个参数表示多少个点显示一次向量,第3个参数表示向量长度,单位m
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "source_normals", v1);
while (!viewer->wasStopped()) {
viewer->spinOnce();
}
}
std::system("pause");
return 0;
}3、基于Kinect v2+PCL的模型奶牛重建(下)——点云融合_奶牛的点云数据-优快云博客
错误1
#define vtkRenderingCore_AUTOINIT 4(vtkInteractionStyle,vtkRenderingFreeType,vtkRenderingFreeType,vtkRenderingOpenGL)
#define vtkRenderingVolume_AUTOINIT 1(vtkRenderingVolumeOpenGL)
#include <string>
#include <kinect.h>
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/io/pcd_io.h> //PCL的PCD格式文件的输入输出头文件
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h> //PCL对各种格式的点的支持头文件
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/radius_outlier_removal.h>
#include <pcl/filters/conditional_removal.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include <pcl/registration/icp.h> //ICP(iterative closest point)配准
#include <pcl/registration/icp_nl.h>
#include <pcl/registration/correspondence_rejection_surface_normal.h>
#include <pcl/registration/correspondence_rejection_one_to_one.h>
#include <pcl/registration/correspondence_estimation_normal_shooting.h>
#include <pcl/console/parse.h> //pcl控制台解析
#include <pcl/ModelCoefficients.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/filters/extract_indices.h>
//kd树
#include <pcl/kdtree/kdtree_flann.h>
//特征提取
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/normal_3d.h>
//重构
#include <pcl/surface/gp3.h>
#include <pcl/surface/poisson.h>
#include <boost/thread/thread.hpp>
#include <Eigen/Dense>
using namespace std;
const float yMax = -0.218759;
string num2str(int i)
{
stringstream ss;
ss << i;
return ss.str();
}
// Returns the rotation matrix around a vector placed at a point , rotate by angle t
Eigen::Matrix4f rot_mat(const Eigen::Vector3f& point, const Eigen::Vector3f& vector, const float t)
{
float u = vector(0);
float v = vector(1);
float w = vector(2);
float a = point(0);
float b = point(1);
float c = point(2);
Eigen::Matrix4f matrix;
matrix << u*u + (v*v + w*w)*cos(t), u*v*(1 - cos(t)) - w*sin(t), u*w*(1 - cos(t)) + v*sin(t), (a*(v*v + w*w) - u*(b*v + c*w))*(1 - cos(t)) + (b*w - c*v)*sin(t),
u*v*(1 - cos(t)) + w*sin(t), v*v + (u*u + w*w)*cos(t), v*w*(1 - cos(t)) - u*sin(t), (b*(u*u + w*w) - v*(a*u + c*w))*(1 - cos(t)) + (c*u - a*w)*sin(t),
u*w*(1 - cos(t)) - v*sin(t), v*w*(1 - cos(t)) + u*sin(t), w*w + (u*u + v*v)*cos(t), (c*(u*u + v*v) - w*(a*u + b*v))*(1 - cos(t)) + (a*v - b*u)*sin(t),
0, 0, 0, 1;
return matrix;
}
//定义结构体,用于处理点云
struct PCD
{
std::string f_name; //文件名
pcl::PointCloud<pcl::PointNormal>::Ptr cloudWithNormal;//存储估计的法线的指针
Eigen::Vector3f mass;//存储点云的质心
//构造函数
PCD() : cloudWithNormal(new pcl::PointCloud<pcl::PointNormal>), mass(Eigen::Vector3f::Zero()) {}; //初始化
};
void UpdatePCDMass(PCD& m)
{
m.mass.Zero();
for (int j = 0; j < m.cloudWithNormal->size(); ++j)
{
m.mass(0) += m.cloudWithNormal->points[j].x;
m.mass(1) += m.cloudWithNormal->points[j].y;
m.mass(2) += m.cloudWithNormal->points[j].z;
}
m.mass /= m.cloudWithNormal->size();
}
struct AABB
{
Eigen::Vector3f center;
Eigen::Vector3f min;
Eigen::Vector3f max;
};
AABB computerAABB(pcl::PointCloud<pcl::PointNormal>::Ptr p)
{
AABB aabb;
aabb.min(0) = +10000;
aabb.min(1) = +10000;
aabb.min(2) = +10000;
aabb.max(0) = -10000;
aabb.max(1) = -10000;
aabb.max(2) = -10000;
for (int i = 0; i < p->size(); ++i)
{
if (p->points[i].x < aabb.min(0))
aabb.min(0) = p->points[i].x;
if (p->points[i].y < aabb.min(1))
aabb.min(1) = p->points[i].y;
if (p->points[i].z < aabb.min(2))
aabb.min(2) = p->points[i].z;
if (p->points[i].x > aabb.max(0))
aabb.max(0) = p->points[i].x;
if (p->points[i].y > aabb.max(1))
aabb.max(1) = p->points[i].y;
if (p->points[i].z > aabb.max(2))
aabb.max(2) = p->points[i].z;
}
aabb.center = 0.5f*(aabb.max + aabb.min);
return aabb;
}
int main()
{
const int numberOfViews = 6;//点云数量
std::vector<PCD, Eigen::aligned_allocator<PCD> > data; //点云数据
std::string prefix("C:\\A0fangfang\\shiyan\\8.19\\cow");
std::string extension("_withNormal.pcd"); // 声明并初始化string类型变量extension,表示文件后缀名
// 通过遍历文件名,读取pcd文件
for (int i = 0; i < numberOfViews; i++) //遍历所有的文件名
{
std::string fname = prefix + num2str(i) + extension;
// 读取点云,并保存到models
PCD m;
m.f_name = fname;
if (pcl::io::loadPCDFile(fname, *m.cloudWithNormal) == -1) //* 读入PCD格式的文件,如果文件不存在,返回-1
{
cout << "Couldn't read file " + fname + "." << endl; //文件不存在时,返回错误,终止程序。
return (-1);
}
for (int j = 0; j < m.cloudWithNormal->size(); ++j)
{
m.mass(0) += m.cloudWithNormal->points[j].x;
m.mass(1) += m.cloudWithNormal->points[j].y;
m.mass(2) += m.cloudWithNormal->points[j].z;
}
m.mass /= m.cloudWithNormal->size();
data.push_back(m);
}
//-----------------------去除离群点------------------------
pcl::RadiusOutlierRemoval<pcl::PointNormal> outrem;
outrem.setRadiusSearch(0.01);
outrem.setMinNeighborsInRadius(15);
for (int i = 0; i < numberOfViews; ++i)
{
outrem.setInputCloud(data[i].cloudWithNormal);
outrem.filter(*data[i].cloudWithNormal);
UpdatePCDMass(data[i]);
}
//--------------------------------------------------------------
Eigen::Vector3f totalMass1 = Eigen::Vector3f::Zero();//记录所有点云的质心
int totalNumberOfPoints1 = 0;//记录所有点云的点个数
for (int i = 0; i < 3; ++i)
{
totalNumberOfPoints1 += data[i].cloudWithNormal->size();
totalMass1 += data[i].mass * data[i].cloudWithNormal->size();
}
totalMass1 /= totalNumberOfPoints1;
Eigen::Vector3f totalMass2 = Eigen::Vector3f::Zero();//记录所有点云的质心
int totalNumberOfPoints2 = 0;//记录所有点云的点个数
for (int i = 3; i < 6; ++i)
{
totalNumberOfPoints2 += data[i].cloudWithNormal->size();
totalMass2 += data[i].mass * data[i].cloudWithNormal->size();
}
totalMass2 /= totalNumberOfPoints2;
Eigen::Vector3f upVector(0, 1.0, 0);
Eigen::Matrix4f rotationMatrix = rot_mat(totalMass1, upVector, M_PI / 3);
pcl::transformPointCloudWithNormals(*data[1].cloudWithNormal, *data[1].cloudWithNormal, rotationMatrix);
UpdatePCDMass(data[1]);
rotationMatrix = rot_mat(totalMass1, upVector, -M_PI / 3);
pcl::transformPointCloudWithNormals(*data[2].cloudWithNormal, *data[2].cloudWithNormal, rotationMatrix);
UpdatePCDMass(data[2]);
rotationMatrix = rot_mat(totalMass2, upVector, M_PI / 3);
pcl::transformPointCloudWithNormals(*data[4].cloudWithNormal, *data[4].cloudWithNormal, rotationMatrix);
UpdatePCDMass(data[4]);
rotationMatrix = rot_mat(totalMass2, upVector, -M_PI / 3);
pcl::transformPointCloudWithNormals(*data[5].cloudWithNormal, *data[5].cloudWithNormal, rotationMatrix);
UpdatePCDMass(data[5]);
pcl::IterativeClosestPointWithNormals<pcl::PointNormal, pcl::PointNormal> icpWithNormals;
icpWithNormals.setMaxCorrespondenceDistance(0.5);
icpWithNormals.setMaximumIterations(100);
icpWithNormals.setTransformationEpsilon(1e-10);
icpWithNormals.setEuclideanFitnessEpsilon(0.01);
icpWithNormals.setInputCloud(data[1].cloudWithNormal);
icpWithNormals.setInputTarget(data[0].cloudWithNormal);
icpWithNormals.align(*data[1].cloudWithNormal);
icpWithNormals.setInputCloud(data[2].cloudWithNormal);
icpWithNormals.setInputTarget(data[0].cloudWithNormal);
icpWithNormals.align(*data[2].cloudWithNormal);
icpWithNormals.setInputCloud(data[4].cloudWithNormal);
icpWithNormals.setInputTarget(data[3].cloudWithNormal);
icpWithNormals.align(*data[4].cloudWithNormal);
icpWithNormals.setInputCloud(data[5].cloudWithNormal);
icpWithNormals.setInputTarget(data[3].cloudWithNormal);
icpWithNormals.align(*data[5].cloudWithNormal);
pcl::PointCloud<pcl::PointNormal>::Ptr Front(new pcl::PointCloud<pcl::PointNormal>);
pcl::PointCloud<pcl::PointNormal>::Ptr Back(new pcl::PointCloud<pcl::PointNormal>);
// ----------------------------------------------------
*Front += *data[0].cloudWithNormal;
*Front += *data[1].cloudWithNormal;
*Front += *data[2].cloudWithNormal;
UpdatePCDMass(data[1]);
UpdatePCDMass(data[2]);
*Back += *data[3].cloudWithNormal;
*Back += *data[4].cloudWithNormal;
*Back += *data[5].cloudWithNormal;
UpdatePCDMass(data[4]);
UpdatePCDMass(data[5]);
// ----------------------------------------------------
//---------------前后配准------------------------------
Eigen::Vector3f mass = Eigen::Vector3f::Zero();
for (int i = 0; i < Back->points.size(); ++i) {
mass(0) += Back->points[i].x;
mass(1) += Back->points[i].y;
mass(2) += Back->points[i].z;
}
mass /= Back->points.size();
rotationMatrix = rot_mat(mass, upVector, M_PI);
pcl::transformPointCloudWithNormals(*Back, *Back, rotationMatrix);
Eigen::Vector3f plane_left(-1, 0, 0);
Eigen::Vector3f plane_right(1, 0, 0);
float cos_angle = cos(M_PI * 10 / 180);
AABB BackAABB = computerAABB(Back);
cout << "BackAABB's center:\n" << BackAABB.center << endl;
cout << "BackAABB's Z Length:\n" << BackAABB.max(2) - BackAABB.min(2) << endl;
AABB FrontAABB = computerAABB(Front);
cout << "FrontAABB's center:\n" << FrontAABB.center << endl;
cout << "FrontAABB's Z Length:\n" << FrontAABB.max(2) - FrontAABB.min(2) << endl;
Eigen::Vector3f diff = FrontAABB.center - BackAABB.center;
Eigen::Matrix4f translationMatrix = Eigen::Matrix4f::Identity();
translationMatrix(0, 3) = diff(0);
translationMatrix(1, 3) = diff(1);
translationMatrix(2, 3) = FrontAABB.max(2) - BackAABB.min(2) - (FrontAABB.max(2) - FrontAABB.min(2))*0.8;
pcl::transformPointCloudWithNormals(*Back, *Back, translationMatrix);
cout << "左右面配准" << endl;
int iteration = 100;
for (int iter = 0; iter < iteration; ++iter)
{
pcl::IndicesPtr source_indices(new std::vector<int>());
for (int i = 0; i < Back->points.size(); ++i) {
if (Back->points[i].y>yMax)
continue;
Eigen::Vector3f n = Back->points[i].getNormalVector3fMap();
n.normalize();
if (n.transpose() * plane_left > cos_angle) {
source_indices->push_back(i);
continue;
}
if (n.transpose() * plane_right > cos_angle) {
source_indices->push_back(i);
}
}
//cout << "Source Indices: " << source_indices->size() << endl;
pcl::IndicesPtr target_indices(new std::vector<int>());
for (int i = 0; i < Front->points.size(); ++i) {
if (Front->points[i].y>yMax)
continue;
Eigen::Vector3f n = Front->points[i].getNormalVector3fMap();
n.normalize();
if (n.transpose() * plane_left > cos_angle) {
target_indices->push_back(i);
continue;
}
if (n.transpose() * plane_right > cos_angle) {
target_indices->push_back(i);
}
}
//cout << "Target Indices: " << target_indices->size() << endl;
pcl::registration::CorrespondenceEstimationNormalShooting<pcl::PointNormal, pcl::PointNormal, pcl::PointNormal> correst;
correst.setInputCloud(Back);
correst.setSourceNormals(Back);
correst.setInputTarget(Front);
correst.setIndicesSource(source_indices);
correst.setIndicesTarget(target_indices);
correst.setKSearch(15);
pcl::CorrespondencesPtr all_correspondences(new pcl::Correspondences);
correst.determineReciprocalCorrespondences(*all_correspondences);
//cout << "Correspondences (Before) : " << all_correspondences->size() << "\n";
pcl::registration::CorrespondenceRejectorSurfaceNormal rejector;
rejector.initializeDataContainer<pcl::PointNormal, pcl::PointNormal>();
rejector.setInputSource<pcl::PointNormal>(Back);
rejector.setInputTarget<pcl::PointNormal>(Front);
rejector.setInputNormals<pcl::PointNormal, pcl::PointNormal>(Back);
rejector.setTargetNormals<pcl::PointNormal, pcl::PointNormal>(Front);
rejector.setInputCorrespondences(all_correspondences);
rejector.setThreshold(M_PI * 10 / 180);
pcl::CorrespondencesPtr correspondences_after_rejector(new pcl::Correspondences);
rejector.getCorrespondences(*correspondences_after_rejector);
//cout << "Correspondences (After) : " << correspondences_after_rejector->size() << "\n";
Eigen::Matrix4f transformation;
//pcl::registration::TransformationEstimationSVD<pcl::PointNormal, pcl::PointNormal> trans_est_svd;
//trans_est_svd.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
pcl::registration::TransformationEstimationLM<pcl::PointNormal, pcl::PointNormal> trans_est_lm;
trans_est_lm.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
//pcl::registration::TransformationEstimationPointToPlaneLLS<pcl::PointNormal, pcl::PointNormal> trans_est_PointToPlane;
//trans_est_PointToPlane.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
pcl::transformPointCloudWithNormals(*Back, *Back, transformation);
cout << "Iteration: " << iter << endl;
//cout << "Matrix " << iter << ":\n" << transformation << endl;
if (transformation.isIdentity())
break;
}
cout << "上下面配准" << endl;
for (int iter = 0; iter < iteration; ++iter)
{
pcl::IndicesPtr source_indices(new std::vector<int>());
for (int i = 0; i < Back->points.size(); ++i) {
if (Back->points[i].y>yMax)
continue;
Eigen::Vector3f n = Back->points[i].getNormalVector3fMap();
n.normalize();
if (n.transpose() * upVector > cos_angle) {
source_indices->push_back(i);
continue;
}
}
//cout << "Source Indices: " << source_indices->size() << endl;
pcl::IndicesPtr target_indices(new std::vector<int>());
for (int i = 0; i < Front->points.size(); ++i) {
if (Front->points[i].y>yMax)
continue;
Eigen::Vector3f n = Front->points[i].getNormalVector3fMap();
n.normalize();
if (n.transpose() * upVector > cos_angle) {
target_indices->push_back(i);
continue;
}
}
//cout << "Target Indices: " << target_indices->size() << endl;
pcl::registration::CorrespondenceEstimationNormalShooting<pcl::PointNormal, pcl::PointNormal, pcl::PointNormal> correst;
correst.setInputCloud(Back);
correst.setSourceNormals(Back);
correst.setInputTarget(Front);
correst.setIndicesSource(source_indices);
correst.setIndicesTarget(target_indices);
correst.setKSearch(15);
pcl::CorrespondencesPtr all_correspondences(new pcl::Correspondences);
correst.determineReciprocalCorrespondences(*all_correspondences);
//cout << "Correspondences (Before) : " << all_correspondences->size() << "\n";
pcl::registration::CorrespondenceRejectorSurfaceNormal rejector;
rejector.initializeDataContainer<pcl::PointNormal, pcl::PointNormal>();
rejector.setInputSource<pcl::PointNormal>(Back);
rejector.setInputTarget<pcl::PointNormal>(Front);
rejector.setInputNormals<pcl::PointNormal, pcl::PointNormal>(Back);
rejector.setTargetNormals<pcl::PointNormal, pcl::PointNormal>(Front);
rejector.setInputCorrespondences(all_correspondences);
rejector.setThreshold(M_PI * 10 / 180);
pcl::CorrespondencesPtr correspondences_after_rejector(new pcl::Correspondences);
rejector.getCorrespondences(*correspondences_after_rejector);
//cout << "Correspondences (After) : " << correspondences_after_rejector->size() << "\n";
Eigen::Matrix4f transformation;
pcl::registration::TransformationEstimationSVD<pcl::PointNormal, pcl::PointNormal> trans_est_svd;
trans_est_svd.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
//pcl::registration::TransformationEstimationLM<pcl::PointNormal, pcl::PointNormal> trans_est_lm;
//trans_est_lm.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
//pcl::registration::TransformationEstimationPointToPlaneLLS<pcl::PointNormal, pcl::PointNormal> trans_est_PointToPlane;
//trans_est_PointToPlane.estimateRigidTransformation(*Back, *Front, *correspondences_after_rejector, transformation);
pcl::transformPointCloudWithNormals(*Back, *Back, transformation);
cout << "Iteration: " << iter << endl;
//cout << "Matrix " << iter << ":\n" << transformation << endl;
if (transformation.isIdentity())
break;
}
BackAABB = computerAABB(Back);
cout << "BackAABB's center:\n" << BackAABB.center << endl;
cout << "BackAABB's Z Length:\n" << BackAABB.max(2) - BackAABB.min(2) << endl;
FrontAABB = computerAABB(Front);
cout << "FrontAABB's center:\n" << FrontAABB.center << endl;
cout << "FrontAABB's Z Length:\n" << FrontAABB.max(2) - FrontAABB.min(2) << endl;
cout << "Z Length:\n" << FrontAABB.max(2) - BackAABB.min(2) << endl;
pcl::PointCloud<pcl::PointNormal>::Ptr cloud(new pcl::PointCloud<pcl::PointNormal>);
*cloud = *Back;
*cloud += *Front;
std::string outputFilename = "C:\\A0fangfang\\shiyan\\8.19\\cow.ply";
pcl::io::savePLYFile(outputFilename, *cloud, true);
// 显示结果图
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D viewer"));
int v1; //定义两个窗口v1,v2,窗口v1用来显示初始位置,v2用以显示配准过程
int v2;
viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1); //四个窗口参数分别对应x_min,y_min,x_max.y_max.
viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);
viewer->setBackgroundColor(0, 0, 0);
//viewer->addPolygonMesh(mesh, "mesh2", v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointNormal> cloud_color4(Front, 0, 255, 0);
viewer->addPointCloud(Front, cloud_color4, "cloud_color4", v1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointNormal> cloud_color5(Back, 255, 0, 0);
viewer->addPointCloud(Back, cloud_color5, "cloud_color5", v1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointNormal> cloud_color6(Front, 255, 255, 255);
viewer->addPointCloud(Front, cloud_color6, "cloud_color6", v2);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointNormal> cloud_color7(Back, 255, 255, 255);
viewer->addPointCloud(Back, cloud_color7, "cloud_color7", v2);
viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spinOnce();
}
std::system("pause");
return 0;
}如果报错
C1128 节数超过对象文件格式限制: 请使用 /bigobj 进行编译
C1128 节数超过对象文件格式限制: 请使用 /bigobj 进行编译_严重性代码说明项目文件行禁止显示状态 错误c1128节数超过对象文件格式限-优快云博客 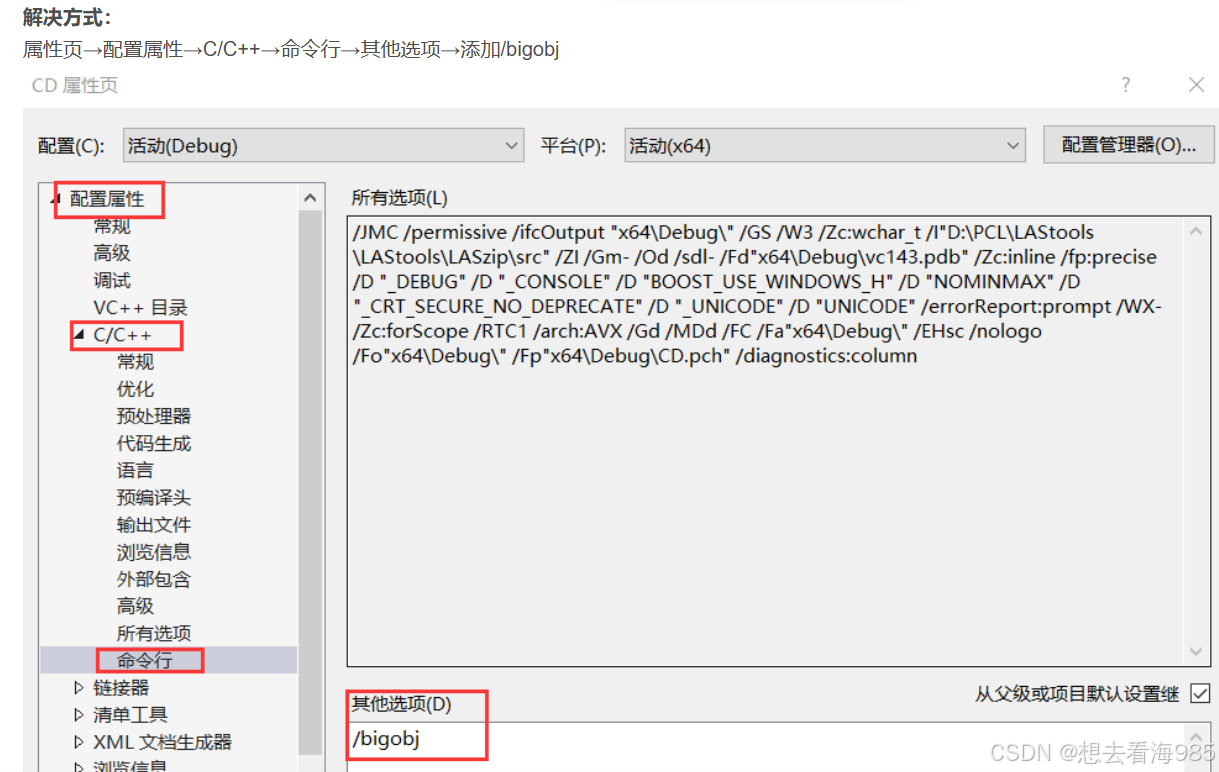

















 584
584

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









