







控制包括五个舵机的机械臂
import sys
from PyQt5.QtWidgets import QApplication, QWidget, QVBoxLayout, QPushButton, QLineEdit
import socket
class RobotControlClient(QWidget):
def __init__(self):
super().__init__()
self.init_ui()
def init_ui(self):
self.setWindowTitle('机器人控制客户端')
layout = QVBoxLayout()
# 添加输入服务器IP地址的行
self.ip_edit = QLineEdit()
self.ip_edit.setPlaceholderText("服务器IP地址")
layout.addWidget(self.ip_edit)
# 添加输入服务器端口号的行
self.port_edit = QLineEdit()
self.port_edit.setPlaceholderText("服务器端口号")
layout.addWidget(self.port_edit)
commands = ["Stop", "Forward", "Backward", "TurnLeft", "TurnRight", "Up", "Down", "Left", "Right"]
for command in commands:
button = QPushButton(command)
button.clicked.connect(lambda _, cmd=command: self.send_command(cmd))
layout.addWidget(button)
self.setLayout(layout)
def send_command(self, command):
server_ip = self.ip_edit.text()
server_port = int(self.port_edit.text())
server_address = (server_ip, server_port)
with socket.socket(socket.AF_INET, socket.SOCK_DGRAM) as s:
s.sendto(command.encode('utf-8'), server_address)
response, _ = s.recvfrom(1024)
print(response.decode('utf-8'))
if __name__ == '__main__':
app = QApplication(sys.argv)
client = RobotControlClient()
client.show()
sys.exit(app.exec_())
效果图如下: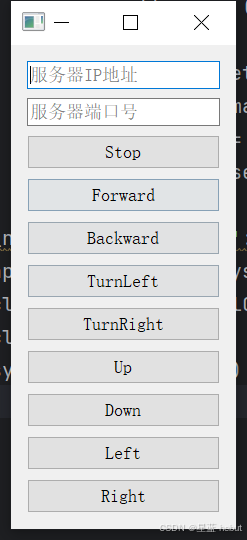
其中两个命令为一组,控制一个舵机

















 800
800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









