






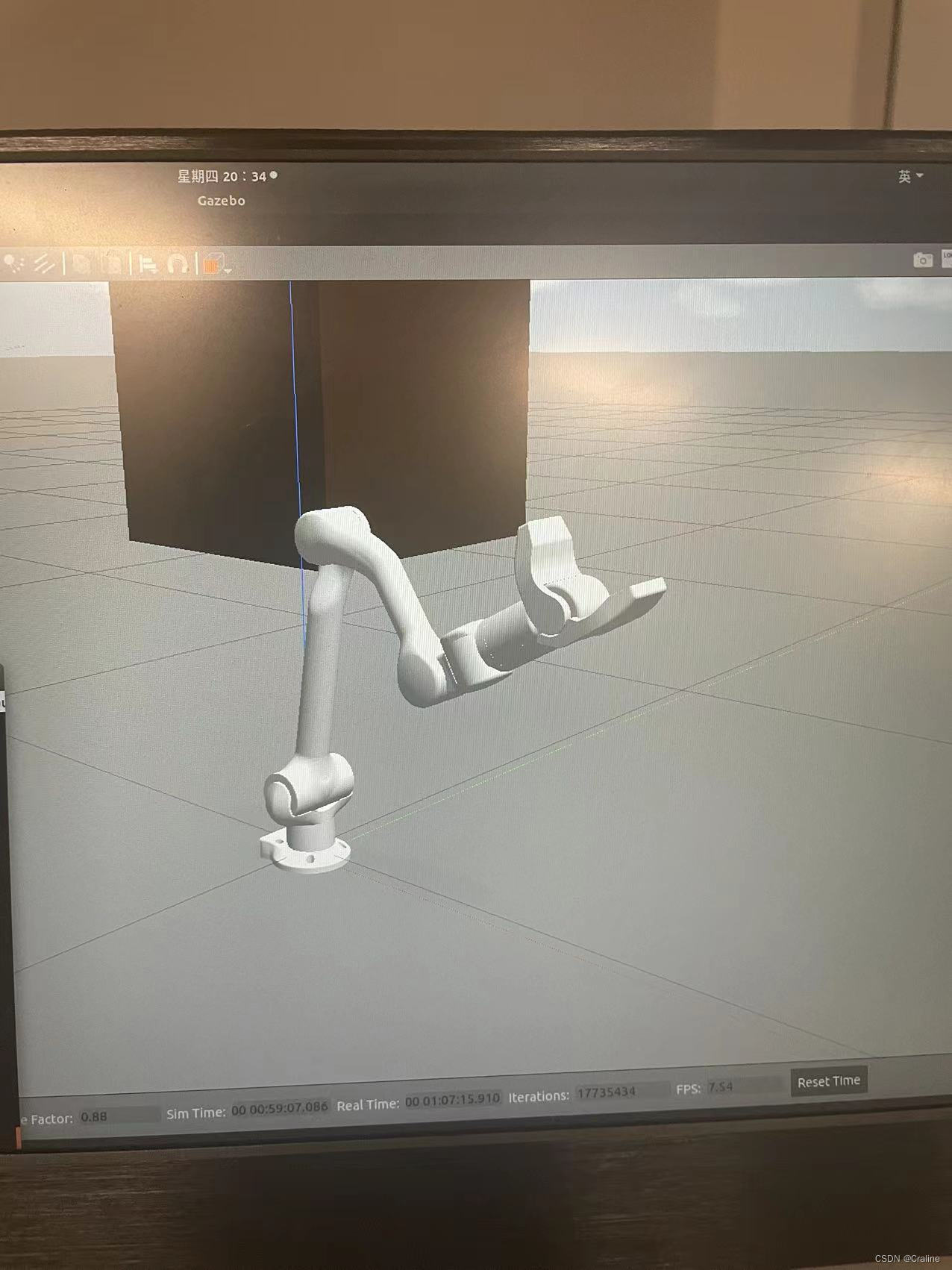
Unitree Z1 机械臂
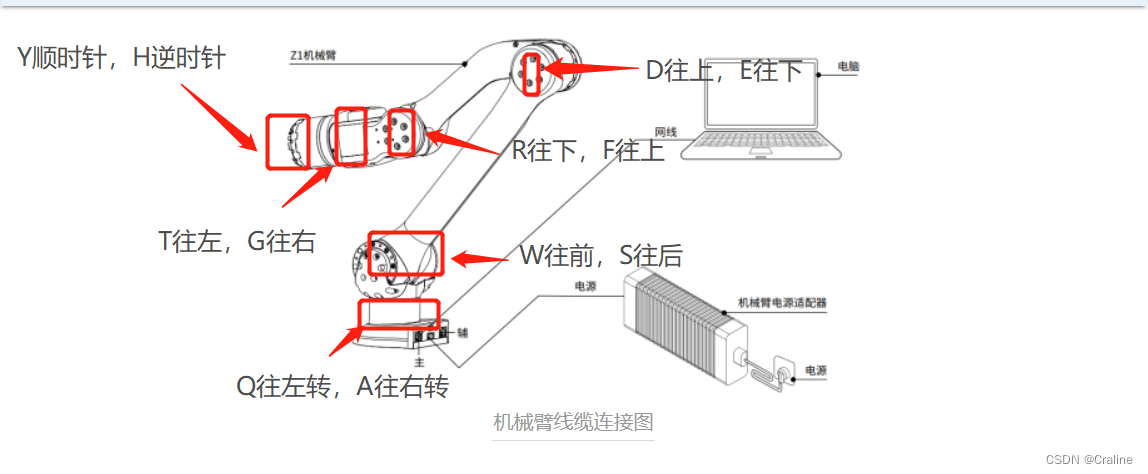
下图是相对于图片来说不同按钮控制的方向:
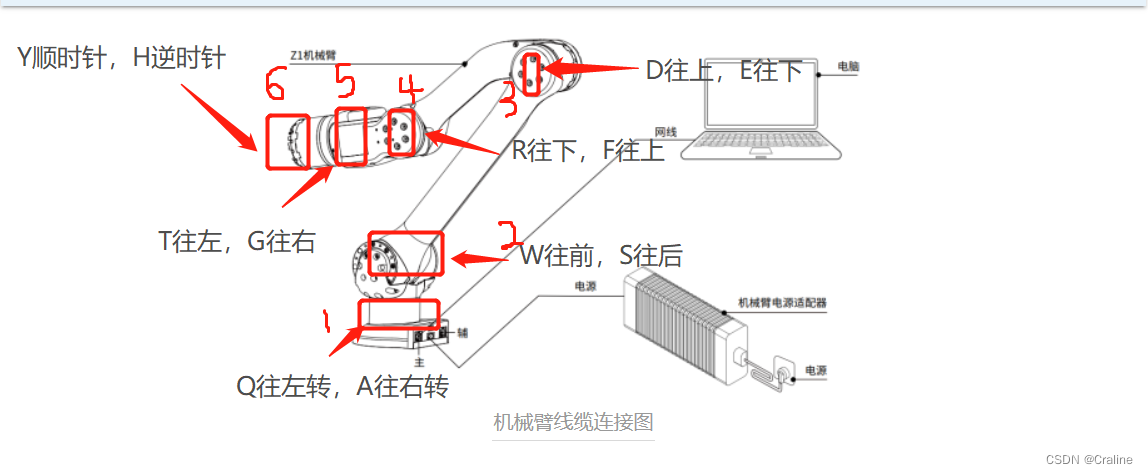
将每个可以活动的关节标号数字,便于区分。
参考开发文档的图片(笛卡尔空间控制):
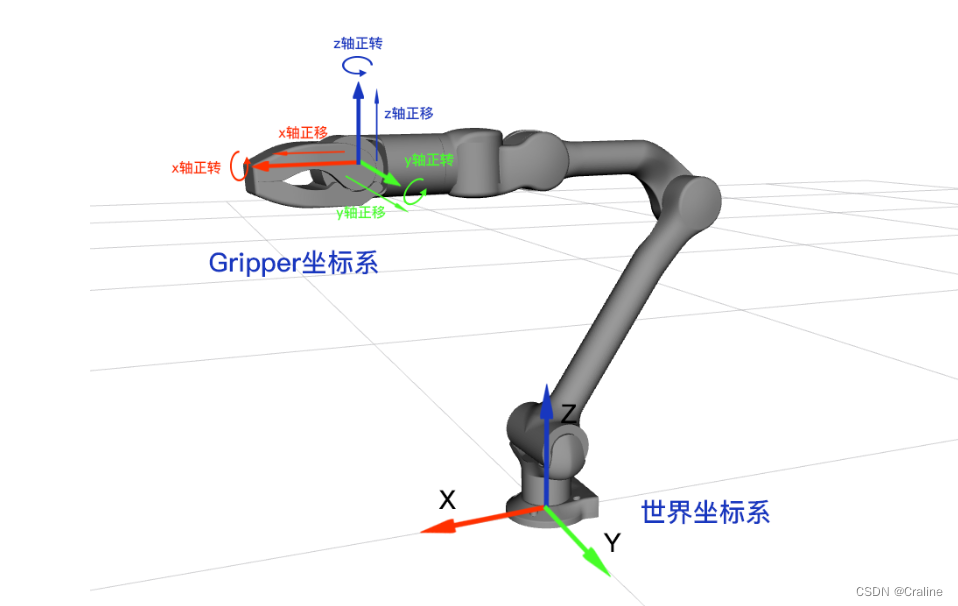
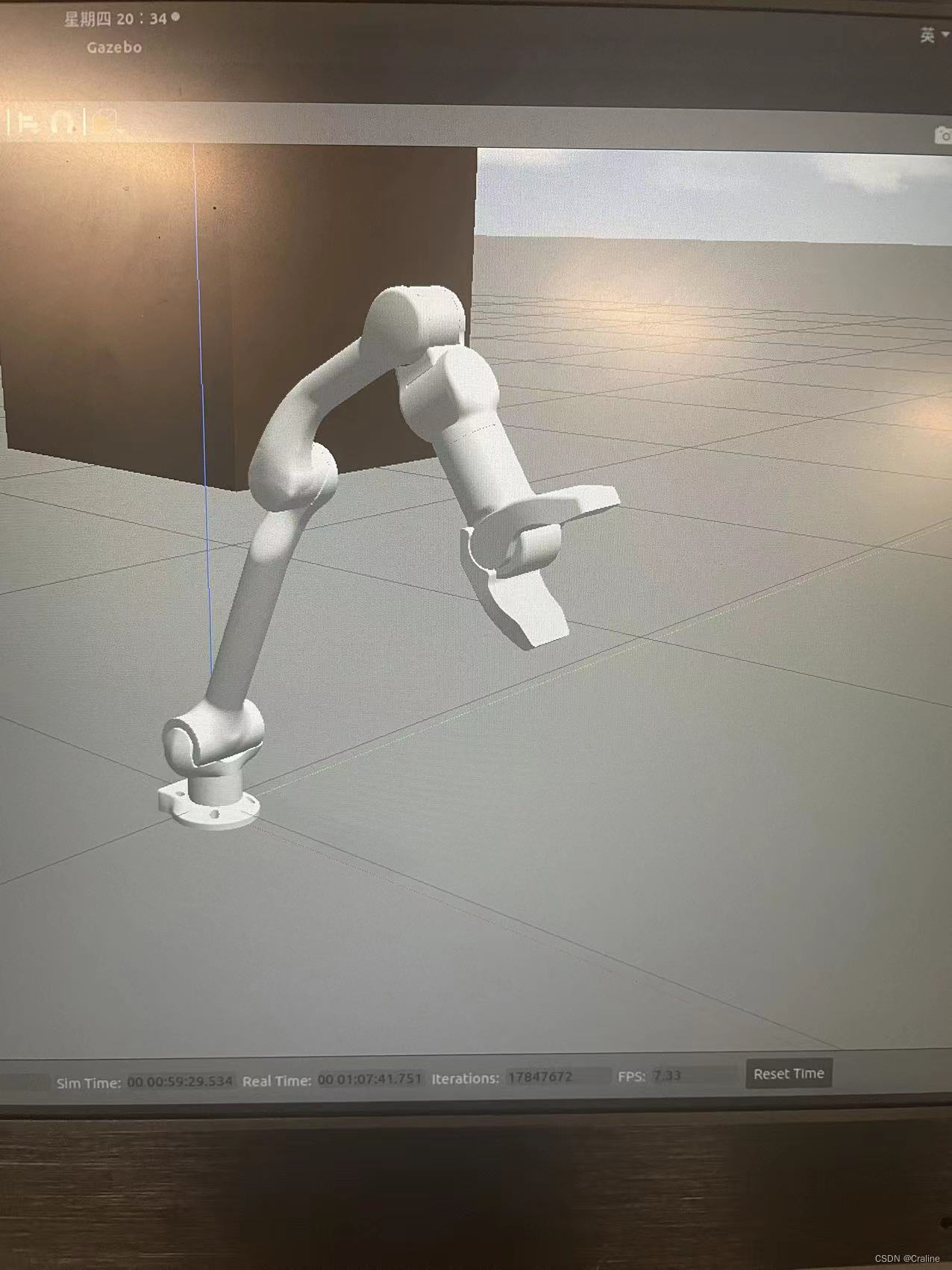
在开发这个机械臂之前我们需要先理解一下这个机械臂是怎么来运动的:
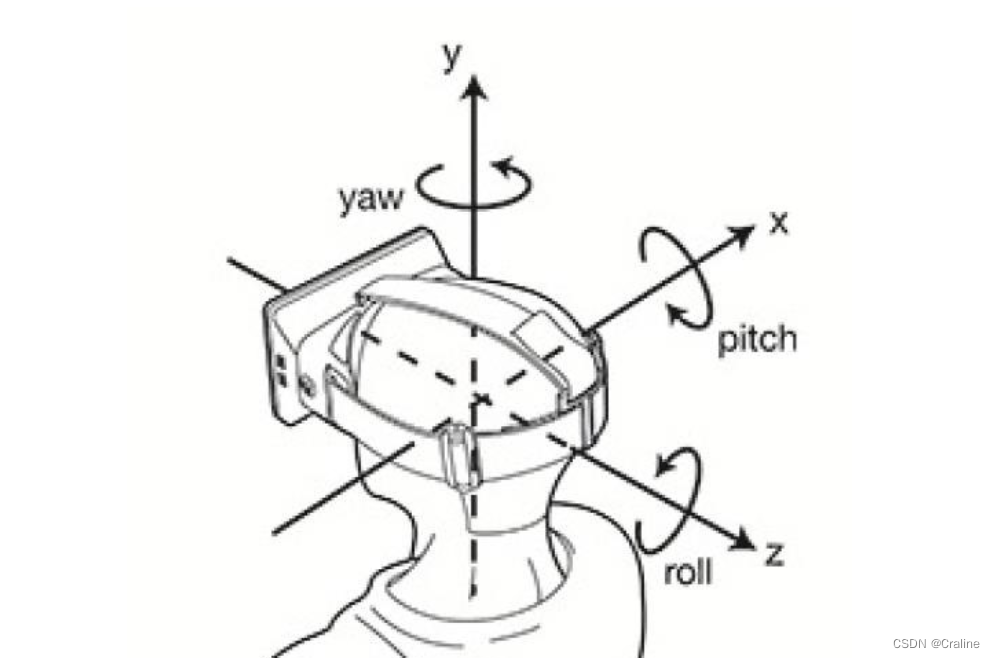
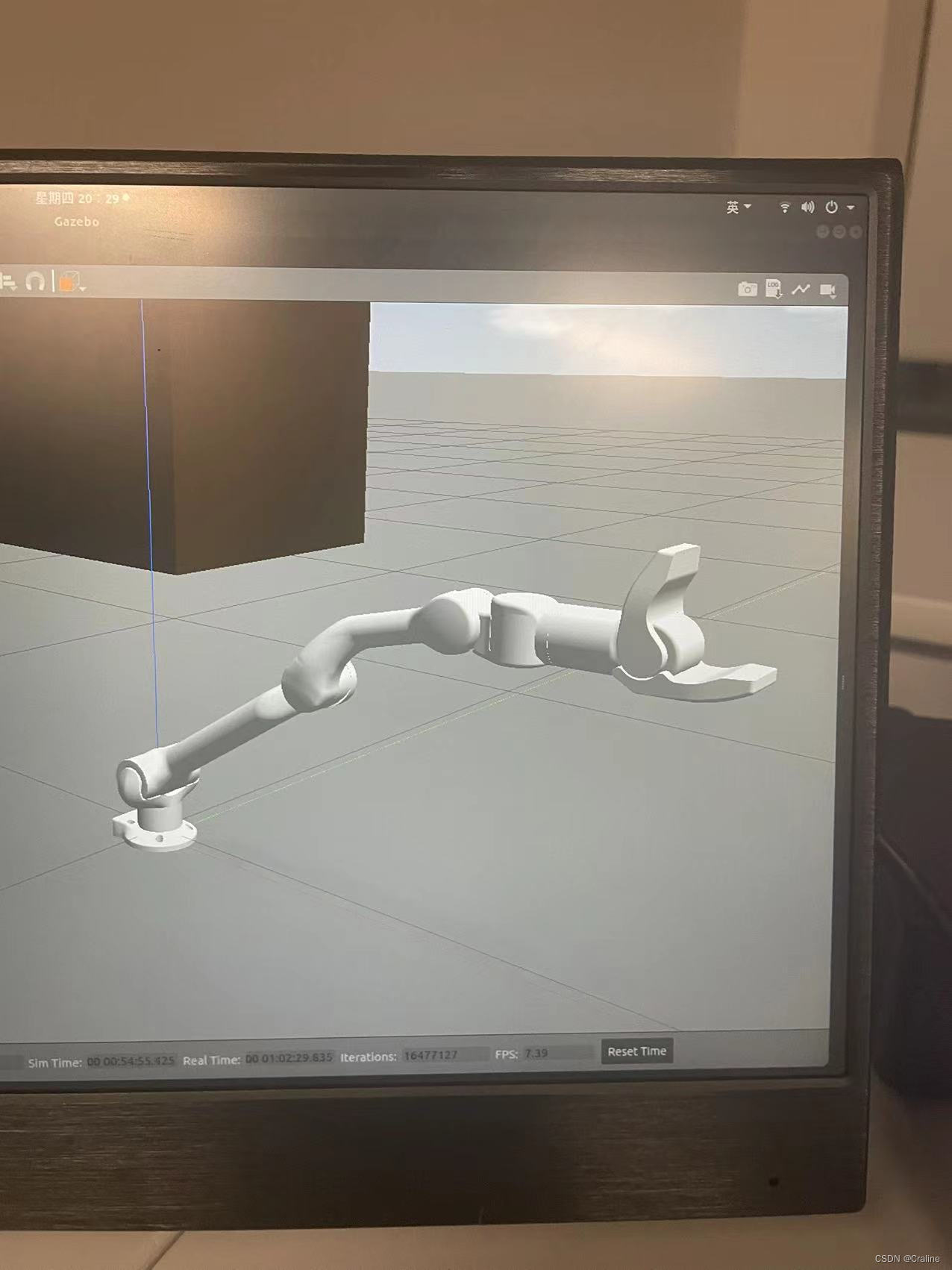
机械臂姿态控制(部分情况)
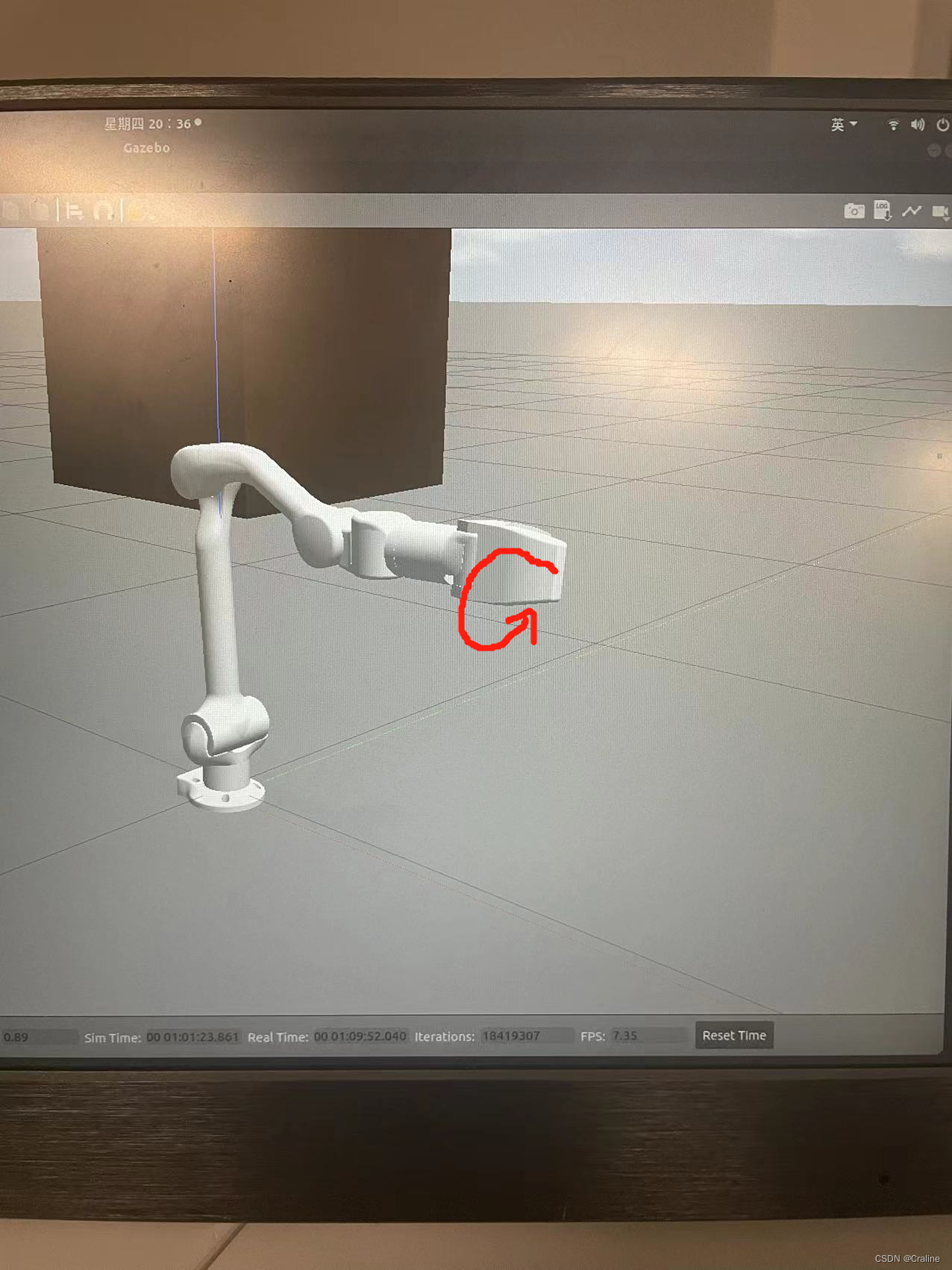
directions<<0,0,0,0,0,0,-1
(最后一位的-1,1是控制机械臂爪子的张开和闭合,-1是张开,1是闭合)

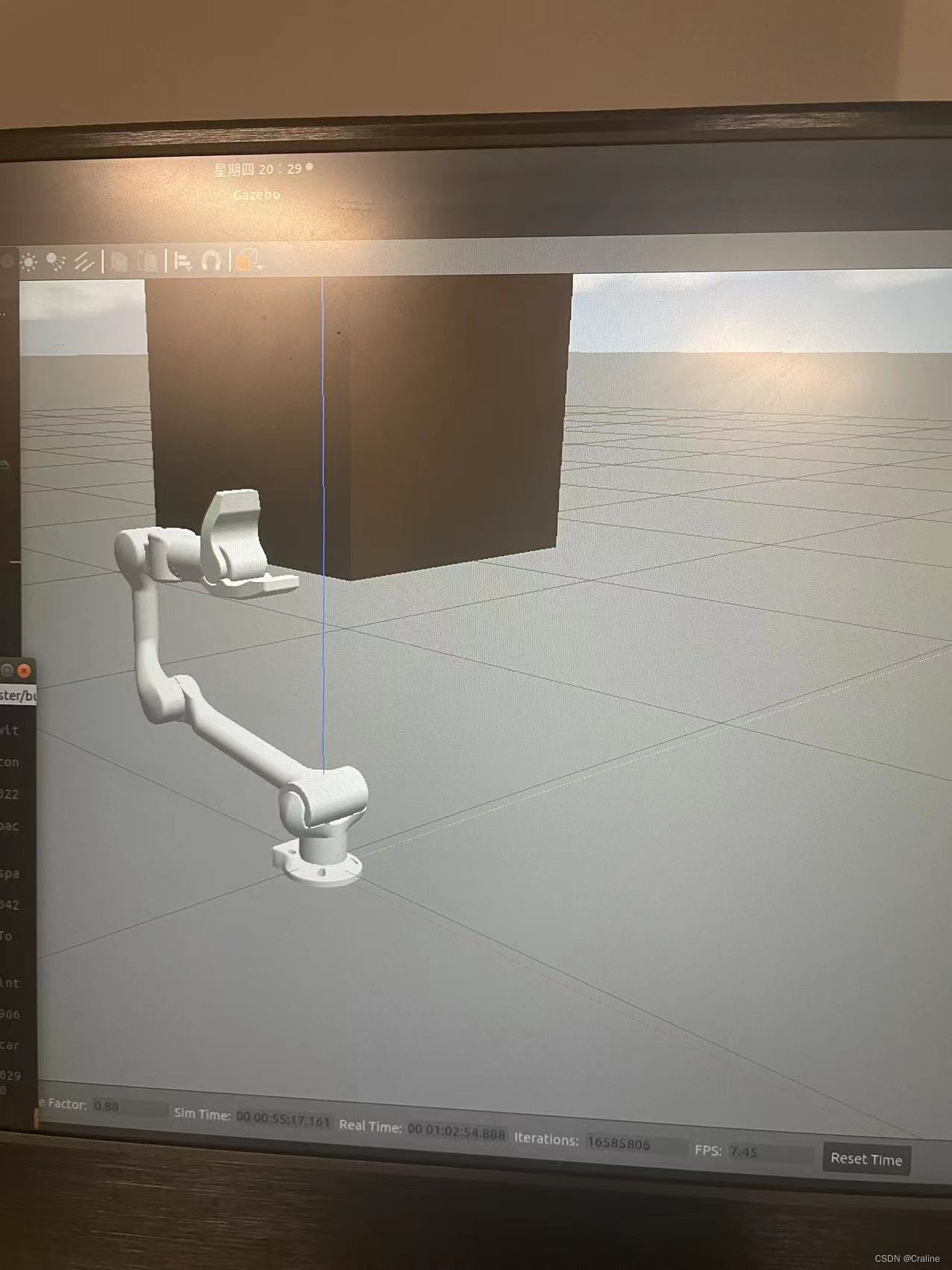
directions<<0,0,0,0,0,-1,-1
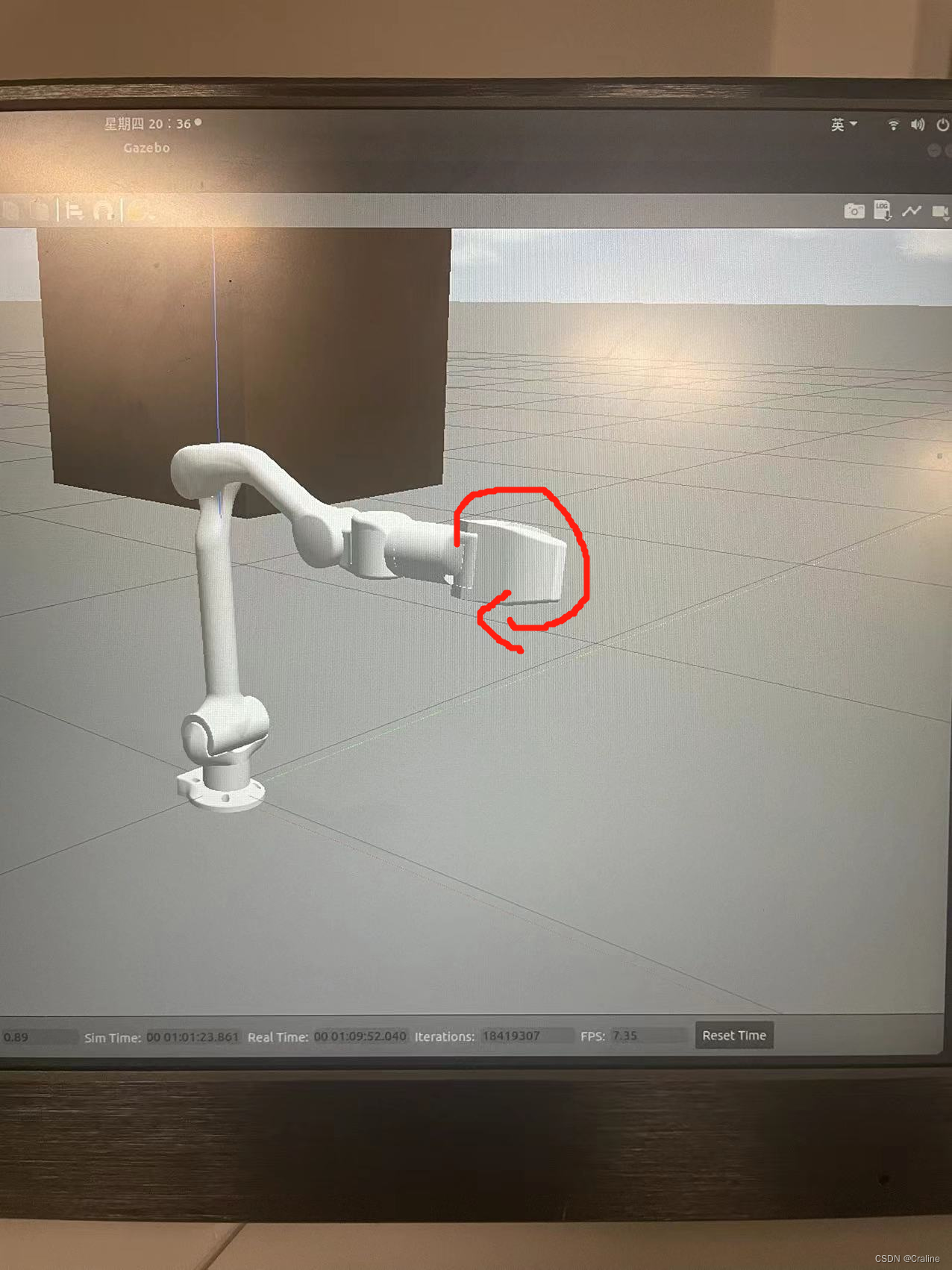
第六位控制3转轴的运动
directions<<0,0,0,0,0,1,-1
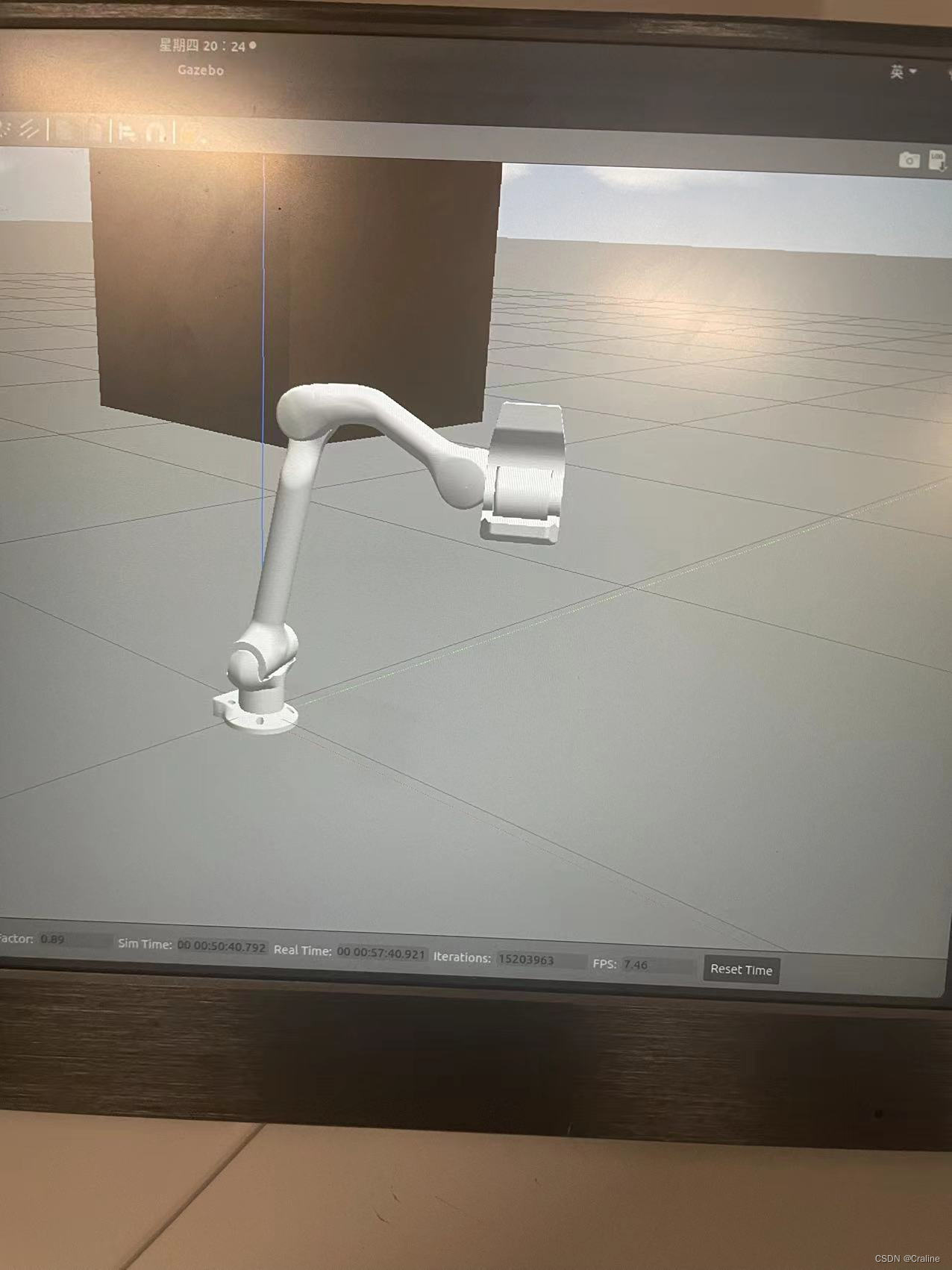
directions<<0,0,0,0,1,1,-1
第五位控制1号转轴(往左往右转)
directions<<0,0,0,0,-1,1,-1
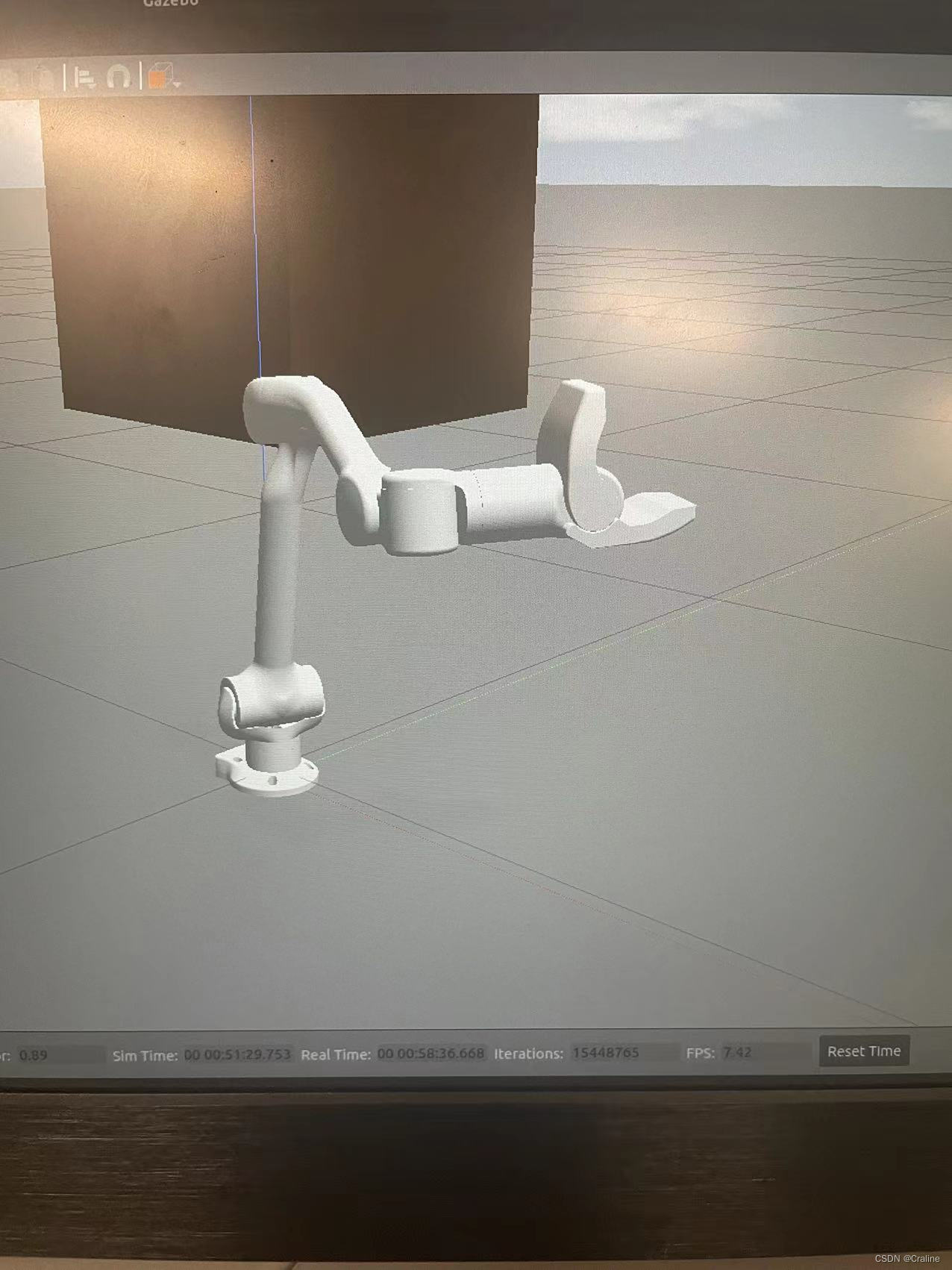
directions<<0,0,0,1,0,0,-1
directions<<0,0,0,-1,0,0,-1
directions<<0,0,-1,0,0,0,-1
directions<<0,0,1,0,0,0,-1
directions<<0,-1,0,0,0,0,-1
directions<<0,1,0,0,0,0,-1
directions<<-1,0,0,0,0,0,-1
directions<<1,0,0,0,0,0,-1


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











