






 本文详细指导如何在树莓派上安装Ubuntu,包括镜像烧录、Wi-Fi配置、更换国内源、安装桌面版、ROS和mavros的安装,以及使用vscode的工作空间编译环境设置。
本文详细指导如何在树莓派上安装Ubuntu,包括镜像烧录、Wi-Fi配置、更换国内源、安装桌面版、ROS和mavros的安装,以及使用vscode的工作空间编译环境设置。
目录
2.1 连接Wi-Fi(50-cloud-init.yaml文件(需有显示屏和键盘))
1 安装ubuntu
1.1 树莓派镜像烧录器(树莓派官网)
根据自己的情况下载,这个是烧录工具,不是镜像。电脑的系统是windows,所以选windows。
下载下来的是一个imager_latest.exe,运行安装即可。
安装后在桌面是没有的,可以在开始界面找到并添加快捷方式
插入SD卡,选择要下载的系统
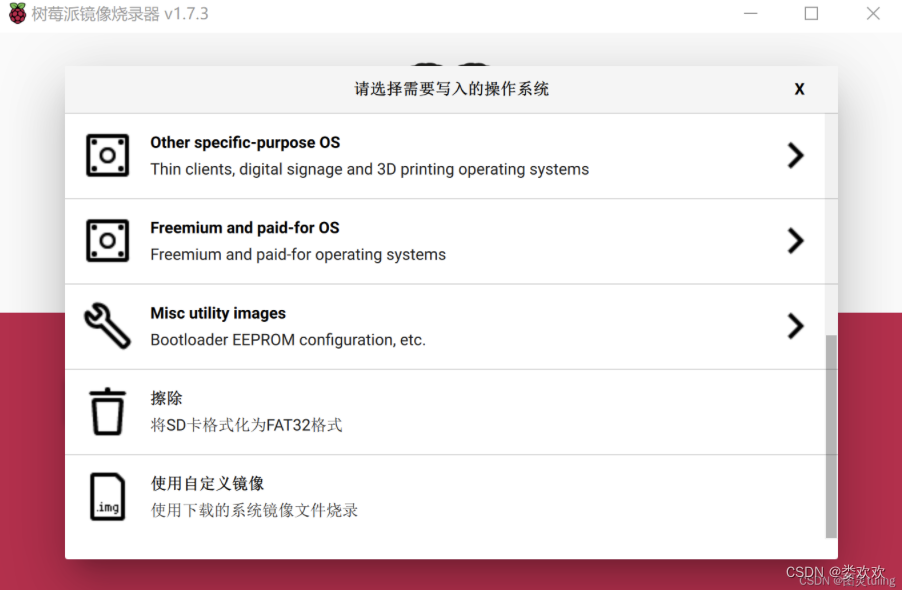
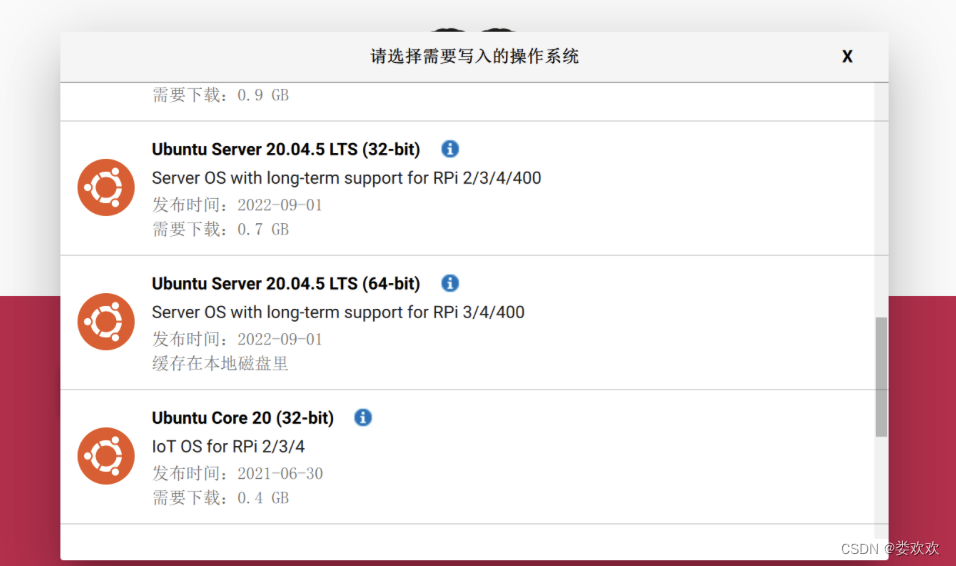
我这里是(Other general-purpose OS里的Ubuntu,版本是Ubuntu server 20.04.5 LTS(64-bit)),选择完成后会出现一个设置按钮,可以自定义设置主机名,ssh服务等(建议都设置一下)。
设置好用户名和密码,启用ssh服务,并配置好wifi
2 Wi-Fi配置
2.1 连接Wi-Fi(50-cloud-init.yaml文件(需有显示屏和键盘))
1.修改50-cloud-init.yaml文件
sudo nano /etc/netplan/50-cloud-init.yaml修改文件如下
network:
ethernets:
eth0:
dhcp4: true
optional: true
wifis:
wlan0:
optional: true
access-points:
"WiFi名":
password: "你wifi的密码"
dhcp4: true
version: 2
2 测试刚刚的网络配置
sudo netplan --debug try
3 如果有报错执行可以下面语句查看更多信息
sudo netplan --debug generate
看看记得注意一下文件代码各行空格对不对,特别是“:”后面还有一个空格!!!!
4.应用刚刚的网络配置
sudo netplan --debug apply
5.重启
sudo reboot
3 安装ubuntu桌面版
3.1 更换国内源
1 这里用小鱼大佬的一键换源(终端上的中文打印不出来,可以在虚拟机同步运行小鱼大佬的一键换源对比)tip:这里的-O是大写的O
wget http://fishros.com/install -O fishros && . fishros
2 按照提示一键换源后,完成更新
sudo apt update
sudo apt upgrade
3.2 安装ubuntu桌面版
1 安装
sudo apt install ubuntu-desktop2 等待很久
3 重启
sudo reboot
4 ROS安装
ros也用小鱼大佬的一键安装
wget http://fishros.com/install -O fishros && . fishros
5 mavros安装
采用官网二进制安装
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.shchmod a+x install_geographiclib_datasets.sh sudo bash ./install_geographiclib_datasets.sh安装好之后,用树莓派与PX4连接,运行
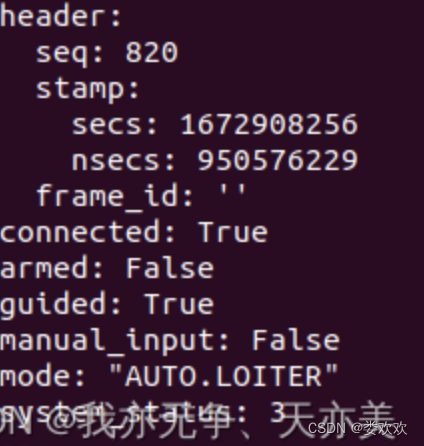
roslaunch mavros px4.launch再运行
rostopic echo /mavros/state检测是否连接,若connected 为 ture 则连接成功。


















 2642
2642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









