






分类任务:
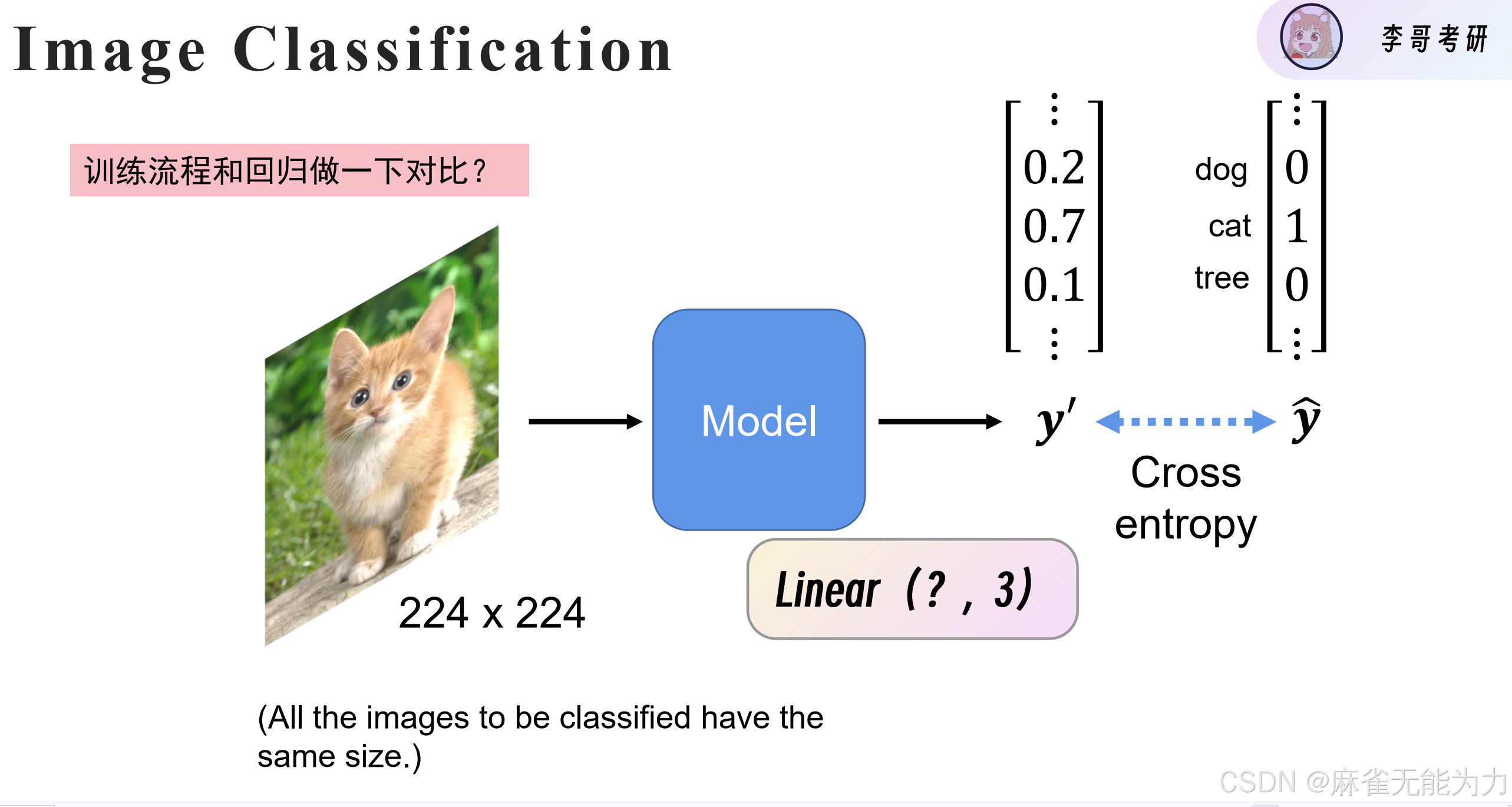
回归任务和分类任务的区别:
为什么分类任务不用一个输出值:
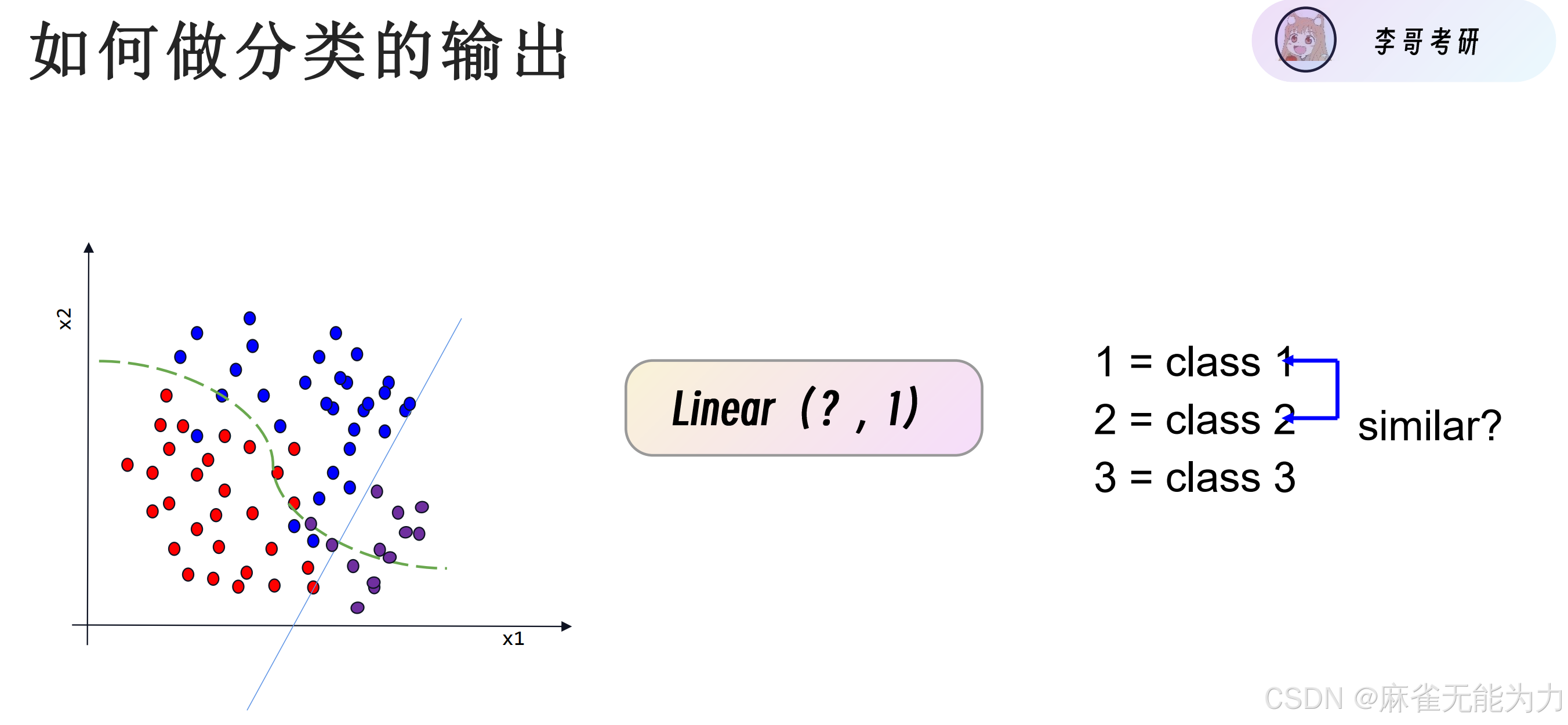
因为在一个连续的数轴上,利用预测值和类别值更近的方法各个类别与预测点的距离各不相同,即各个类别不等价。在分类任务中只有是和不是的区别,没有哪一个更像的区别。
如何分类输出
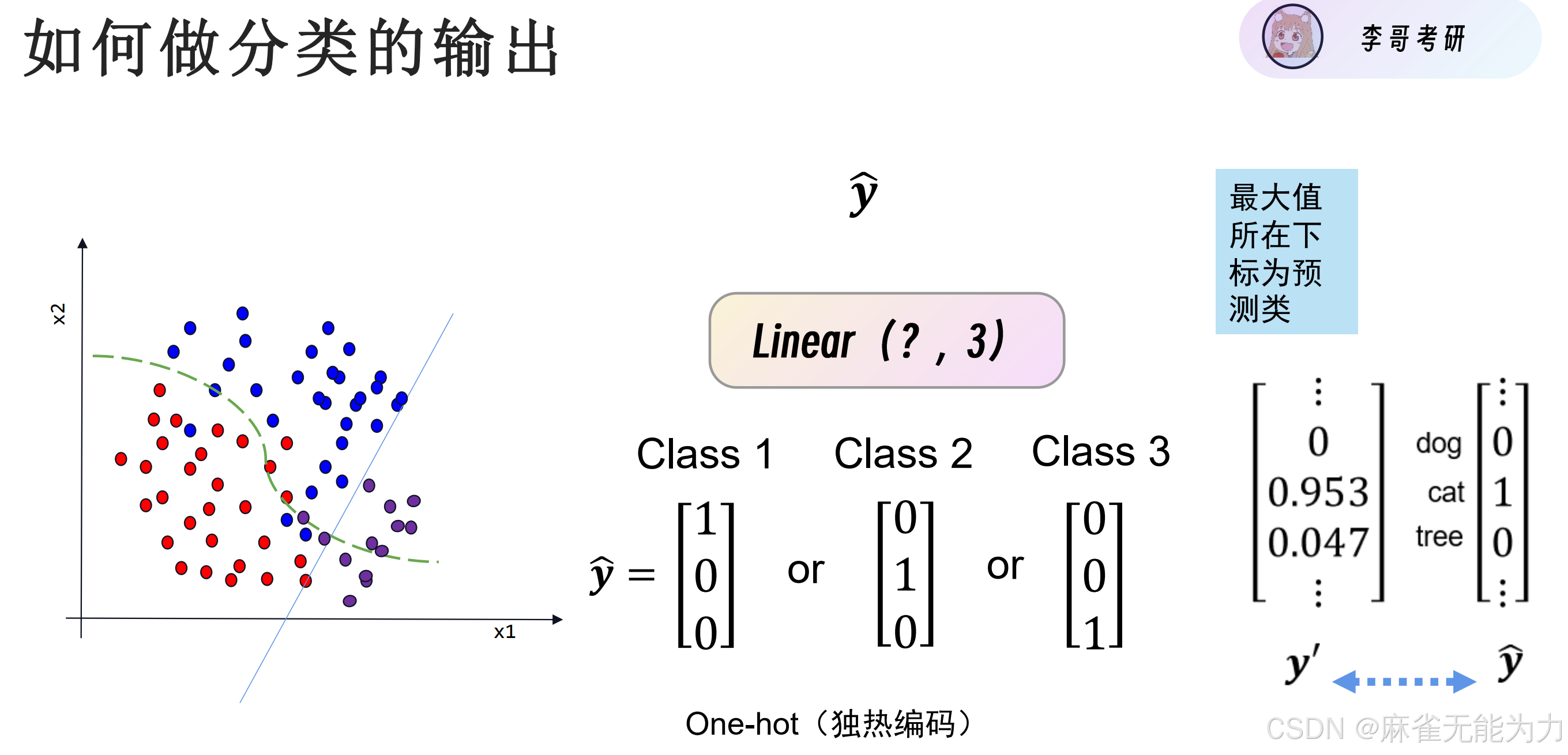
有几个类就要有几个输出
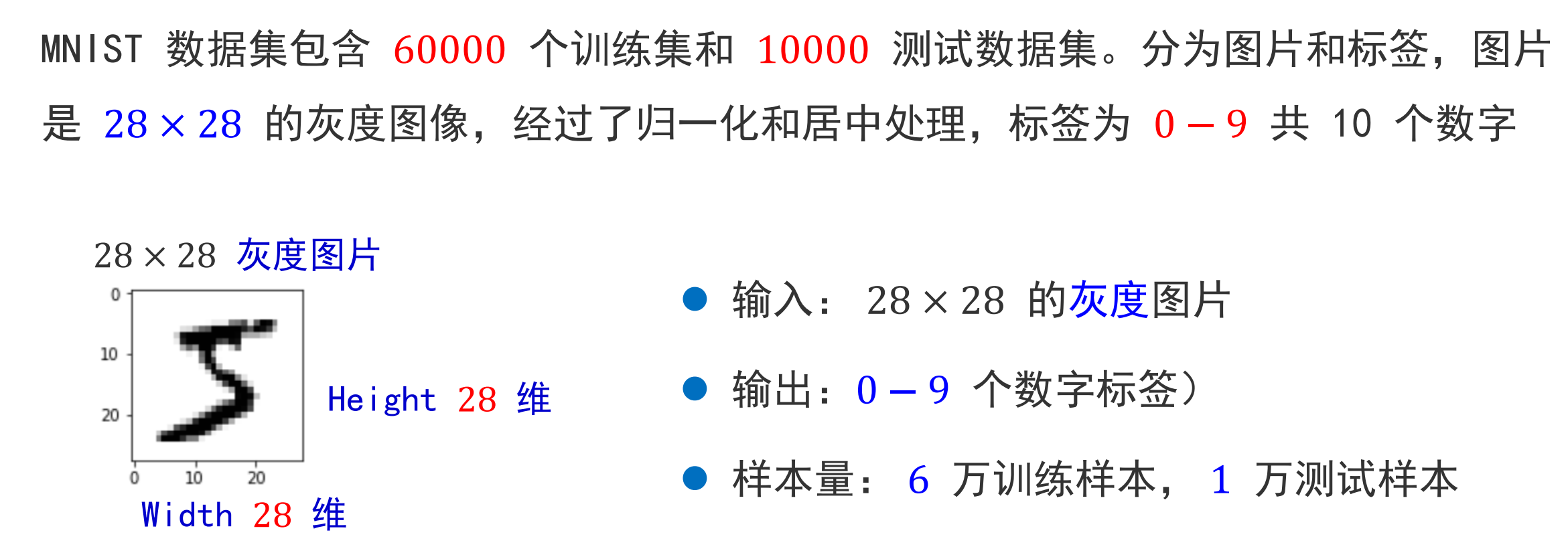
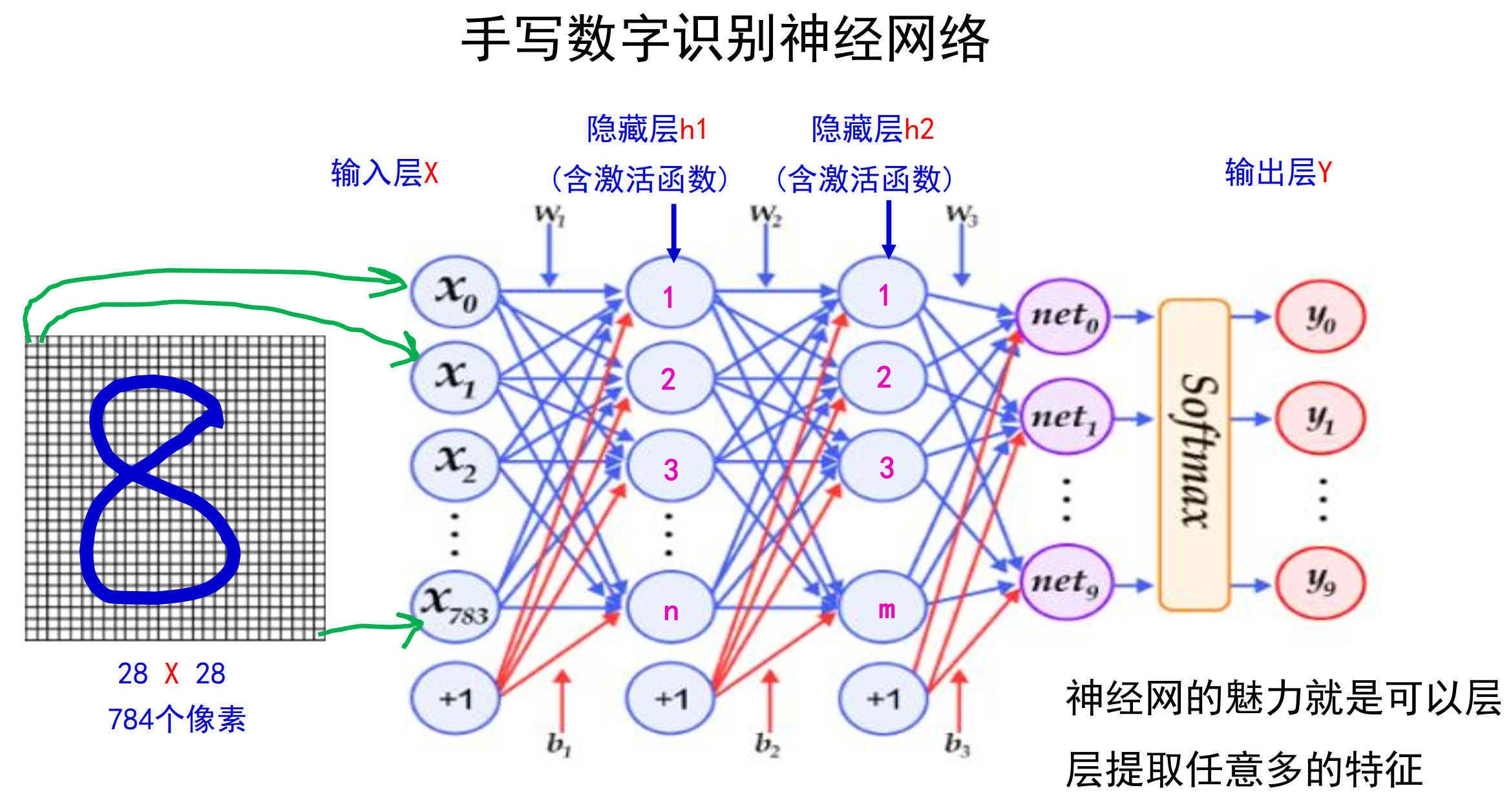
图像识别初步:手写数字识别
该部分代码通过A飞浆ai studio实现,完整代码将置于文末
使用的库为paddle
MNIST数据集
该数据集由飞浆自带提供,可以直接使用
数据处理
#导入数据集Compose的作用是将用于数据集预处理的接口以列表的方式进行组合。
#导入数据集Normalize的作用是图像归一化处理,支持两种方式: 1. 用统一的均值和标准差值对图像的每个通道进行归一化处理; 2. 对每个通道指定不同的均值和标准差值进行归一化处理。
from paddle.vision.transforms import Compose, Normalize
transform = Compose([Normalize(mean=[127.5],std=[127.5],data_format='CHW')])
# 使用transform对数据集做归一化
print('下载并加载训练数据')
train_dataset = paddle.vision.datasets.MNIST(mode='train', transform=transform)
test_dataset = paddle.vision.datasets.MNIST(mode='test', transform=transform)
print('加载完成')首先设定数据处理函数(该代码主要是做归一化操作)transform
最外层的Compose 的作用是将用于数据集预处理的接口以列表的方式进行组合。实际上就是将一系列图片处理的方法按顺序组合执行。
比如:
transform = Compose([
Resize((256, 256)), # 改变尺寸大小
CenterCrop((224, 224)), # 对输入图像进行裁剪,保持图片中心点不变
RandomHorizontalFlip(0.5), # 随机水平翻转
RandomRotation(degrees=15), # 旋转
Normalize(mean=[127.5],std=[127.5],data_format='CHW') # 图像归一化
])Normalize:图像归一化处理,支持两种方式: (1)用统一的均值和标准差值对图像的每个通道进行归一化处理;(2)对每个通道指定不同的均值和标准差值进行归一化处理

这里取127.5是因为是255 / 2 = 127.5
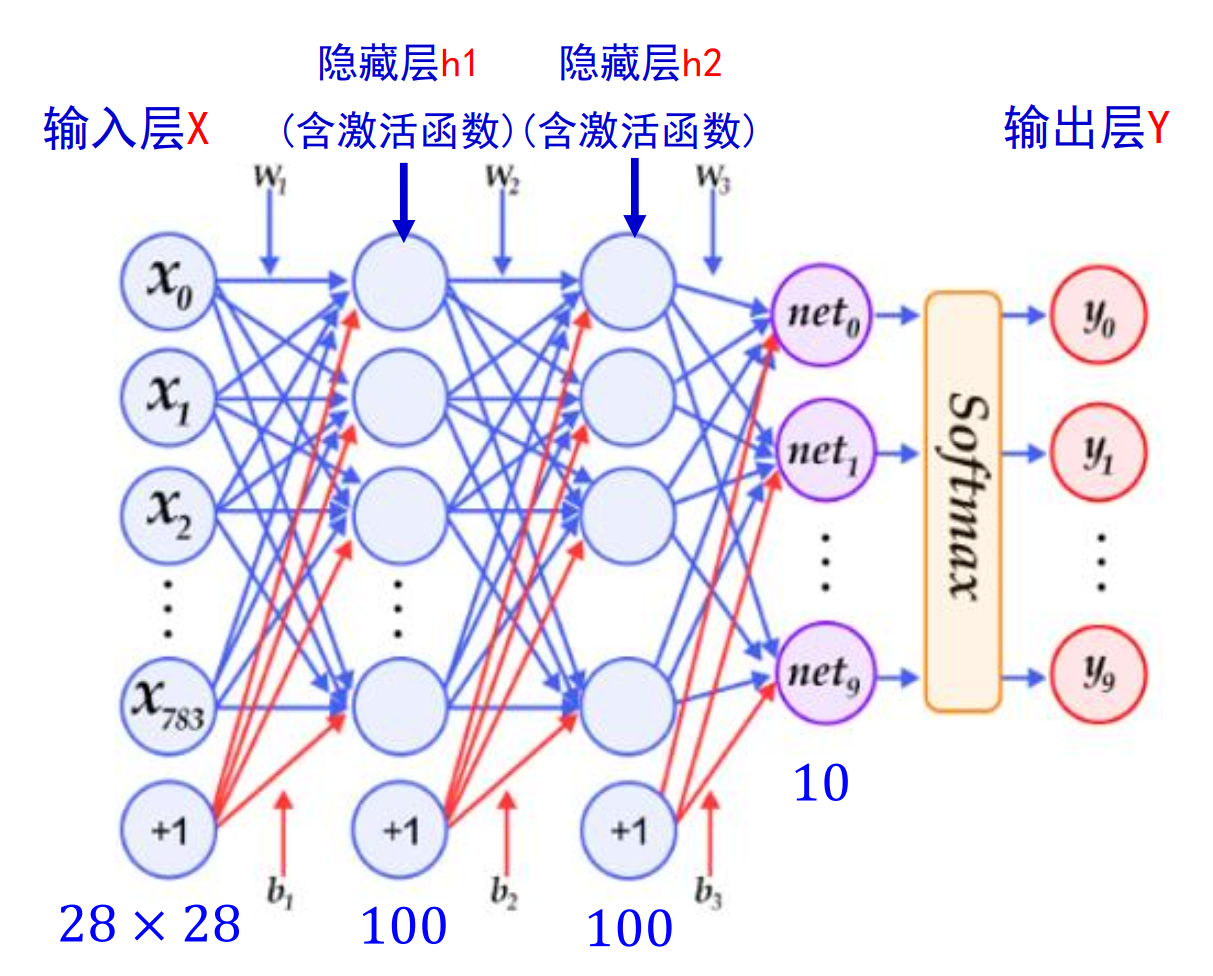
定义多层感知机
模型结构:
# 定义多层感知器
#动态图定义多层感知器
class mnist(paddle.nn.Layer):
def __init__(self):
super(mnist,self).__init__()
self.fc1 = nn.Linear(in_features =28*28, out_features =100)
self.fc2 = nn.Linear(in_features =100, out_features =100)
self.fc3 = nn.Linear(in_features =100, out_features =10)
def forward(self, input_):
x = paddle.reshape(input_, [input_.shape[0], -1])
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.relu(x)
x = self.fc3(x)
y = F.softmax(x)
return y激活函数用relu,层与层之间运用线性结构
最后的分类头使用了softmax
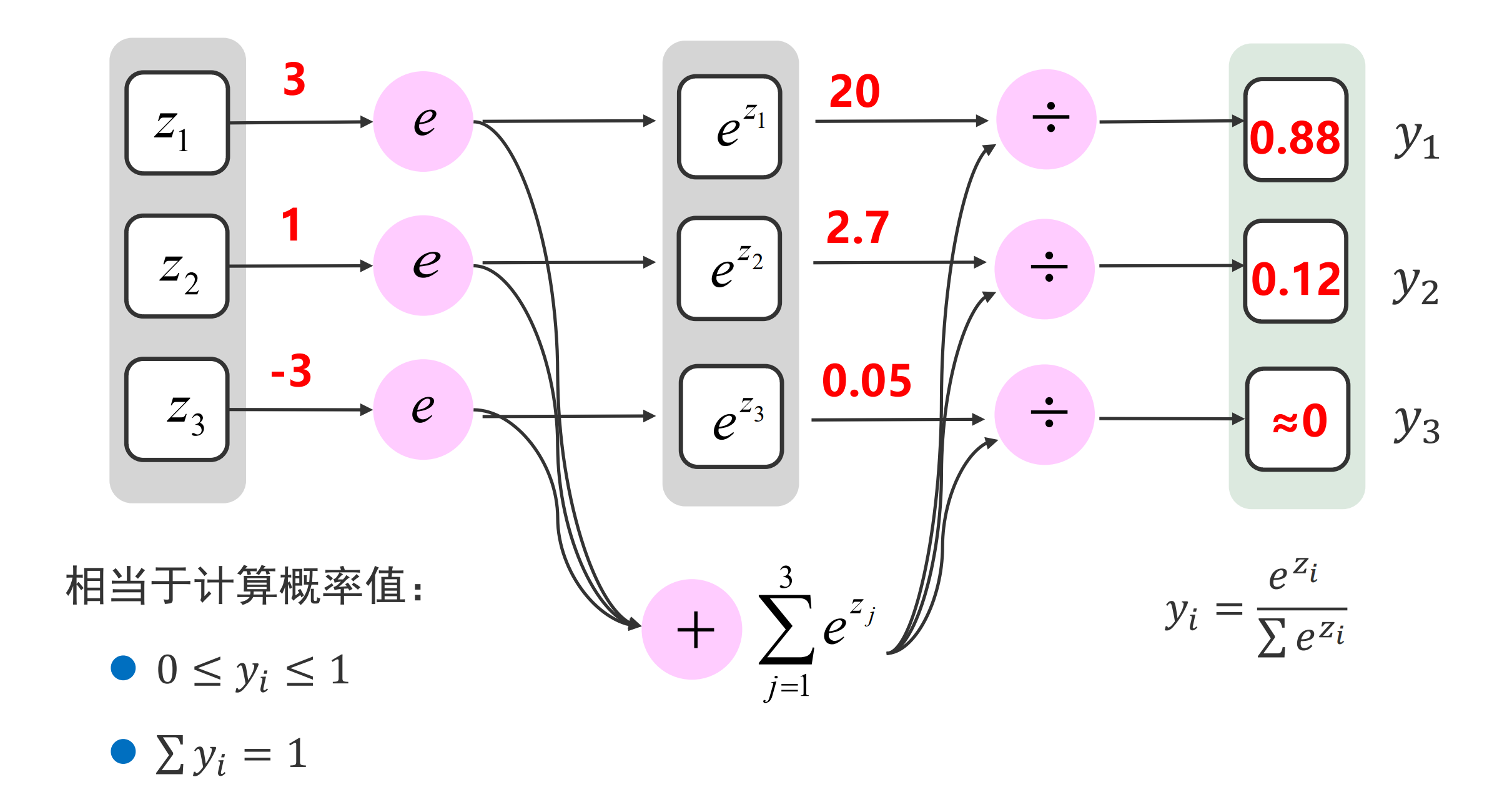
softmax
Softmax 函数也称为归一化指数函数,是逻辑函数的一种推广。它能将一个含任意实数的 K 维向量 z“压缩”到另一个 K 维实向量σ(z)中,使得每一个元素的范围都在 (0, 1)之间,并且所有元素的和为 1 。该函数多用于多分类问题中。
函数的分类原理:
封装模型和定义损失函数
from paddle.metric import Accuracy
# 用Model封装模型
model = paddle.Model(mnist())
# 定义损失函数
optim = paddle.optimizer.Adam(learning_rate=0.001, parameters=model.parameters())
# 配置模型
model.prepare(optim,paddle.nn.CrossEntropyLoss(),Accuracy())首先要将写好的类封装成模型方便后续使用
损失函数
例子:
另外优化器这里用来Adam,不是SGD
最后配置模型。
模型训练并评估
# 训练保存并验证模型
model.fit(train_dataset,test_dataset,epochs=2,batch_size=64,save_dir='multilayer_perceptron',verbose=1)最后是模型预测,这里不做展示
卷积神经网络
卷积的引入
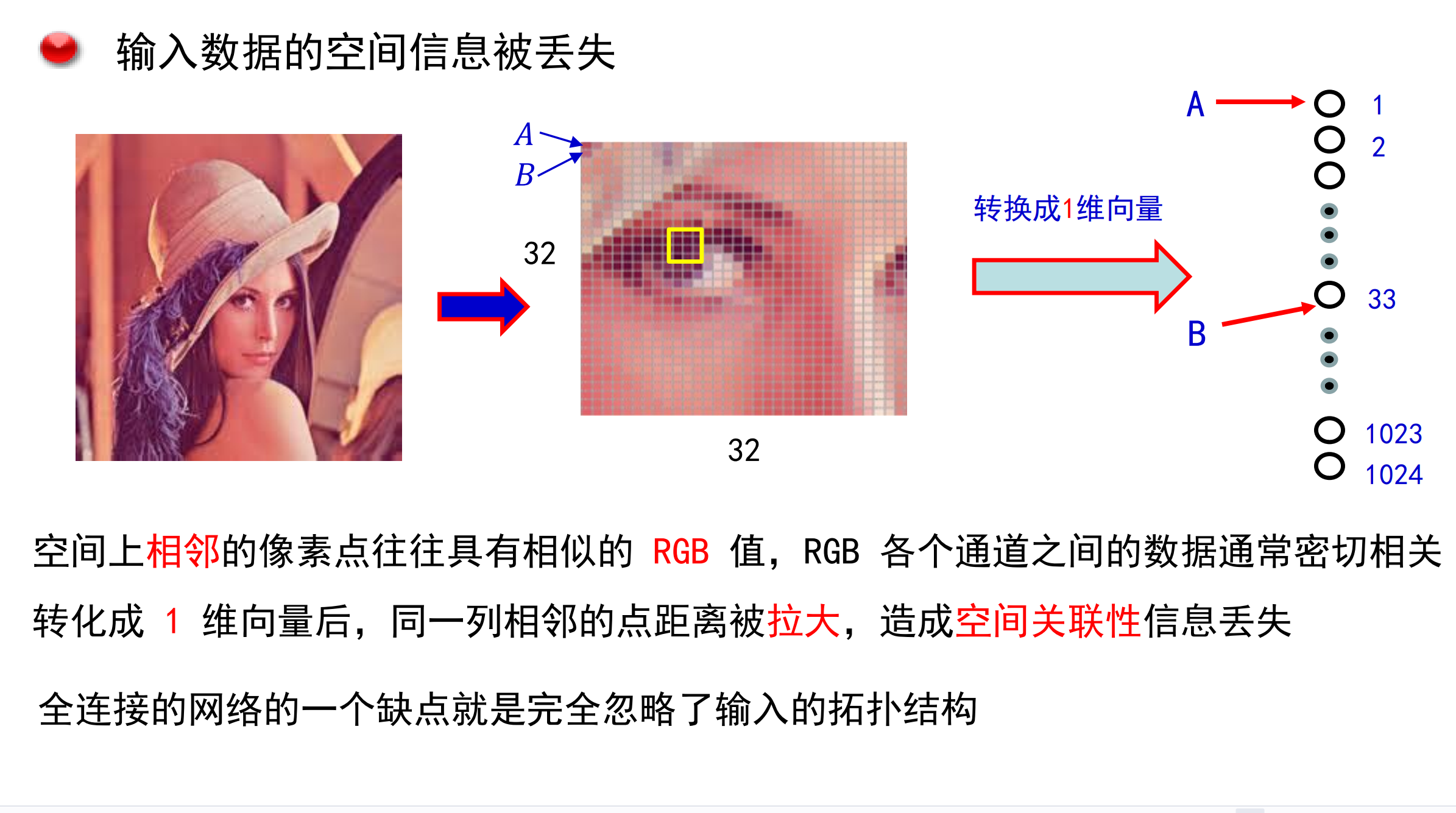
手写数字识别网络的不足:
只考虑了孤立的点没有考虑一个区域
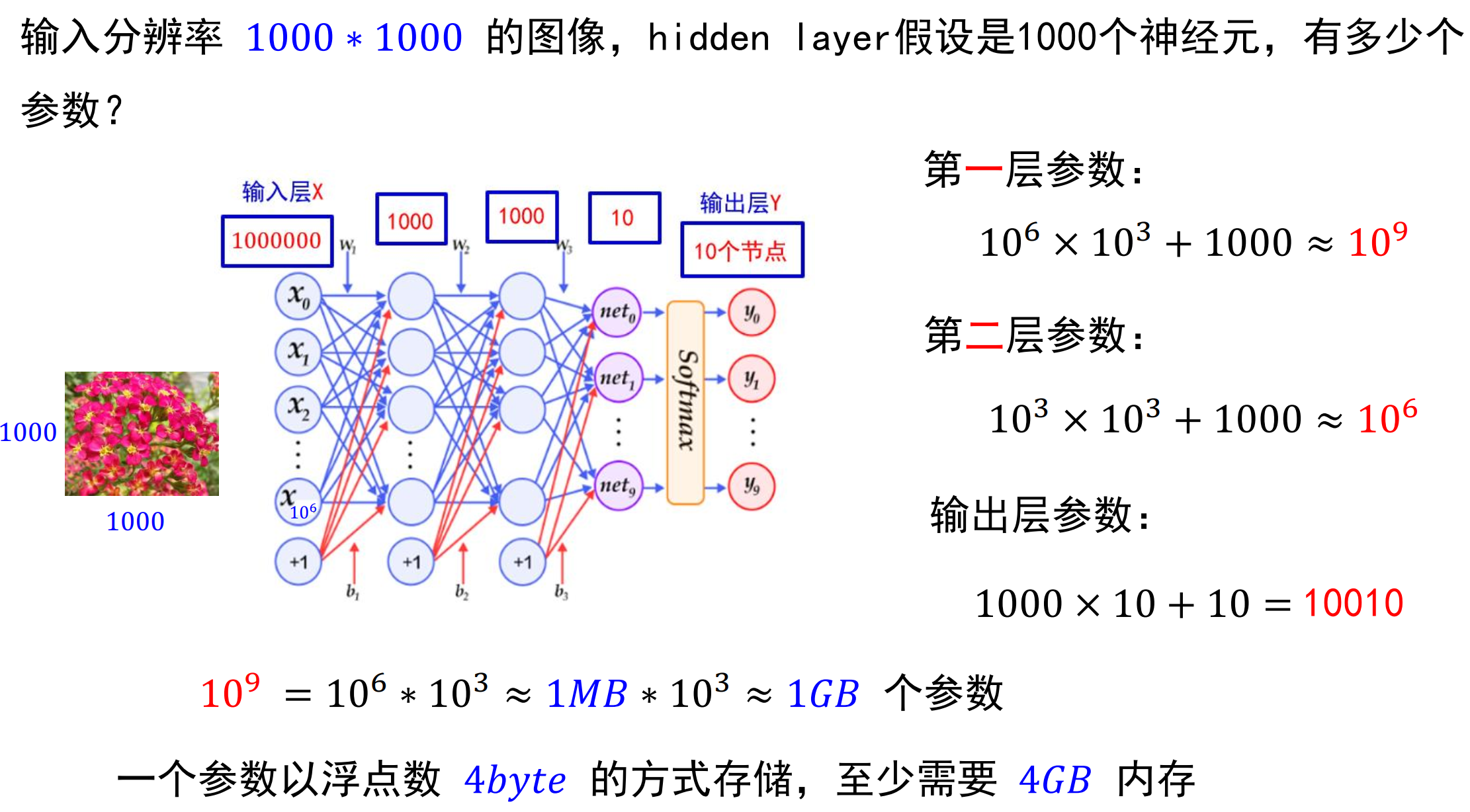
参数太多:
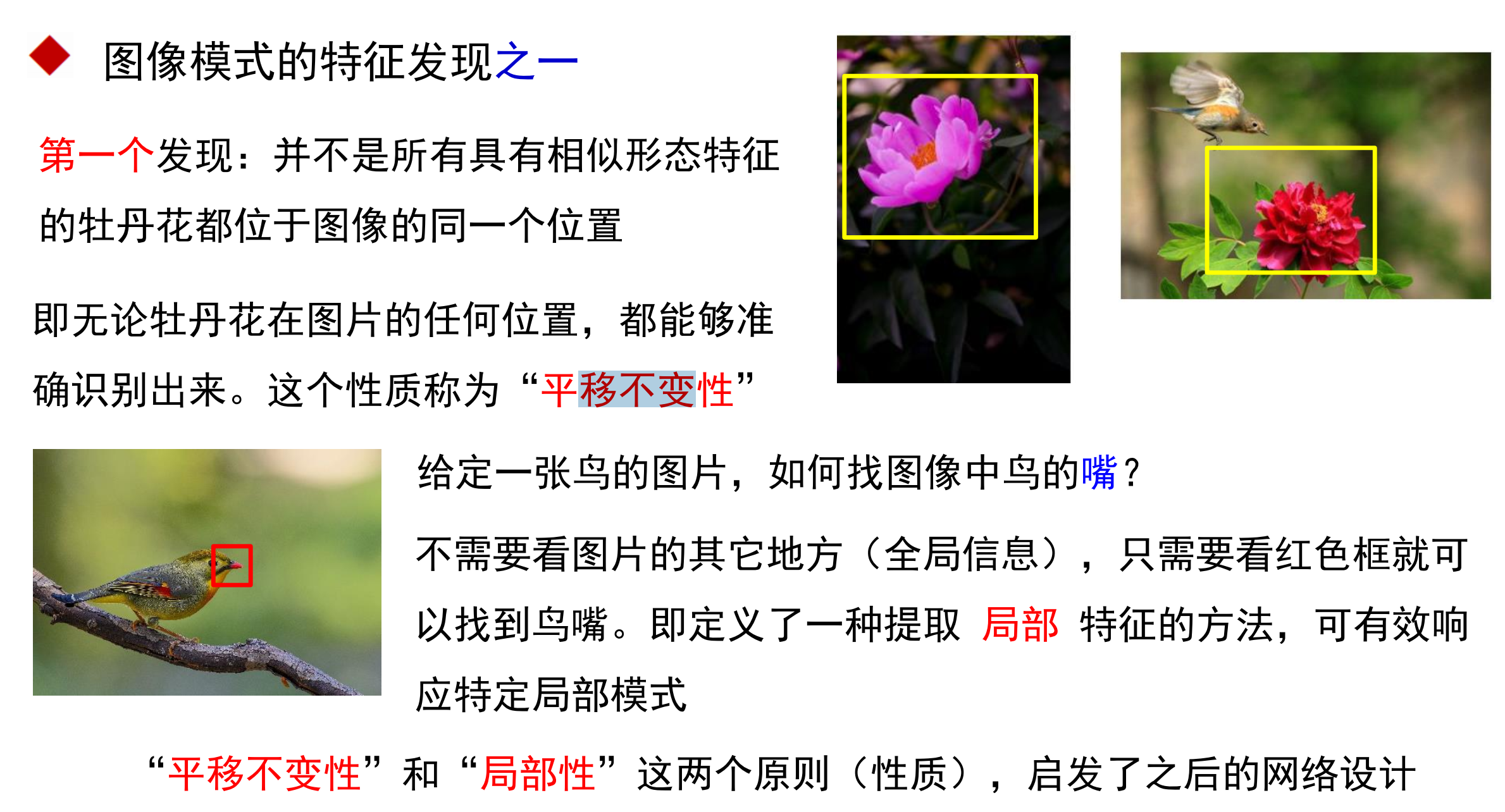
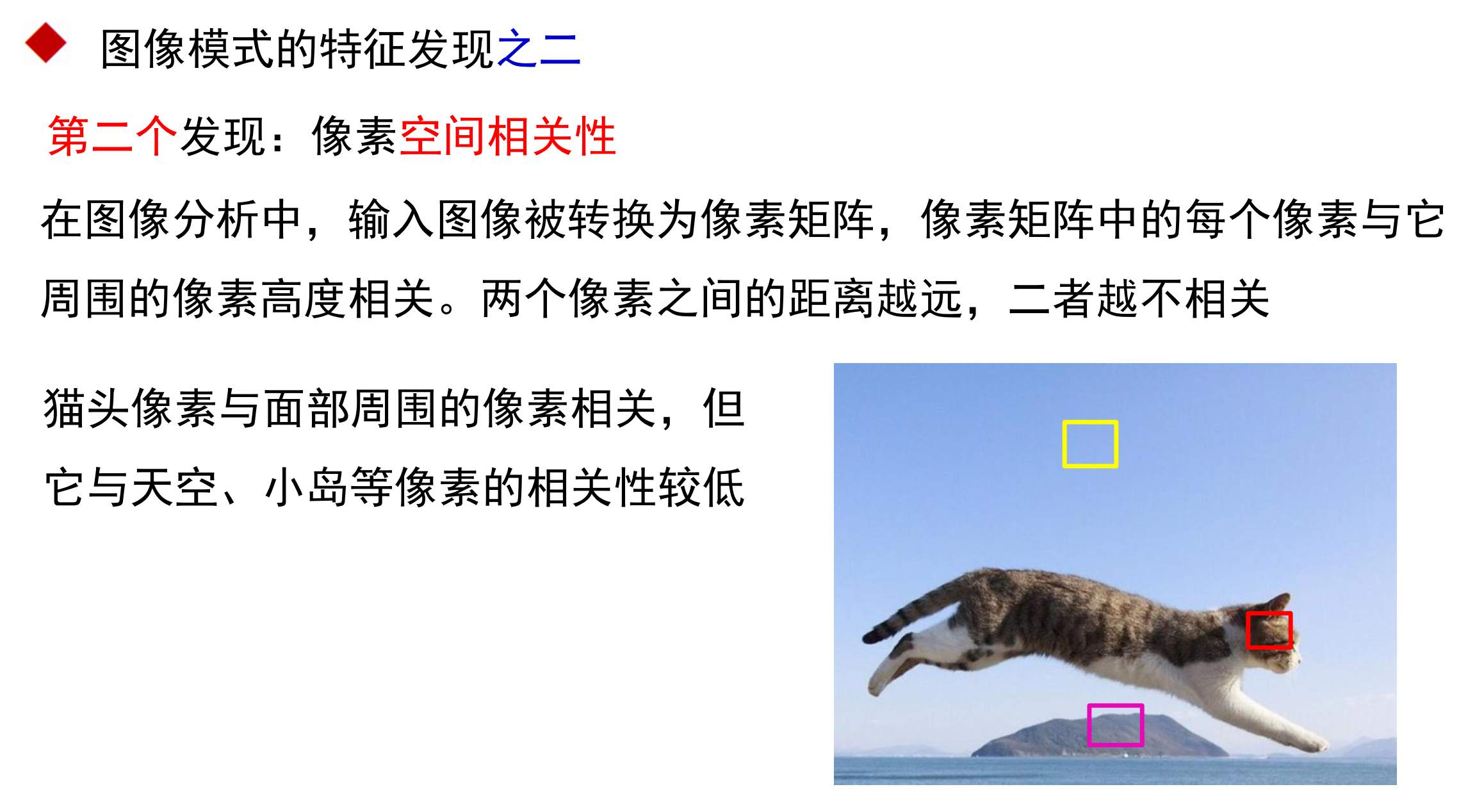
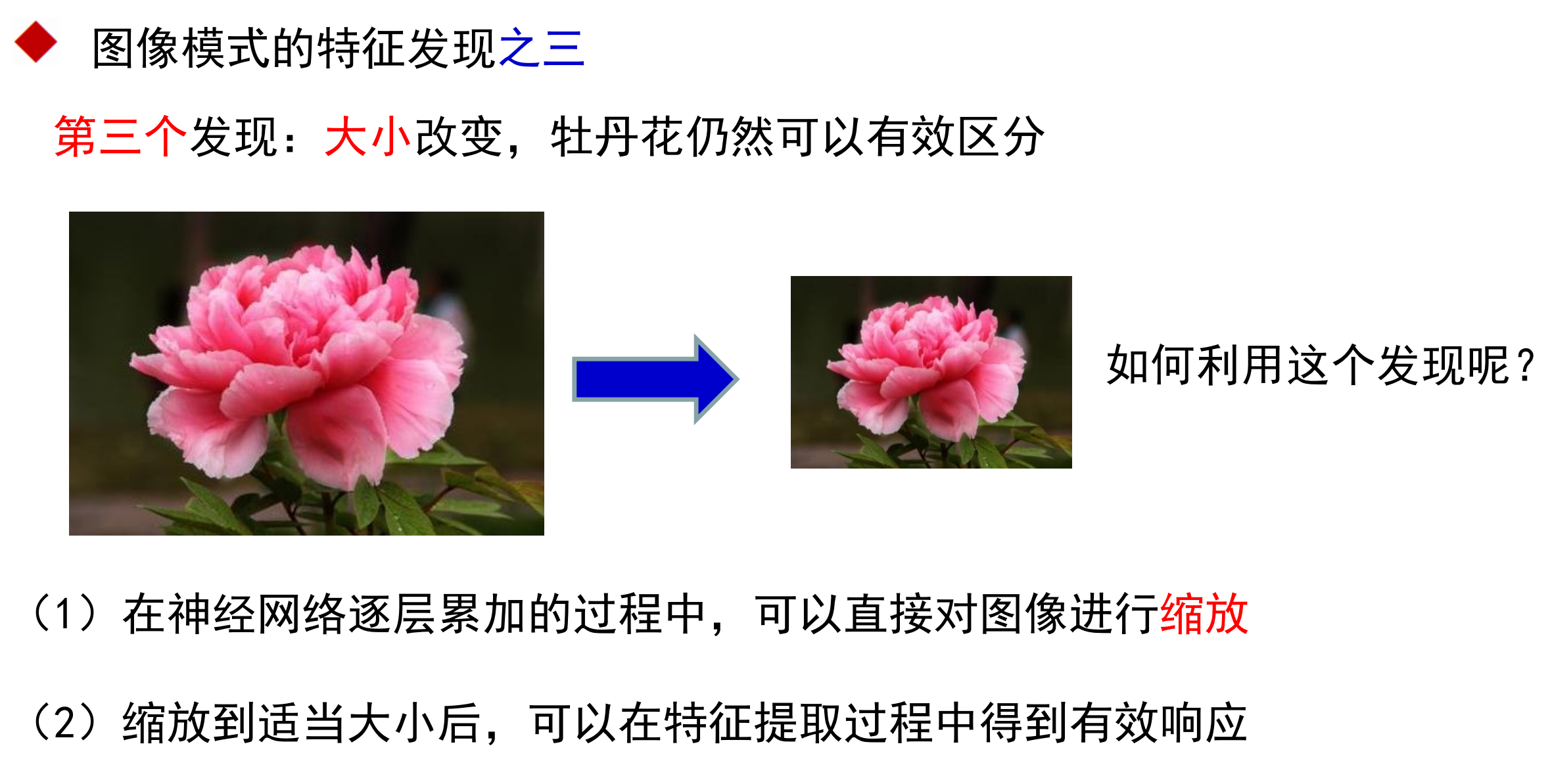
图像模型的三个特征发现
平移不变性
空间相关性
放缩
卷积神经网络由此提出。
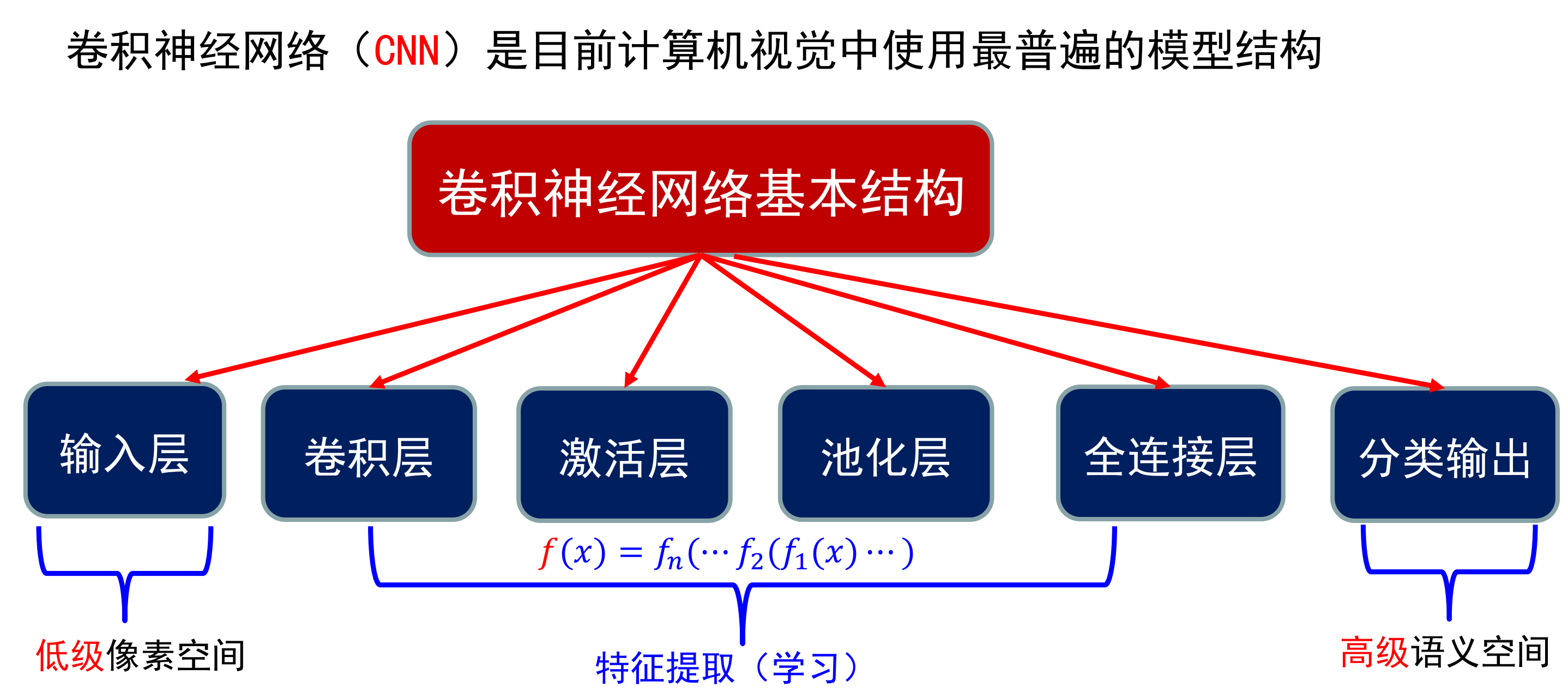
卷积神经网络的原理
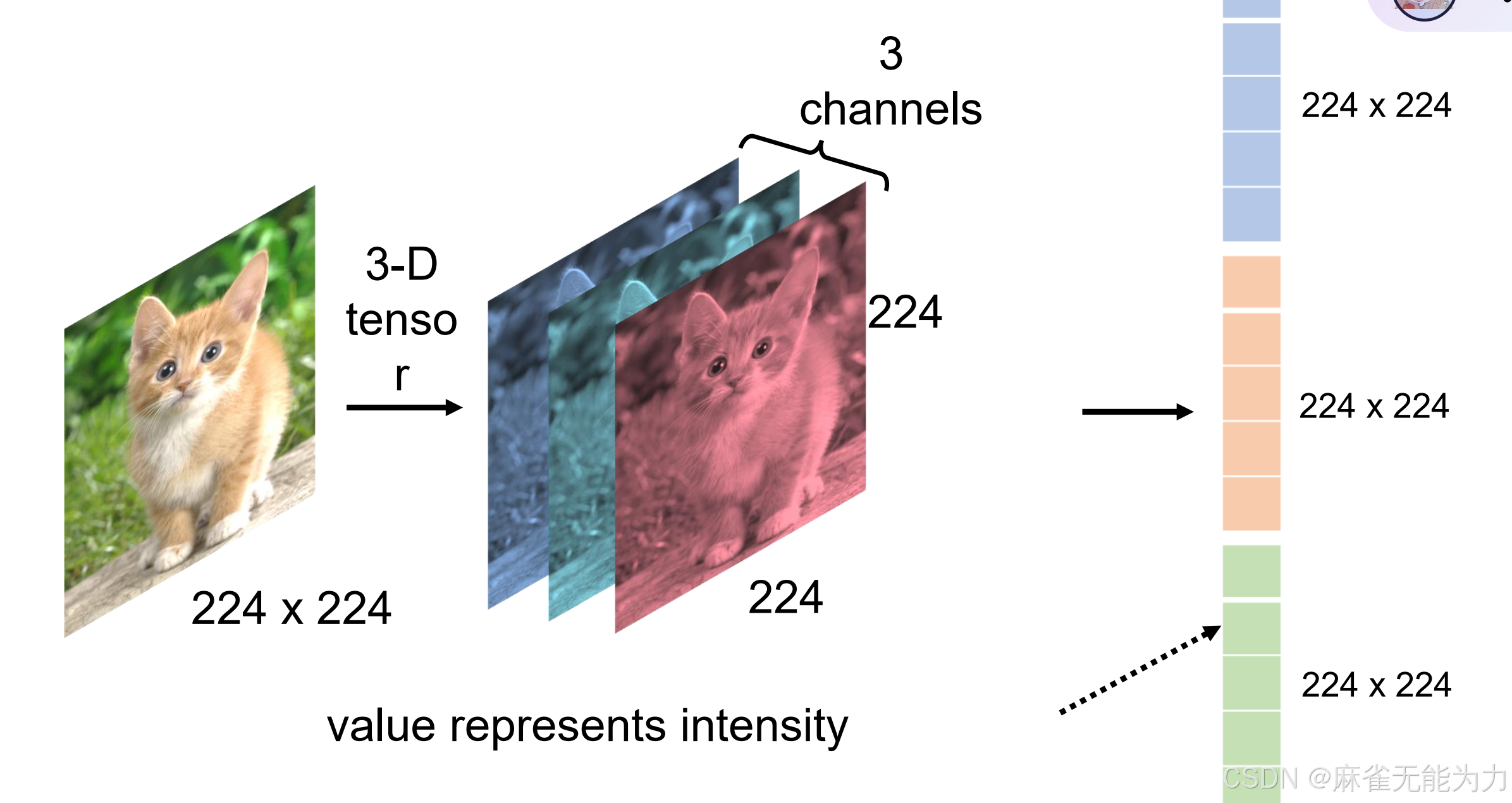
图片是矩阵:
直接将图片转化为矩阵展开数据过大,非常容易过拟合。
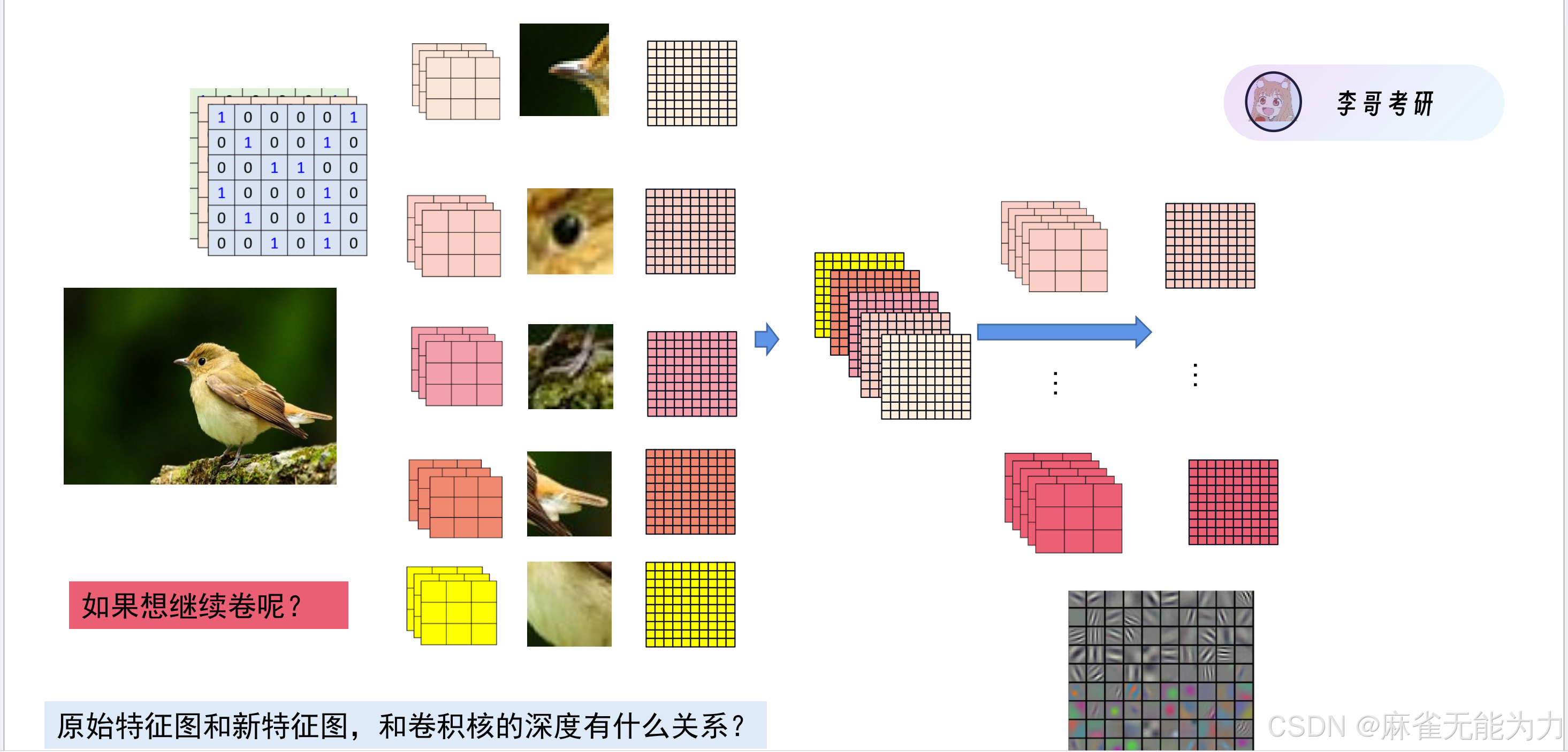
卷积神经网络的过程图:
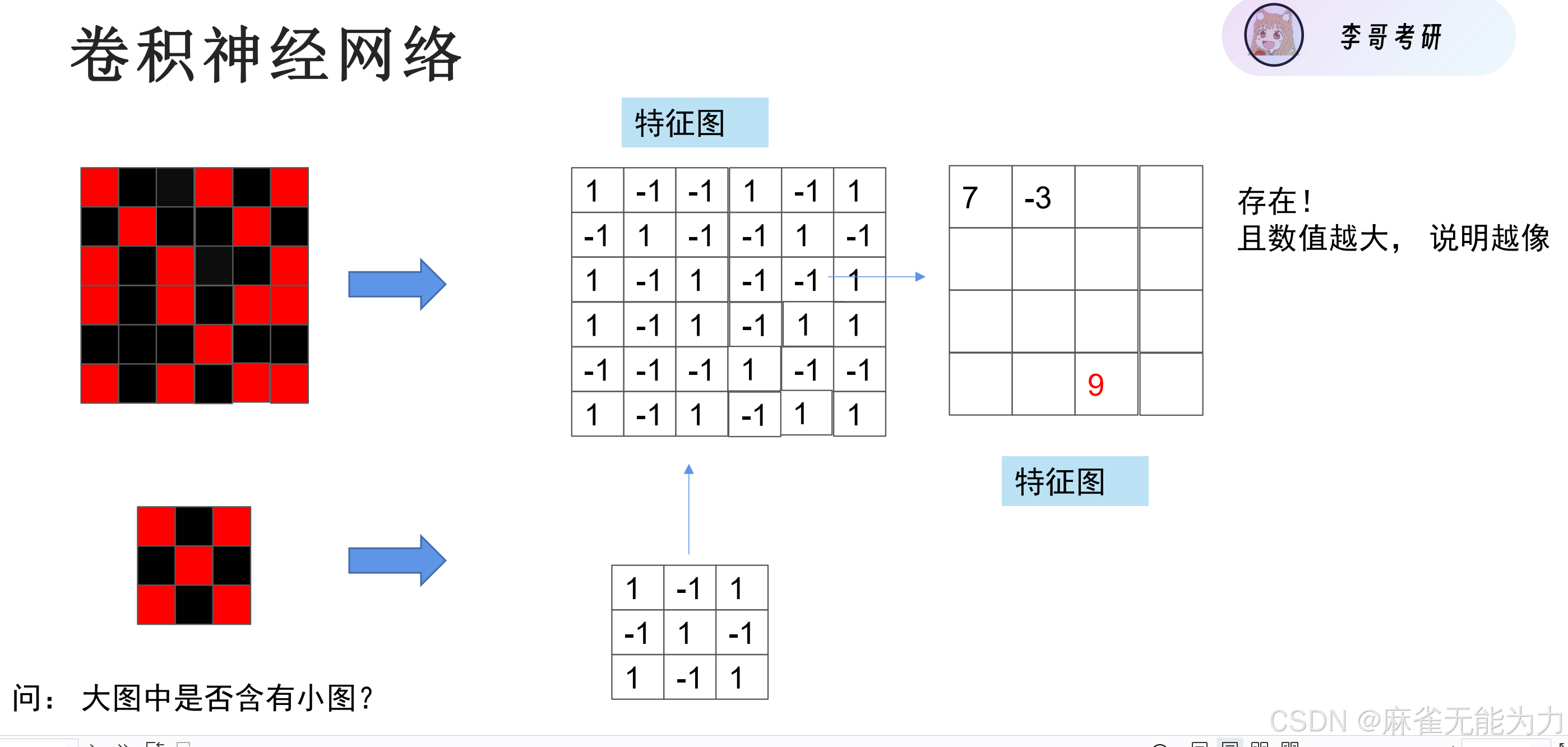
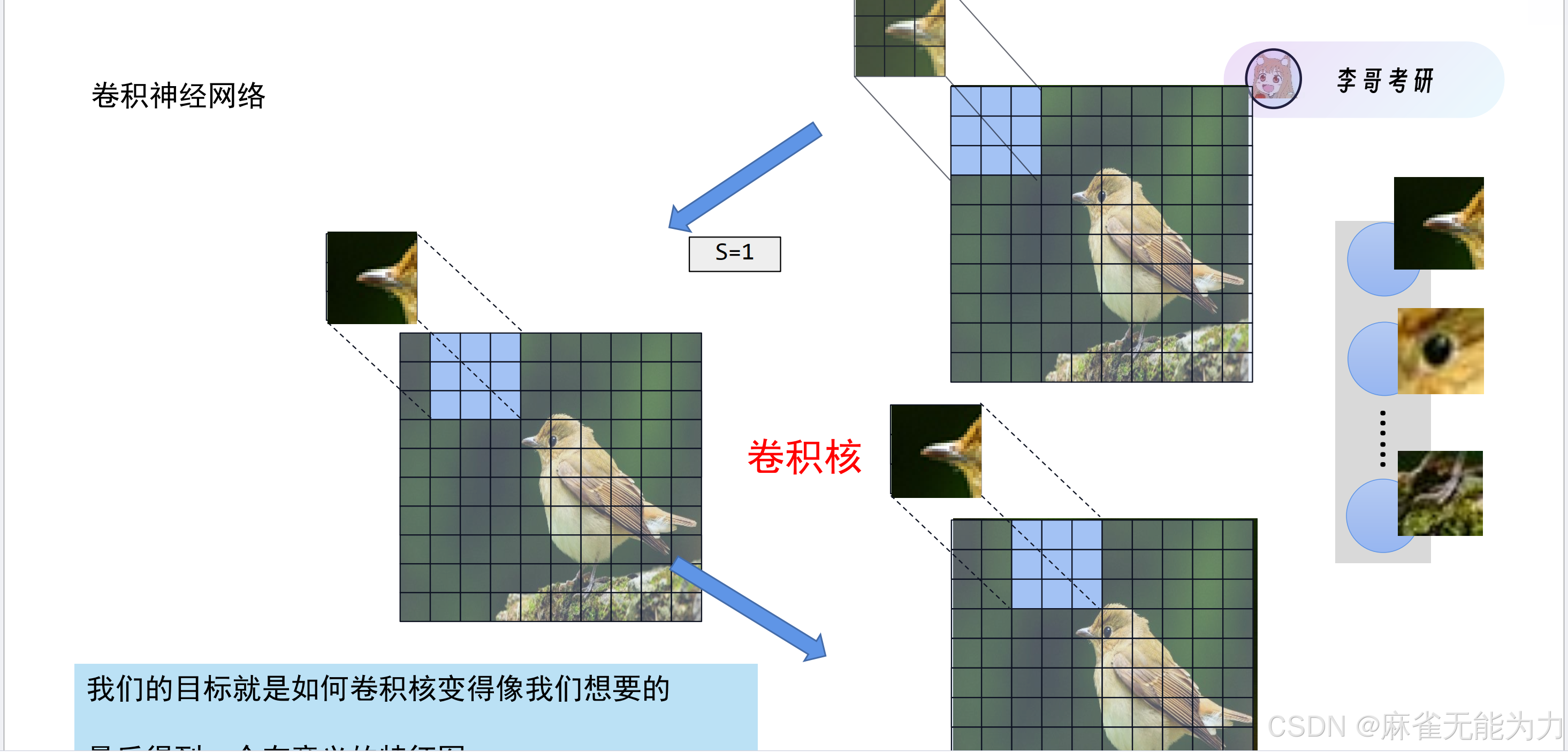
卷积核
什么是卷积核
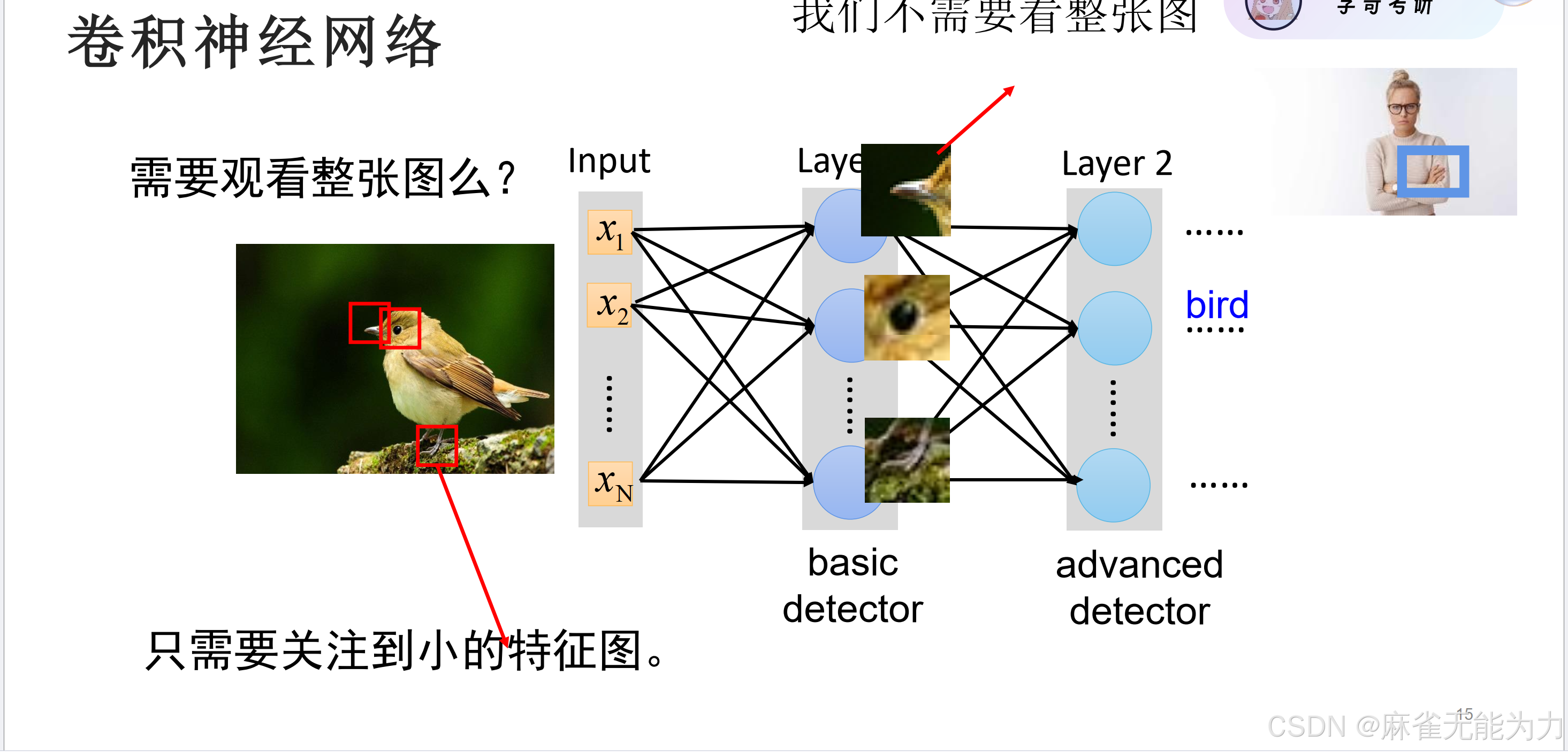
比如在这张鸟的图片中,鸟嘴,鸟眼就可以当成一个卷积核。
注意,这里只考虑了输入的通道为1的情况,所以卷积核是一个矩阵,而输入的通道往往很多,因此卷积核应是一组矩阵。
感受野
每一个特征图上像素对于原图的感知范围就是感受野
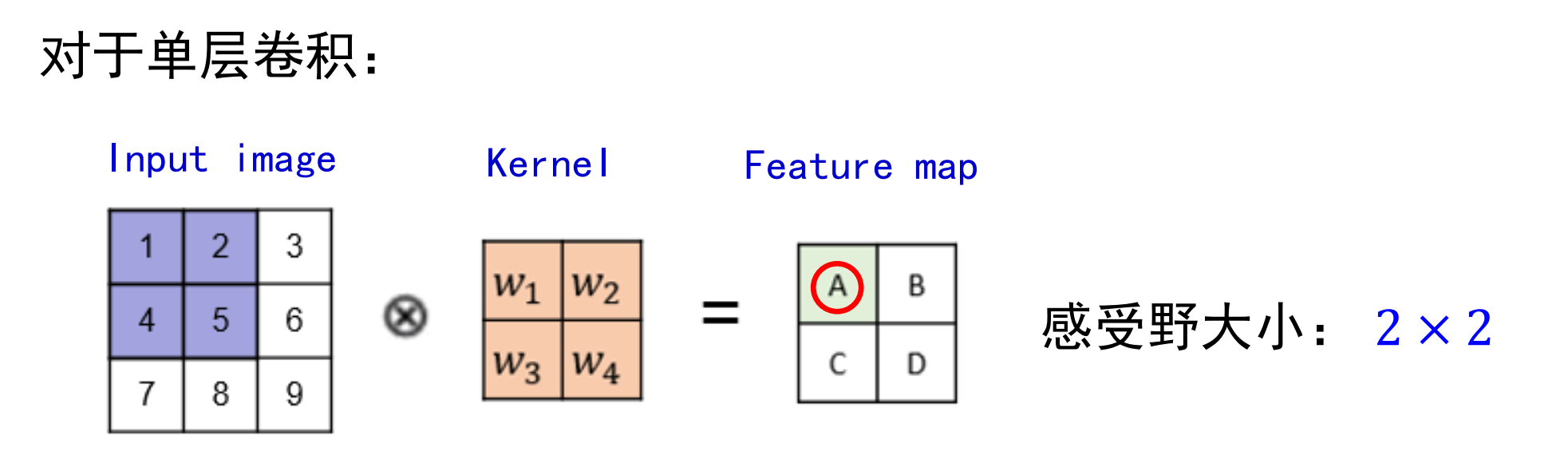
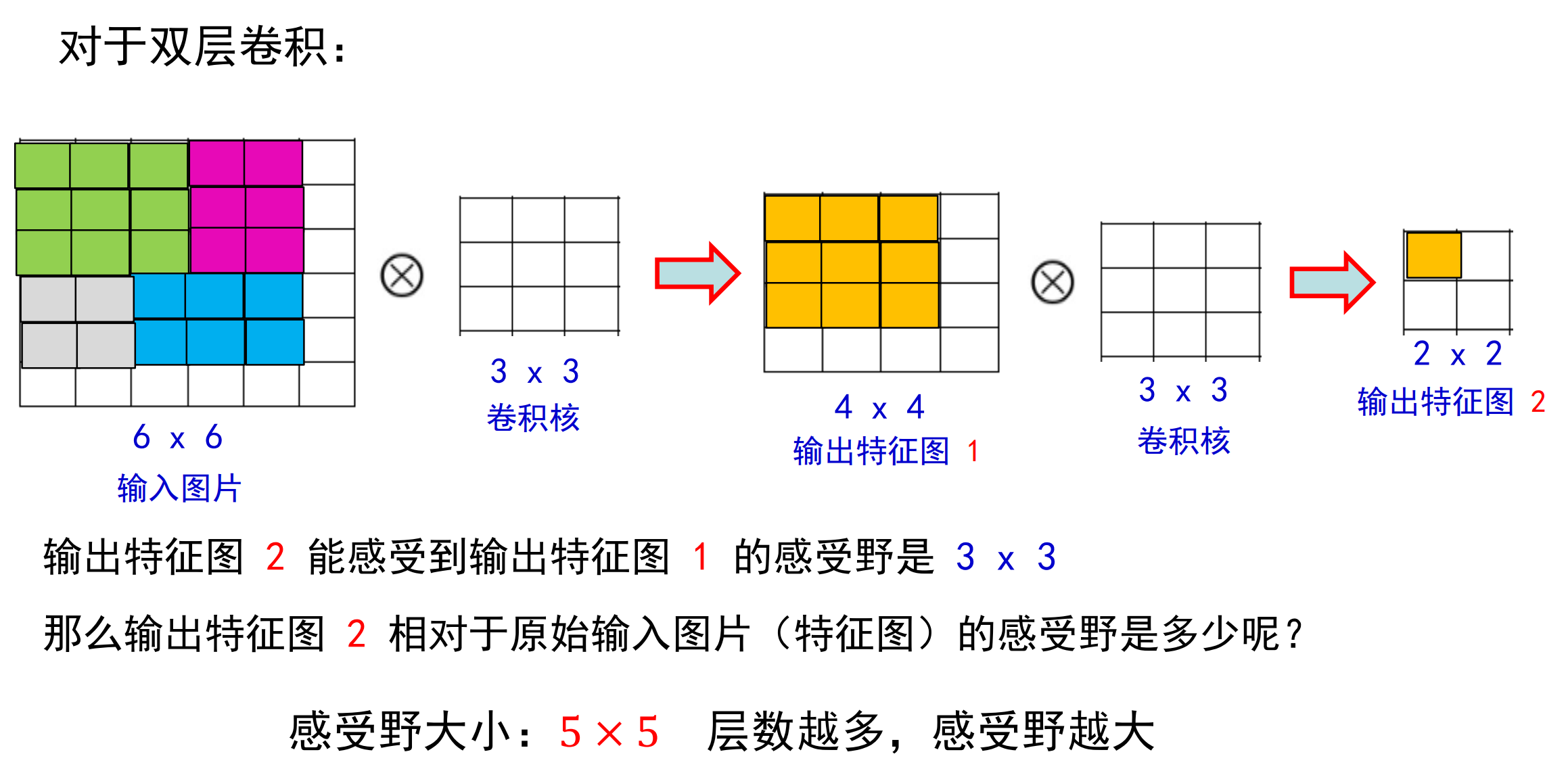
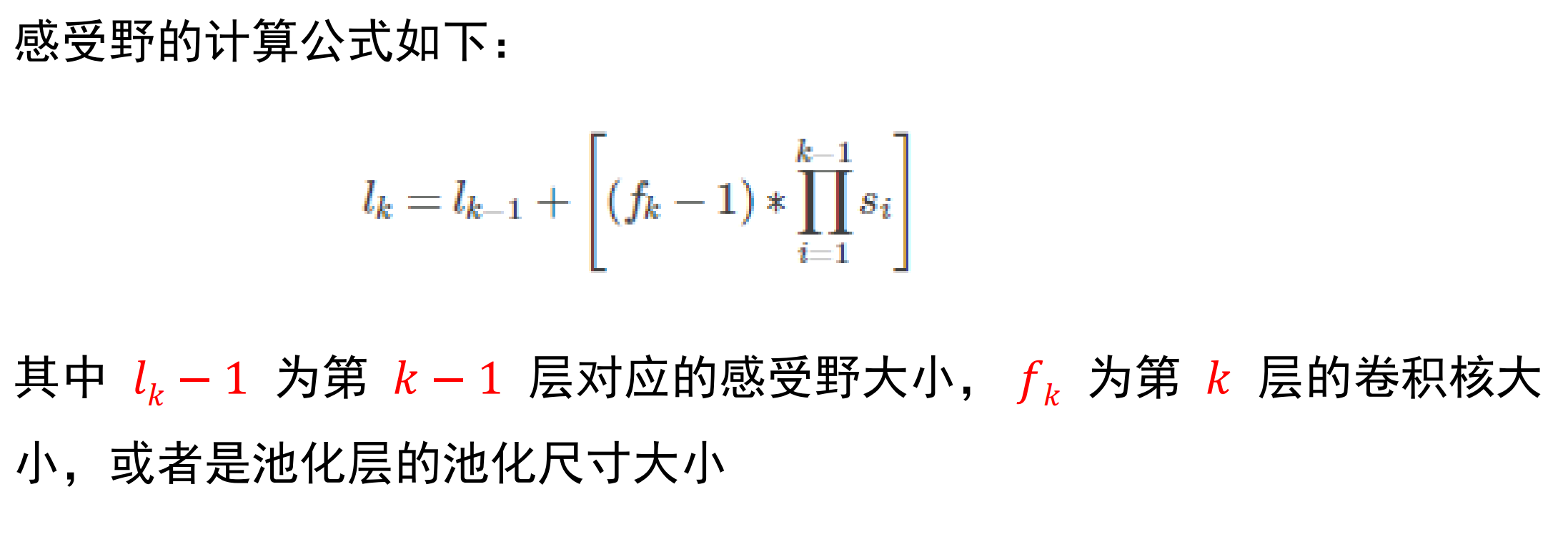
其中s依然代表步长,下图是一个感受野计算的例子
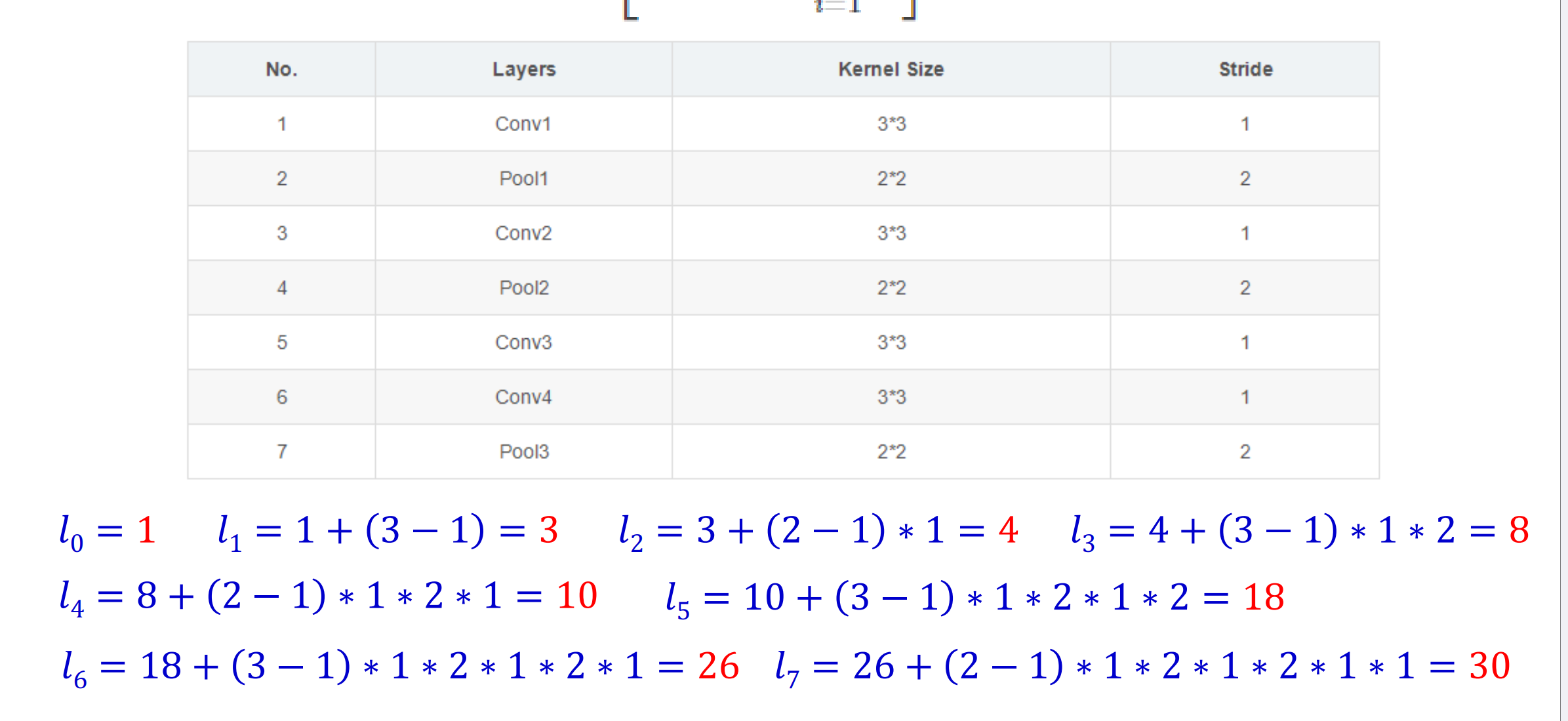
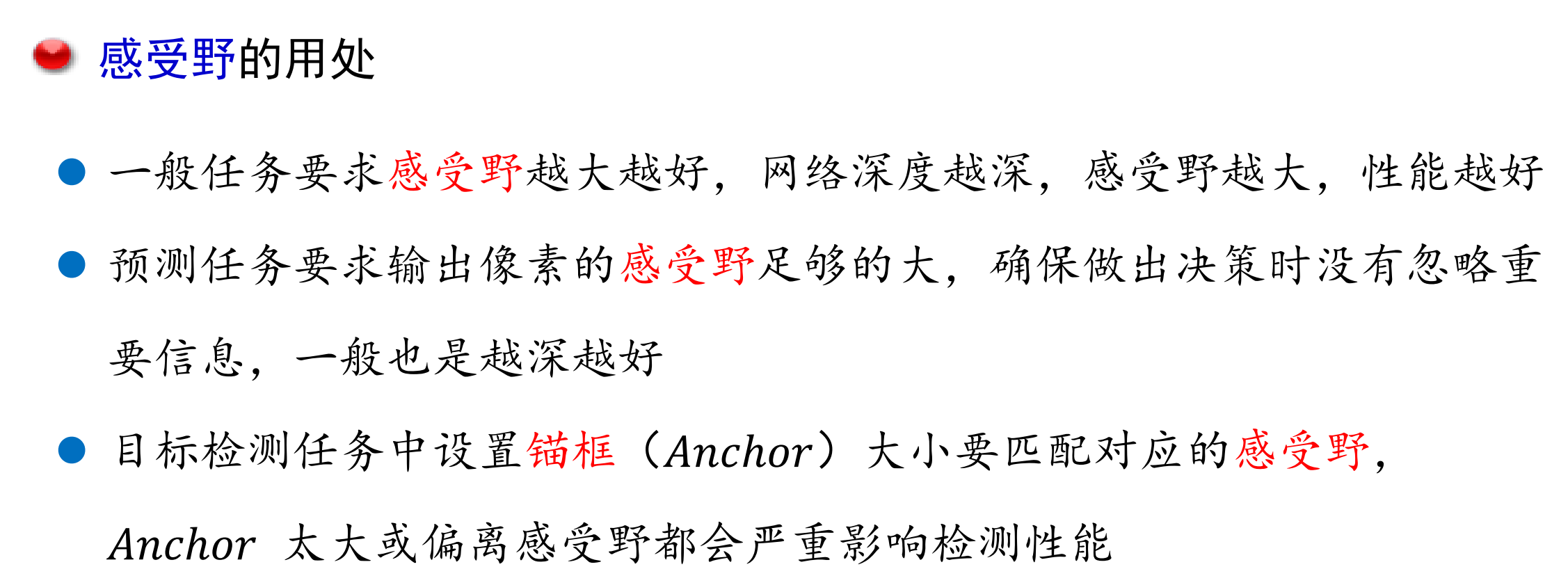
总之:卷积计算等于特征抽取
卷积神经网络的结构
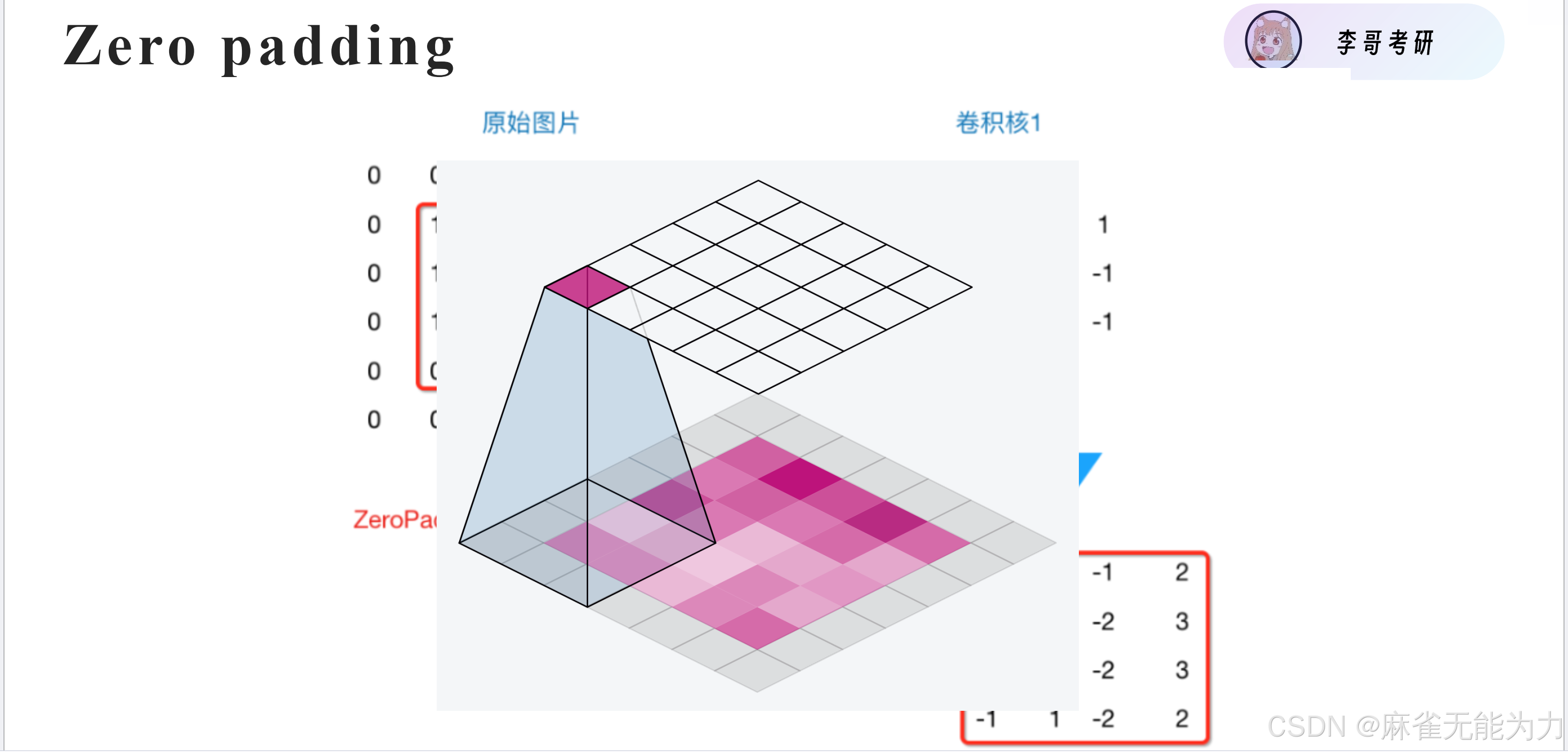
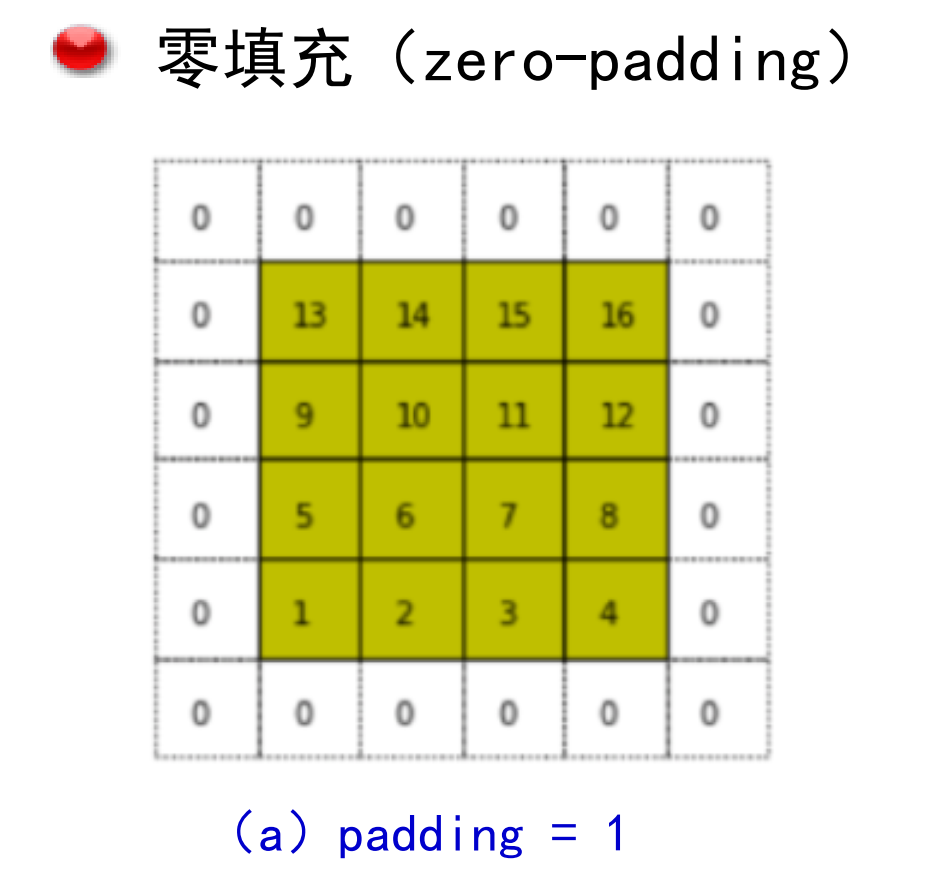
填充
使用padding保持卷积后特征图大小不变:
填充的种类:

可以增加卷积和的大小和卷积核数量,增减训练的参数:
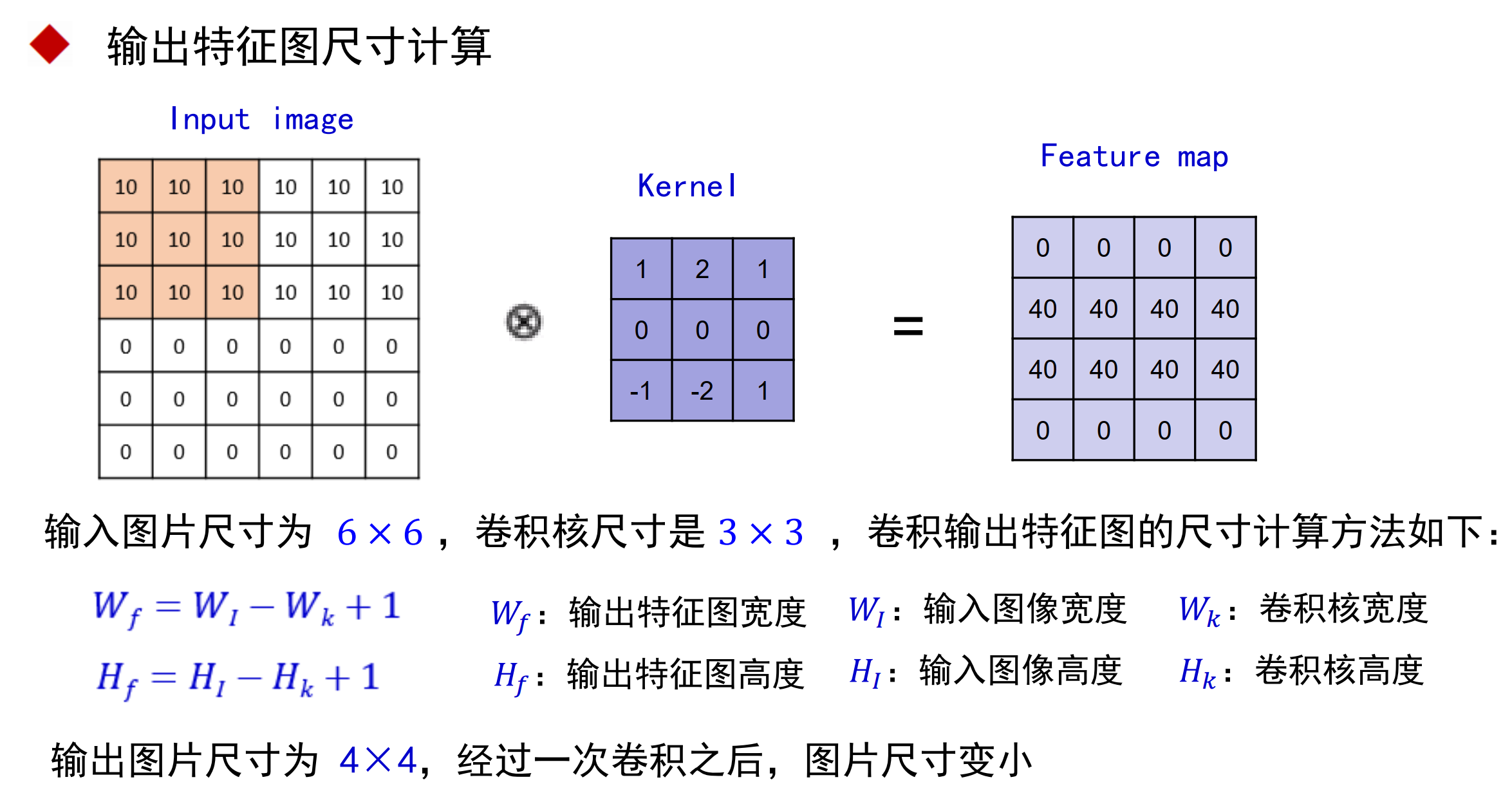
1.特征图长宽计算公式:
I:输入特征图长度
k:卷积核长度
O:输出特征图长度:
padding直接加在输入特征图上
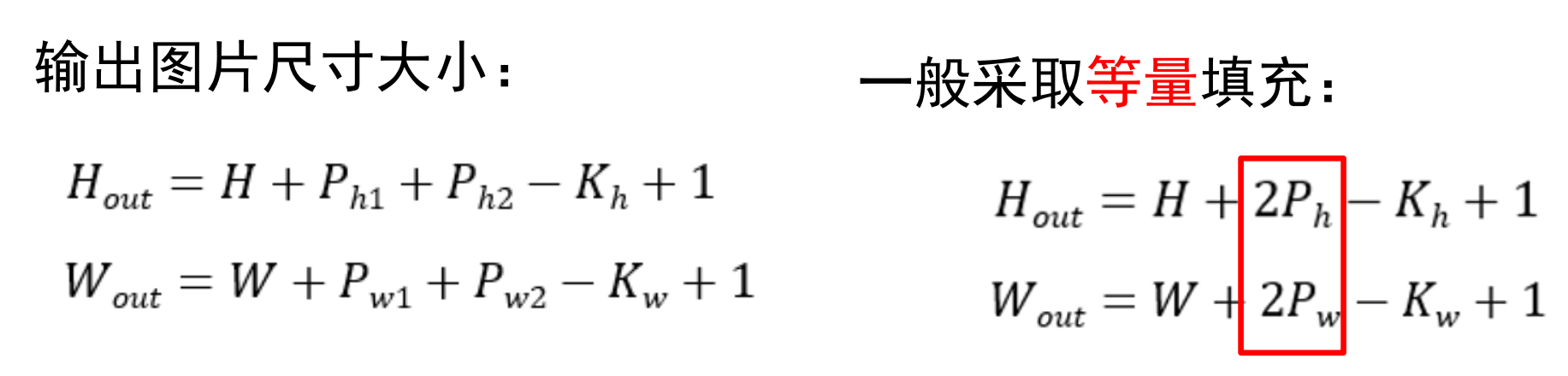
2.由上面的公式得出一下结论
若该公式成立,则 I = O即输入特征图与输出特征图大小不变
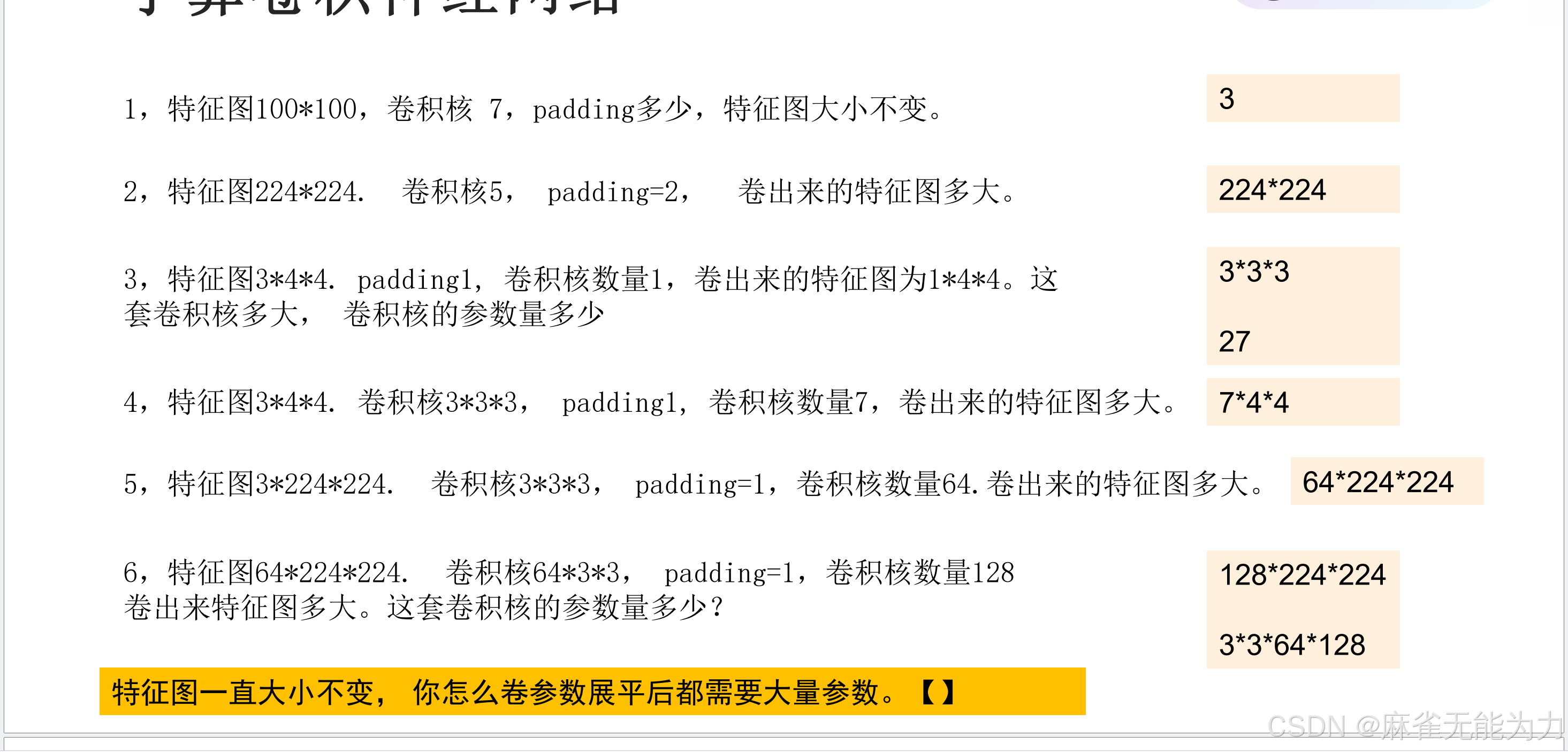
3.一层卷积核参数的计算公式:
卷积核数量*卷积核层数*卷积核高度*卷积核宽度
以下是练习题:
降低特征图尺寸的方法:
特征图尺寸过大会使参数过多,有以下两种方式降低特征图的尺寸
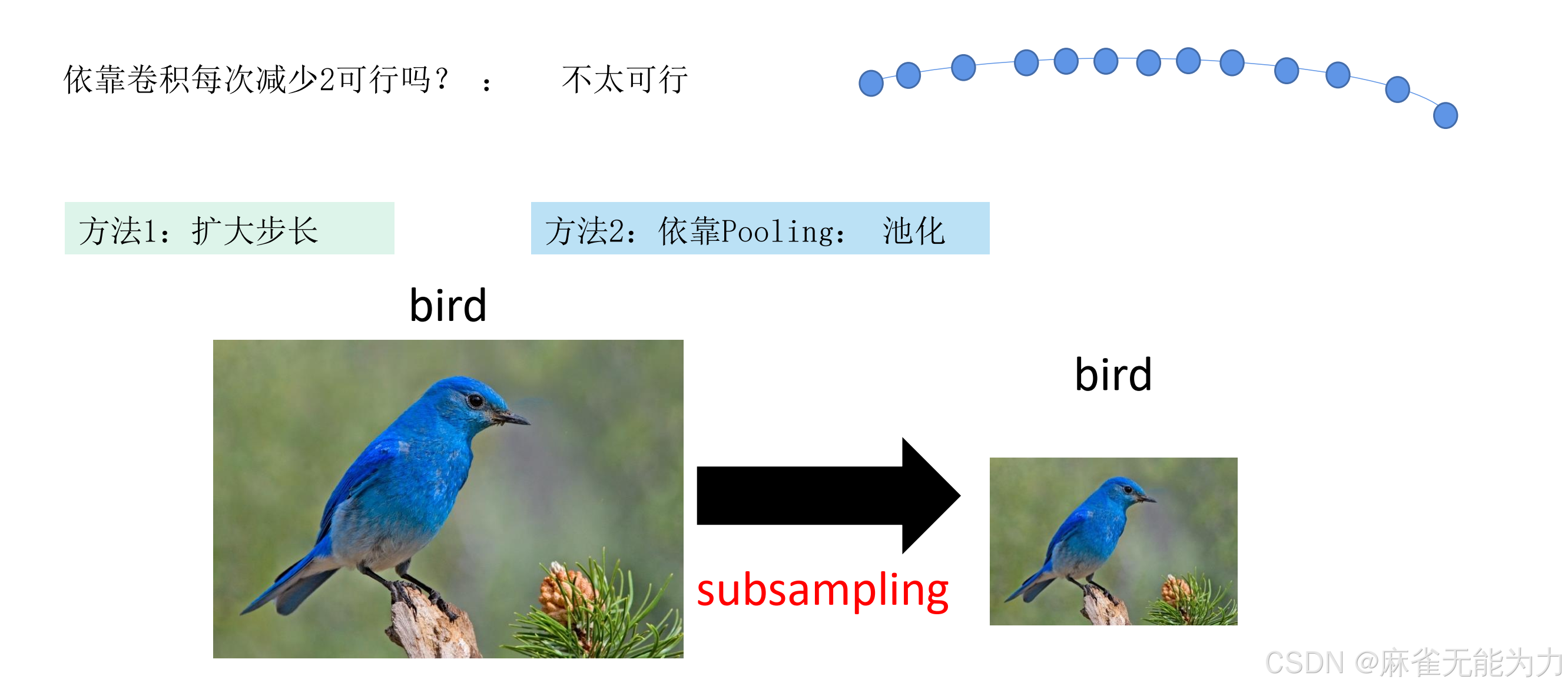
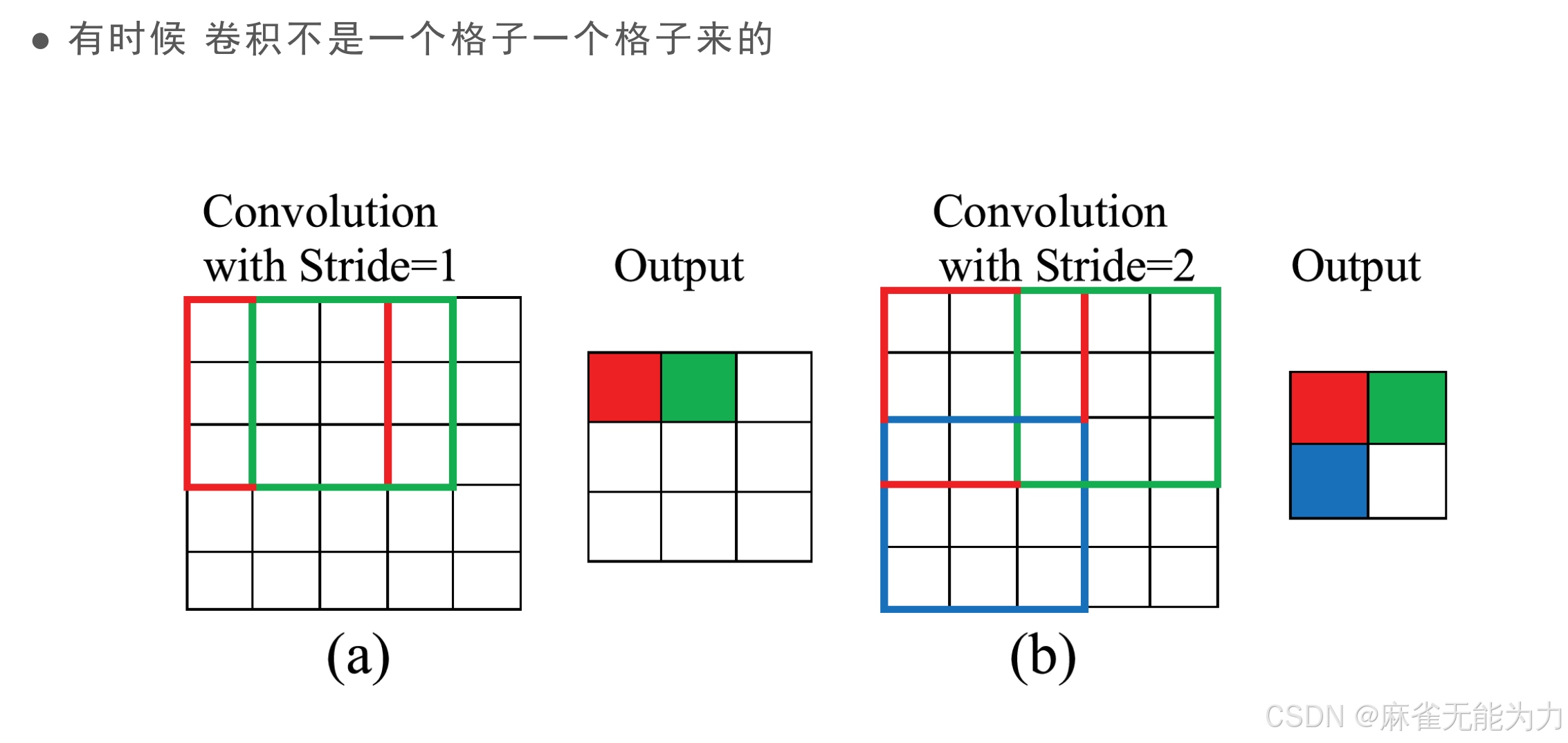
方法一:
步长
降低采样,设置步长:
计算公式:
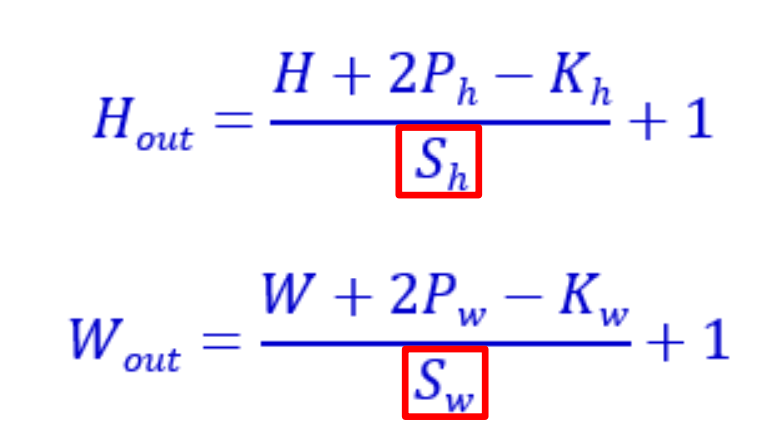
两个S均为步长
该方法会丢失数据,引入计算;
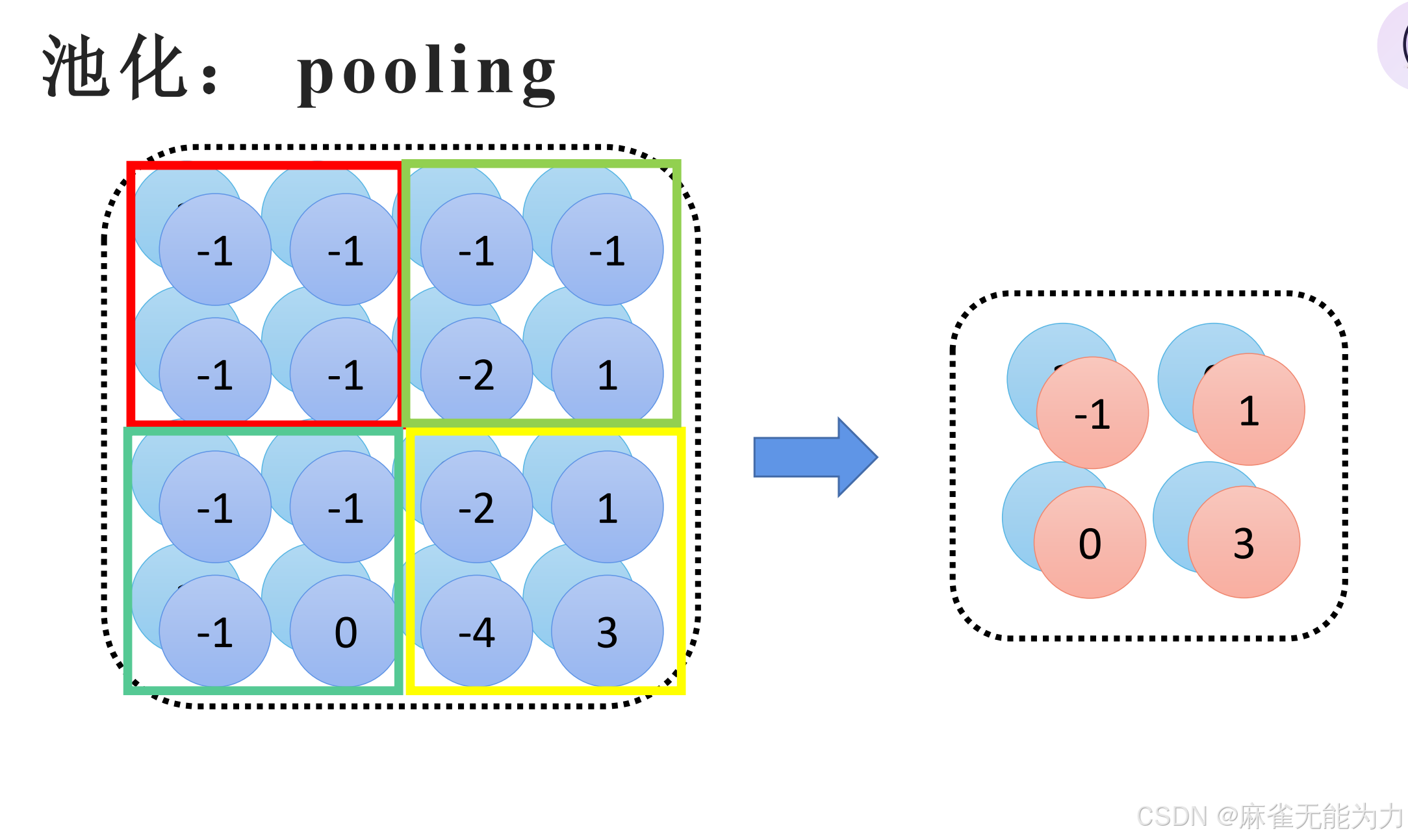
方法二:
池化
池化是对特征图缩小的一种操作,用各种方法分区域缩小特征图都能称为池化
池化的原理:
特征图中的相邻区域倾向于具有相似的值,因此通常卷积后输出值也具有相似的值。
这说明特征图中太过相近的值其实是差不多的,也可以说是冗余的,因此去掉也无所谓。
这种方法能帮我们提取到主要特征
两种池化方式:
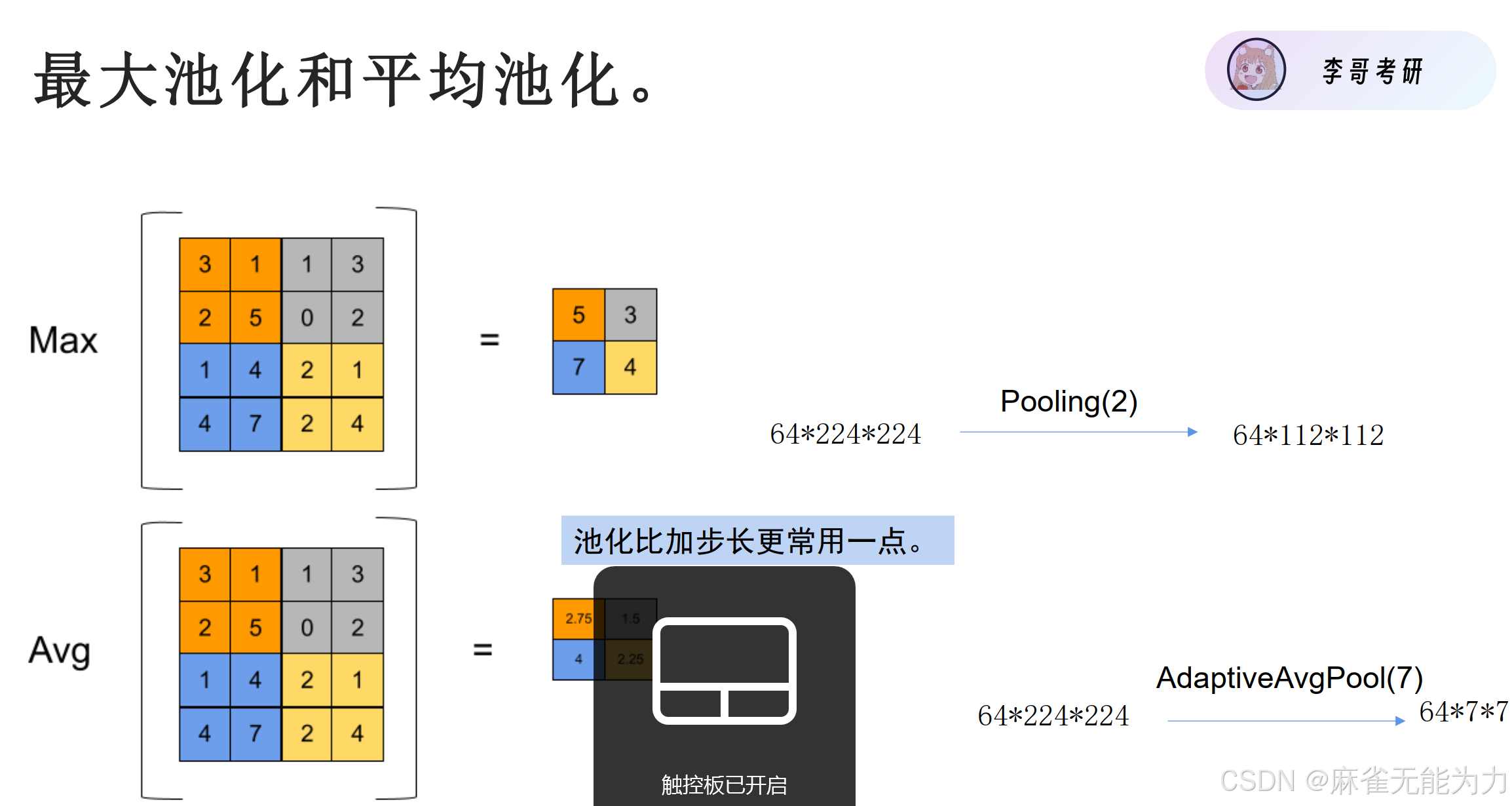
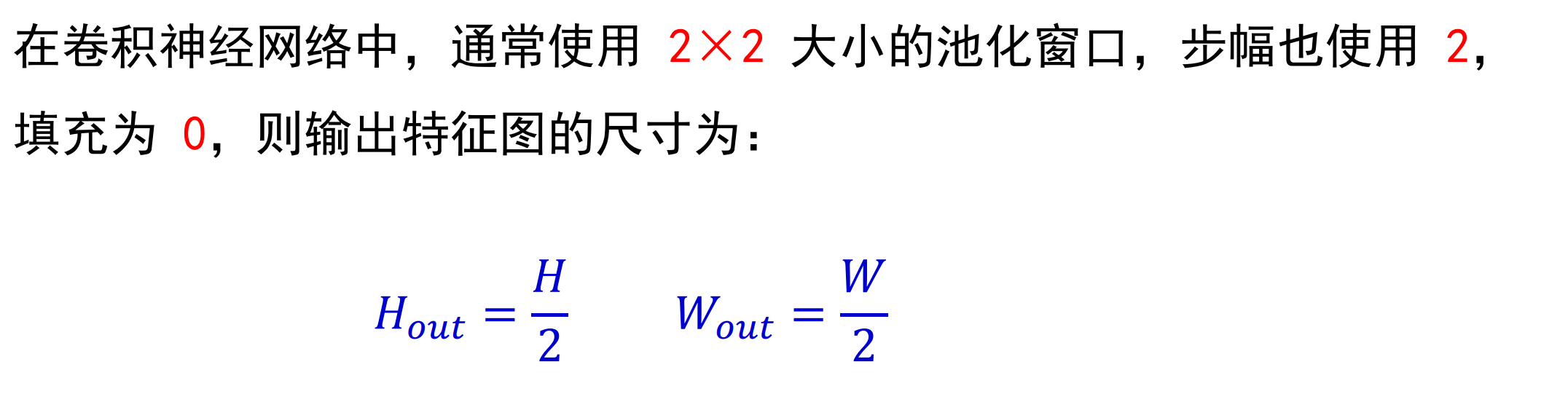
加入池化后输出图片的尺寸计算:

与用步长进行计算其实是相似的,就是把步长替换为了池化尺寸。
池化的好处:
(1)最大池化提取纹理特征
(2)平均池化保留背景特征
(3)感受野增大
(4)经过池化操作以后,参数变少了
当然也有论文说取消池化层对于最终结果没有影响。
多通道多核卷积
通道:
比如rgb颜色,每个像素上多有三种颜色相加而得,那就称有三通道。
而特征图的通道由卷积核决定,每个卷积核能卷出一张特征图出来,那么有几个特征核就有几个通道

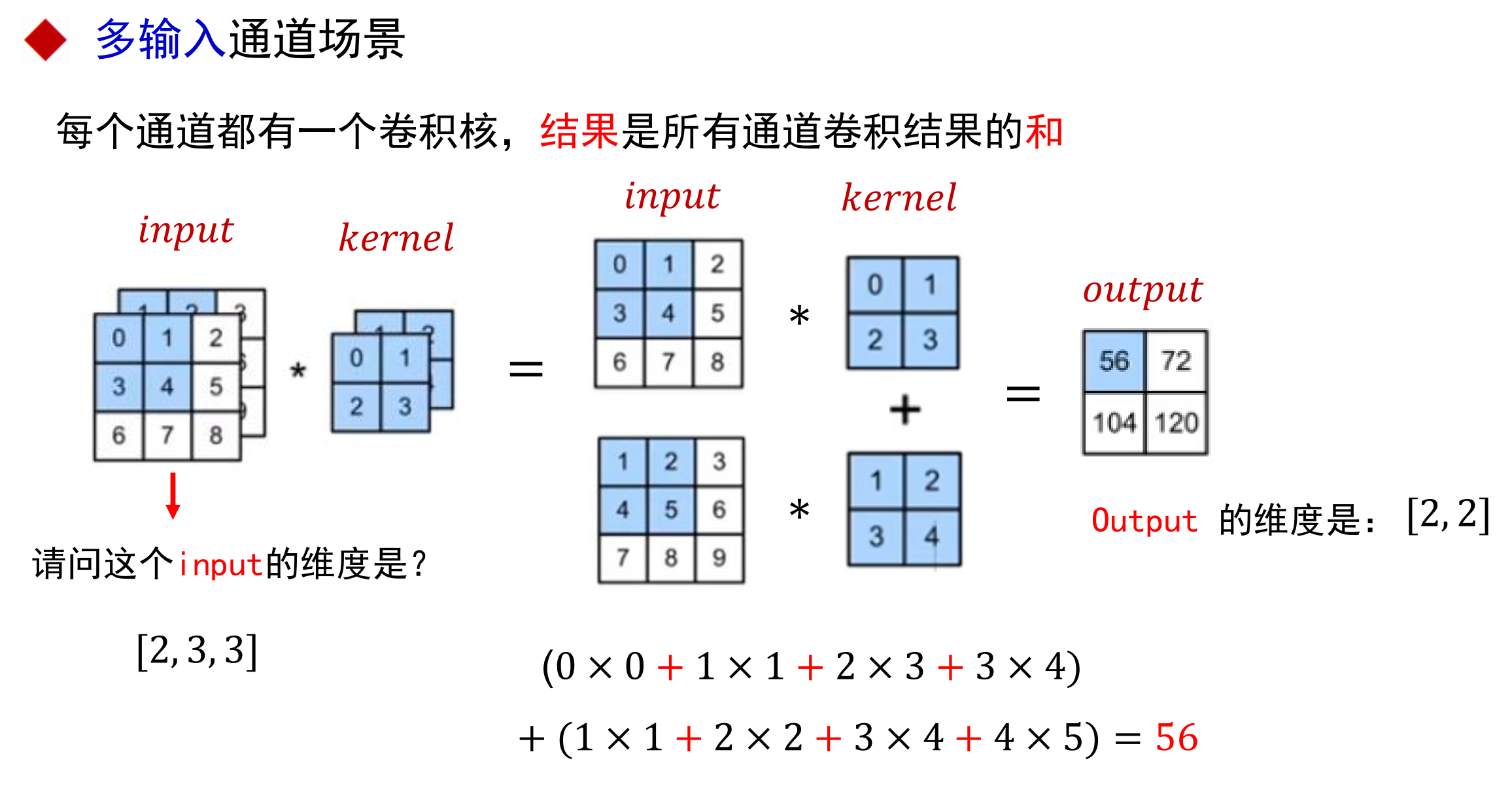
多输入通道计算过程:
输出只有一个通道的情况:
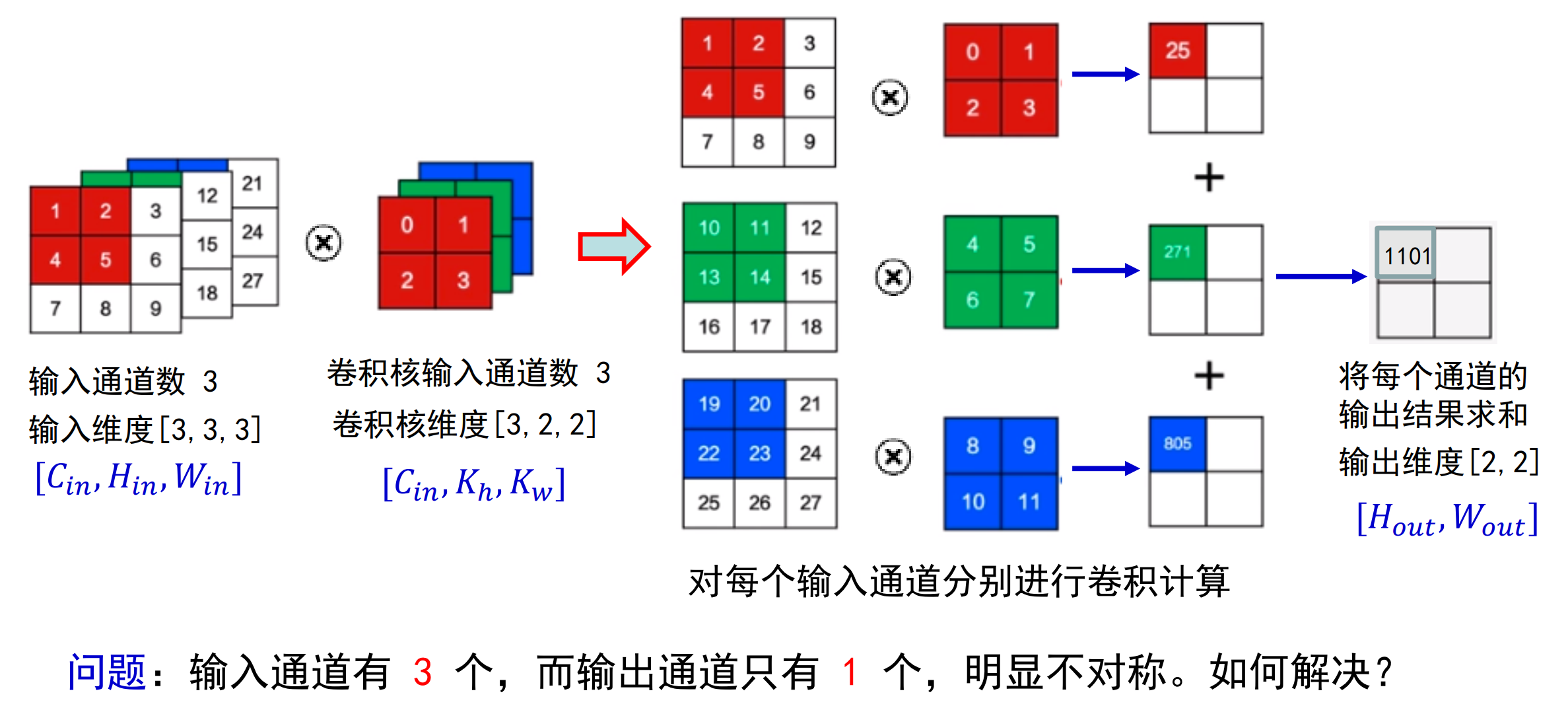

下图扩展为输出有三种的情况:
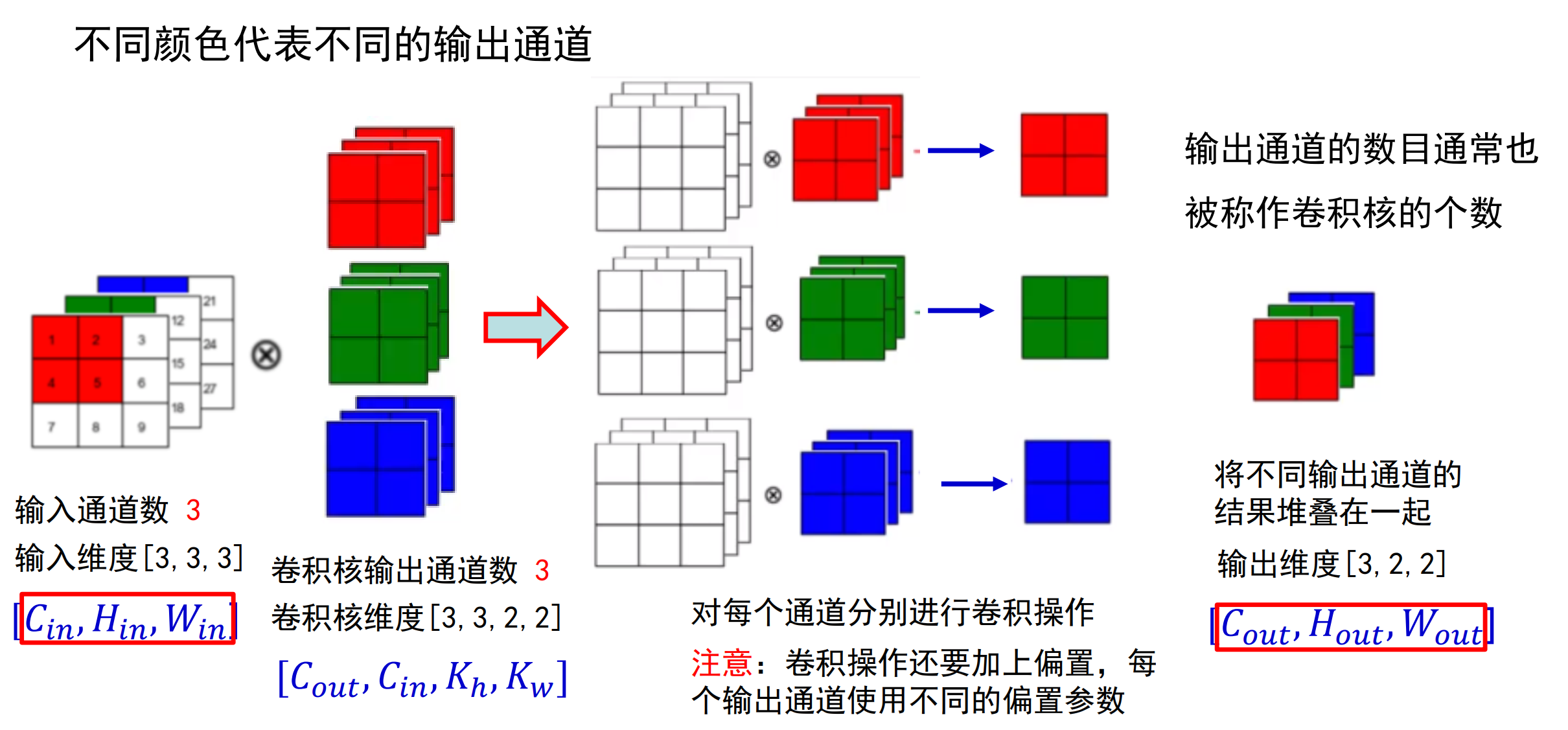

输出后的特征图为:

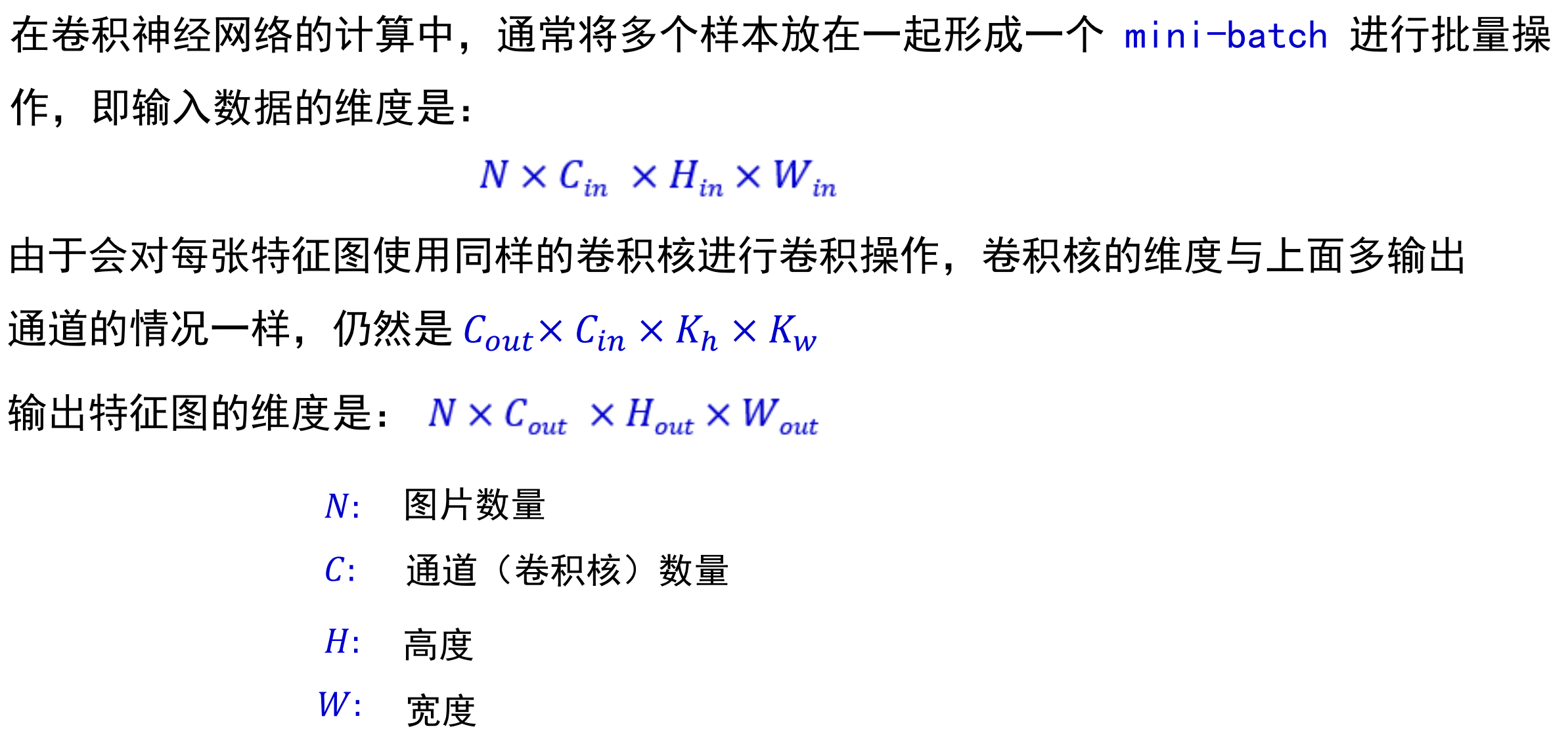
批量操作:
过拟合与欠拟合
泛化能力:
因此训练误差并不是越小越好。

过拟合
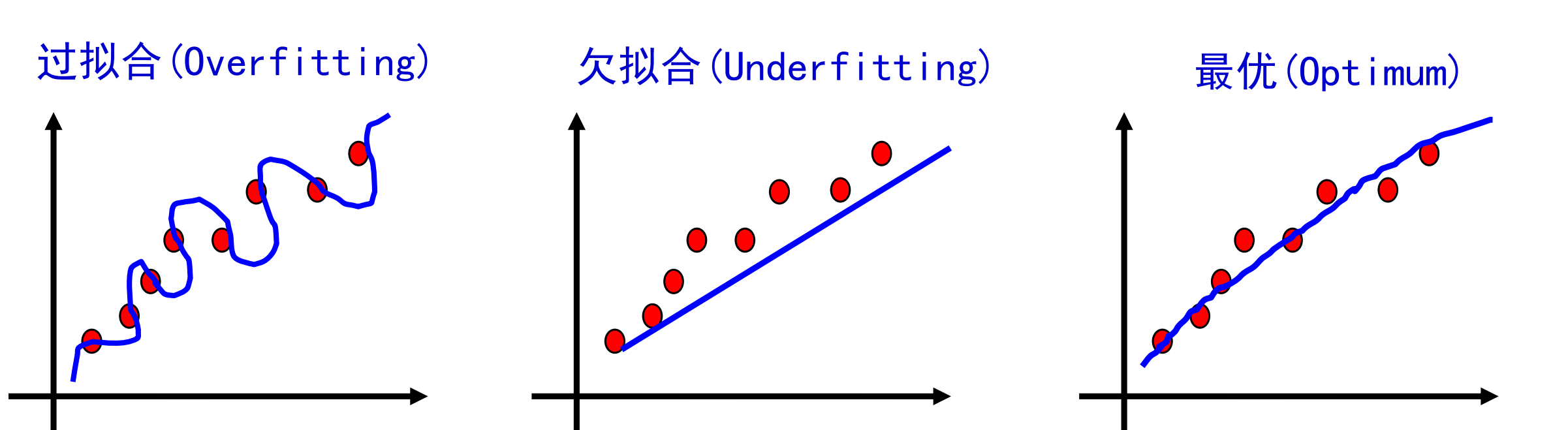
训练数据与过拟合:

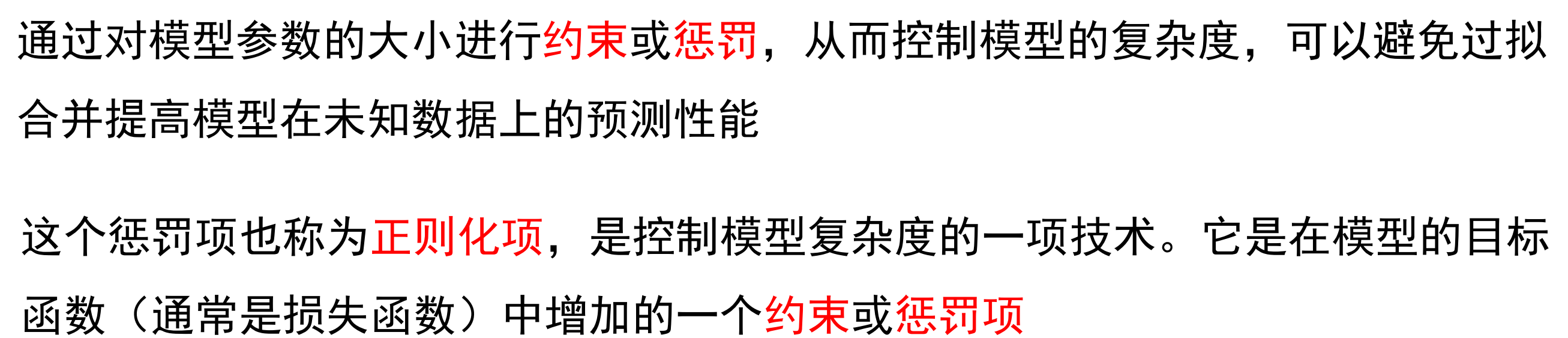
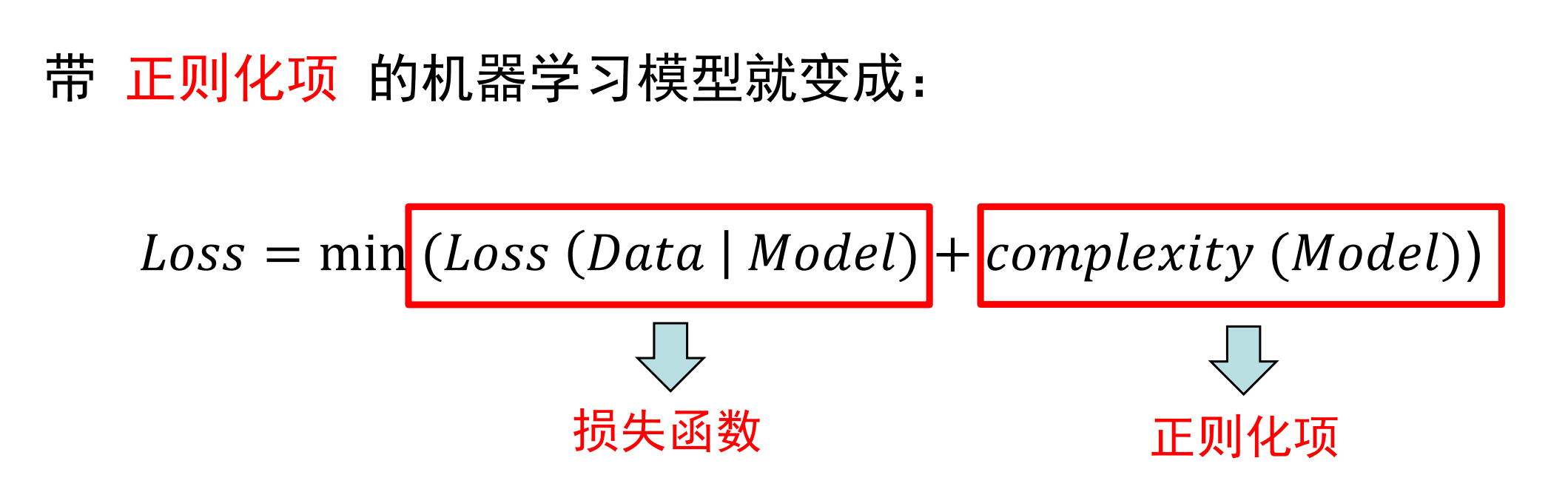
正则项

这里引入一个范数的概念:
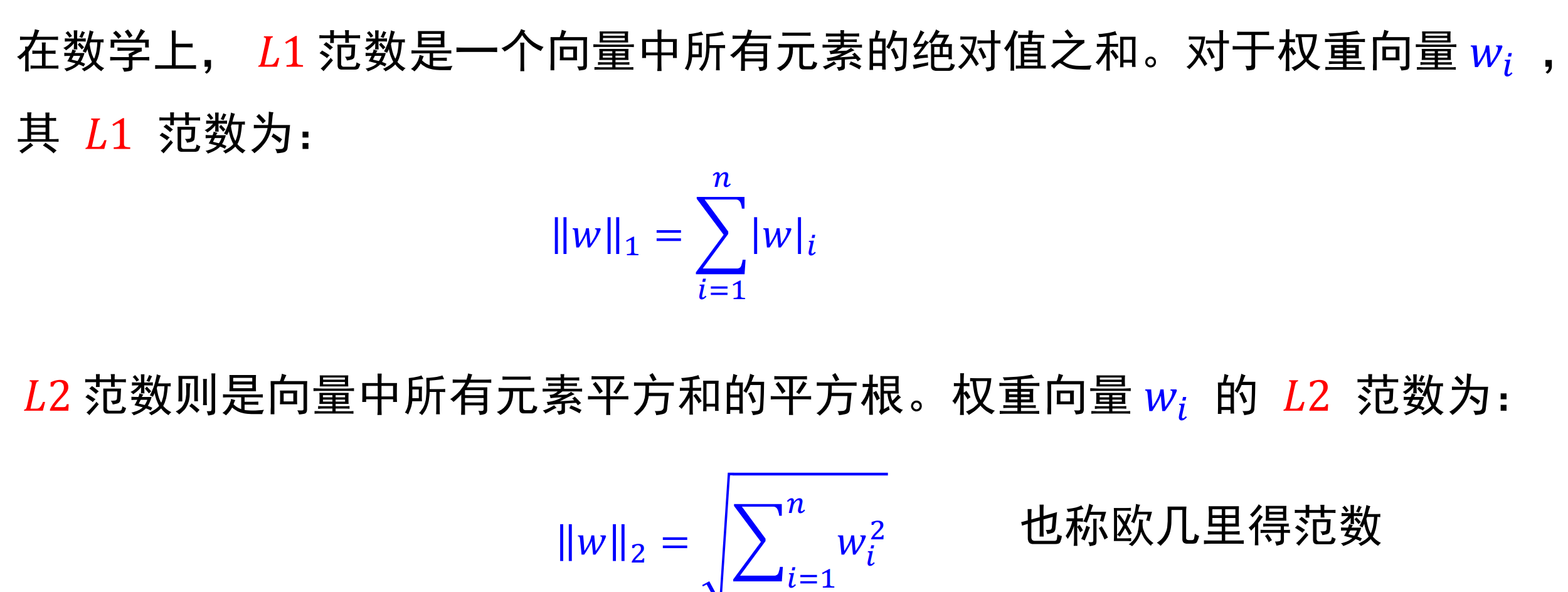
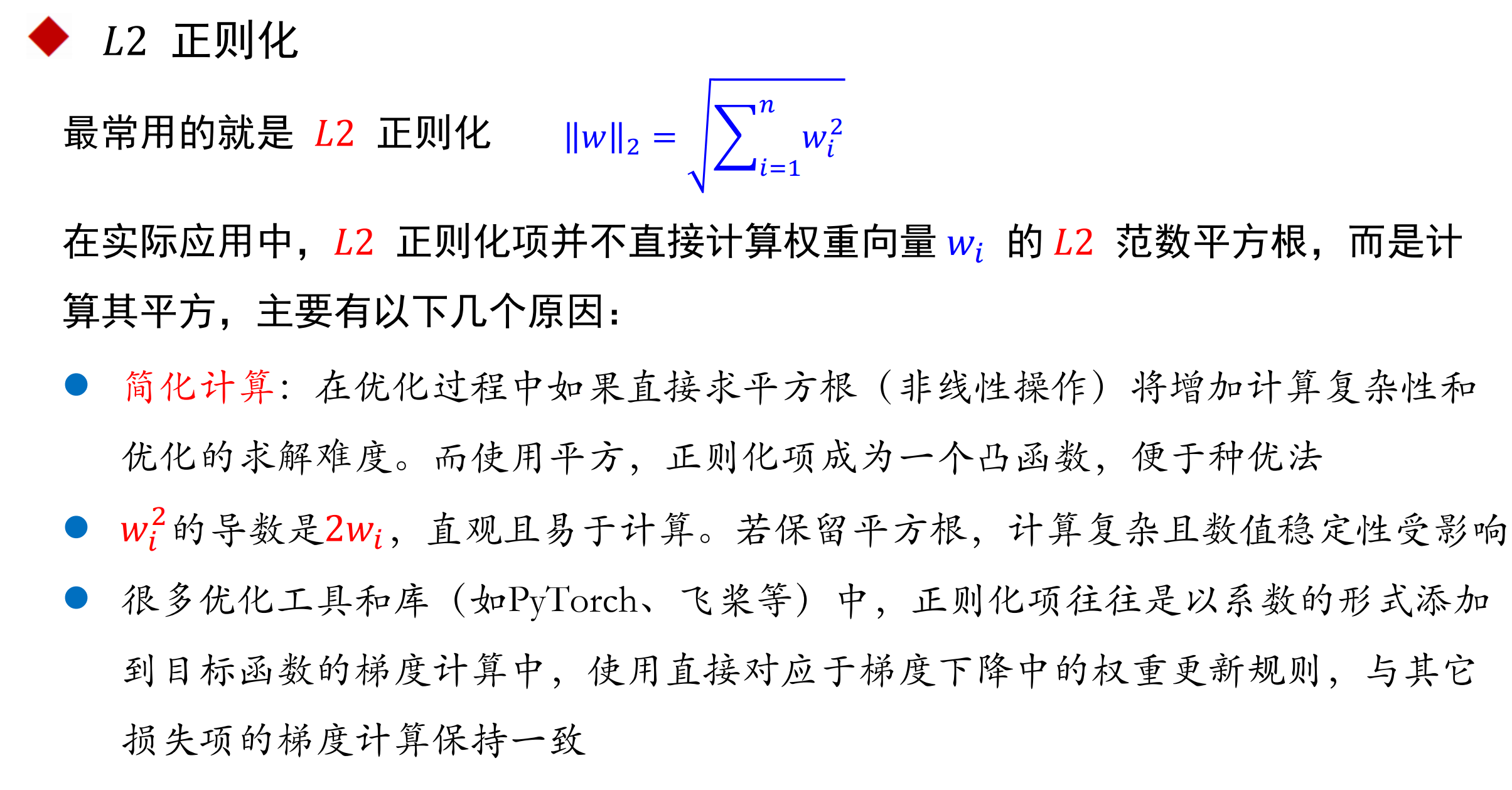
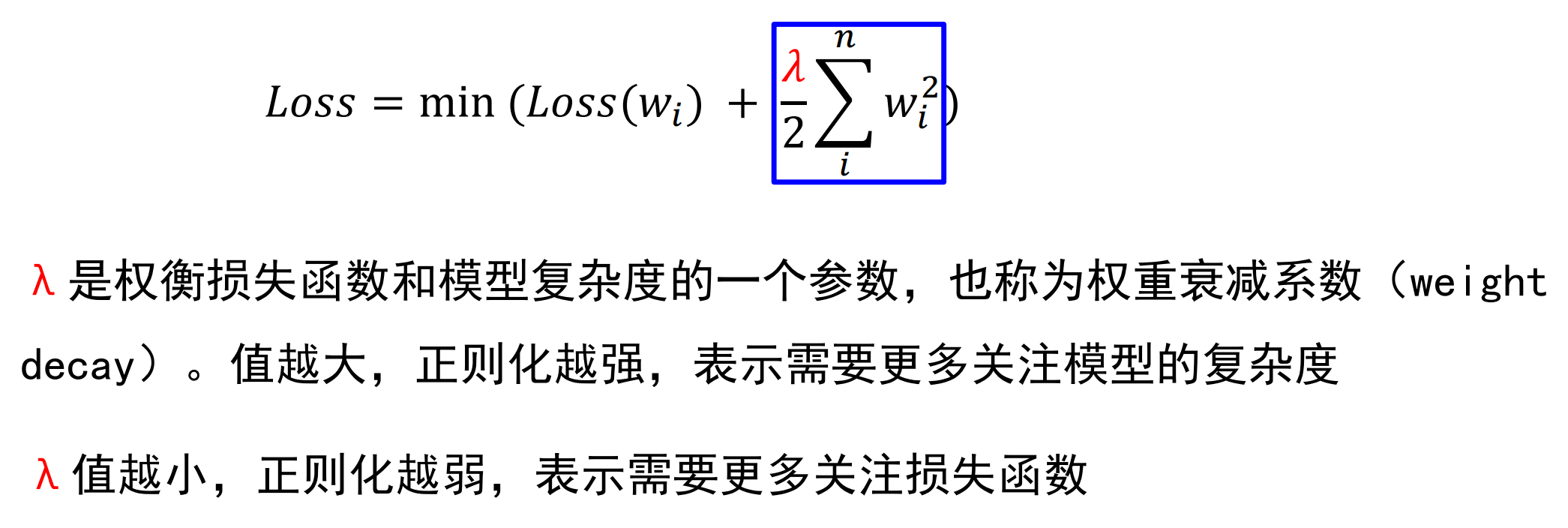
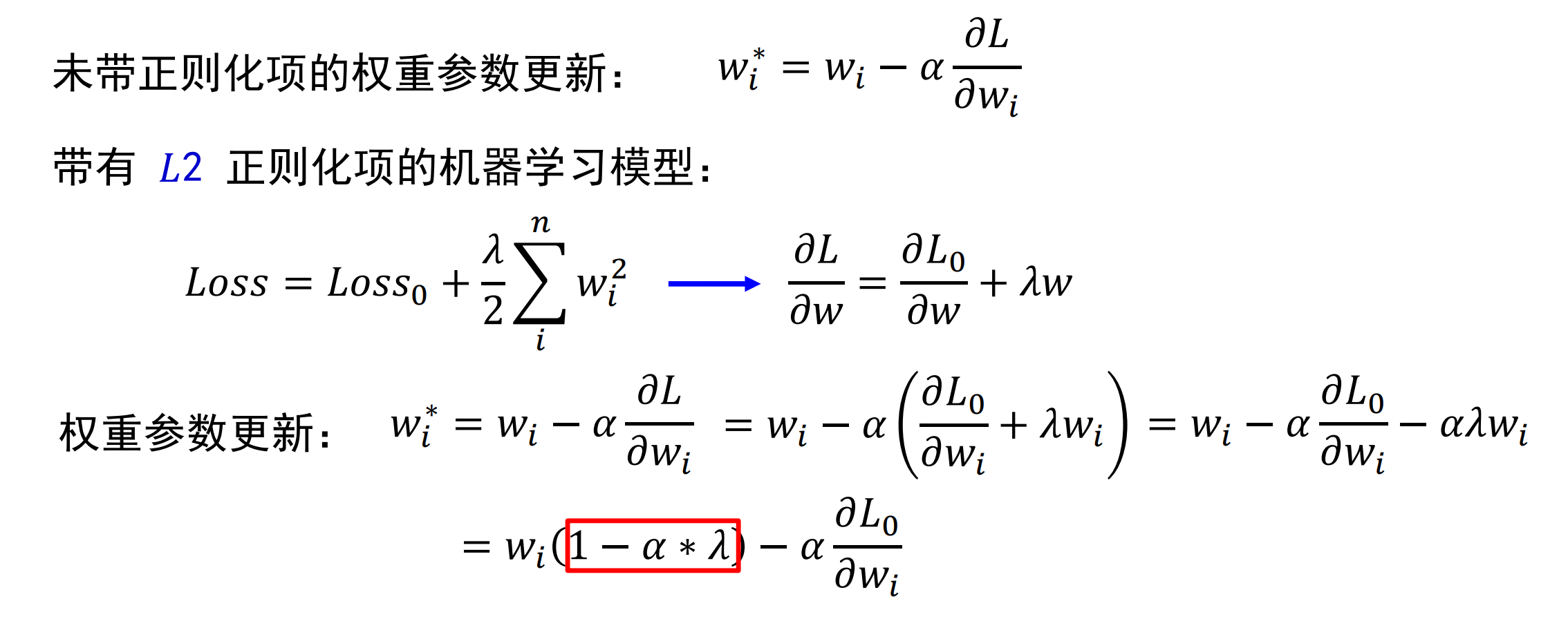
最终的损失函数为:
卷积神经网络的实现:
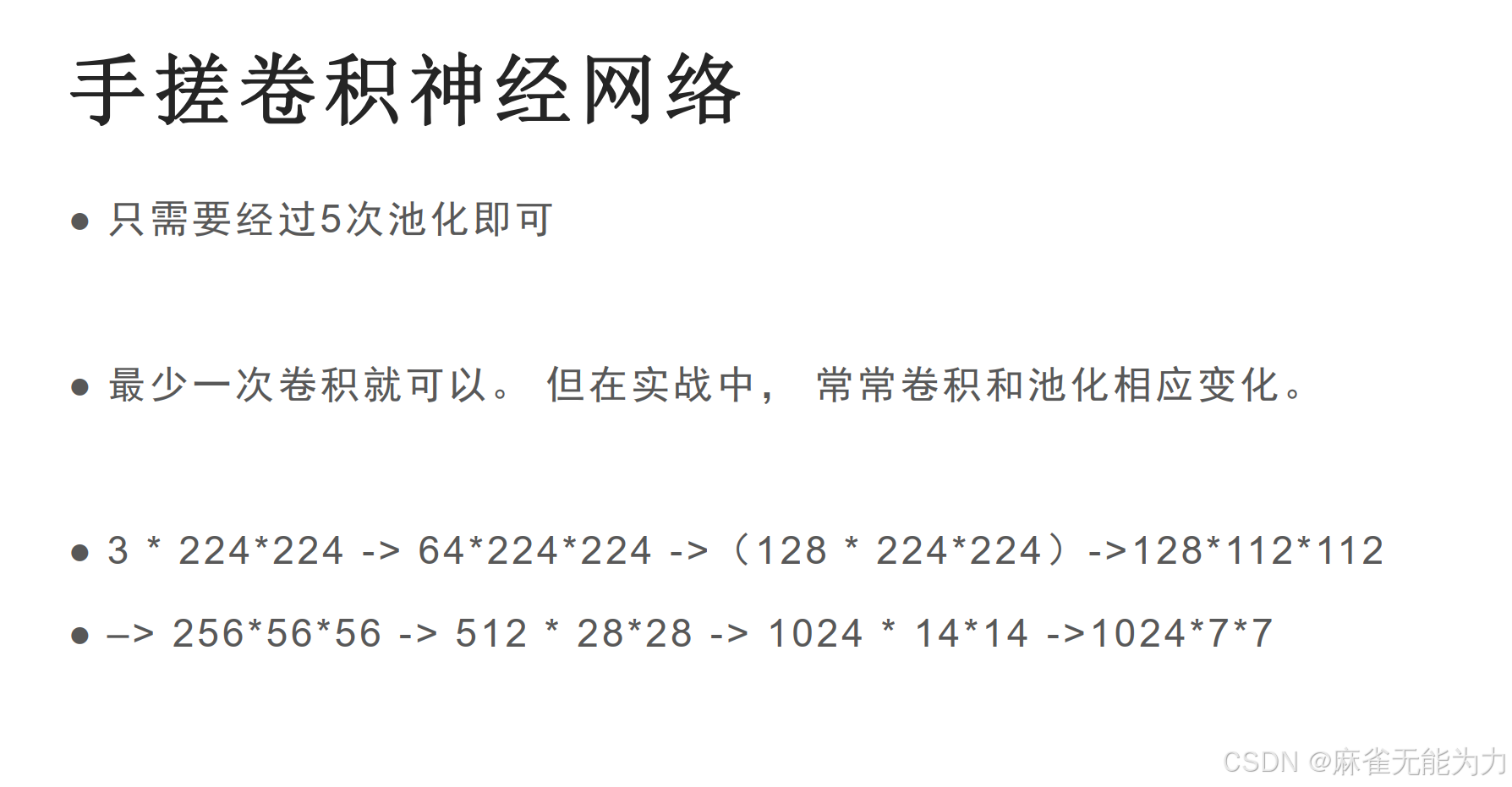
用卷积核数量改变层数,用池化改变特征图大小
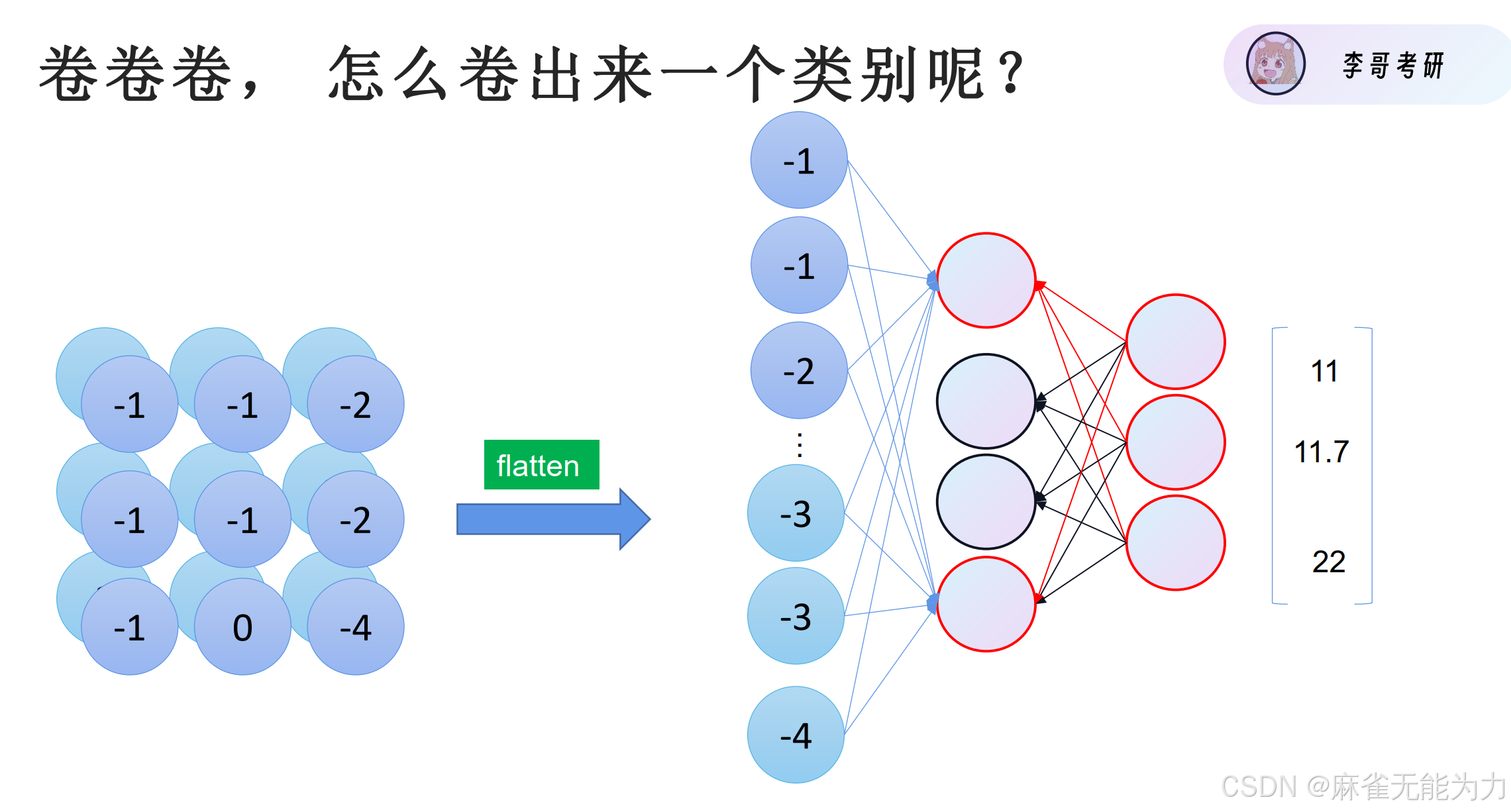
将特征图卷小后就可以平铺展开,在进行回归。
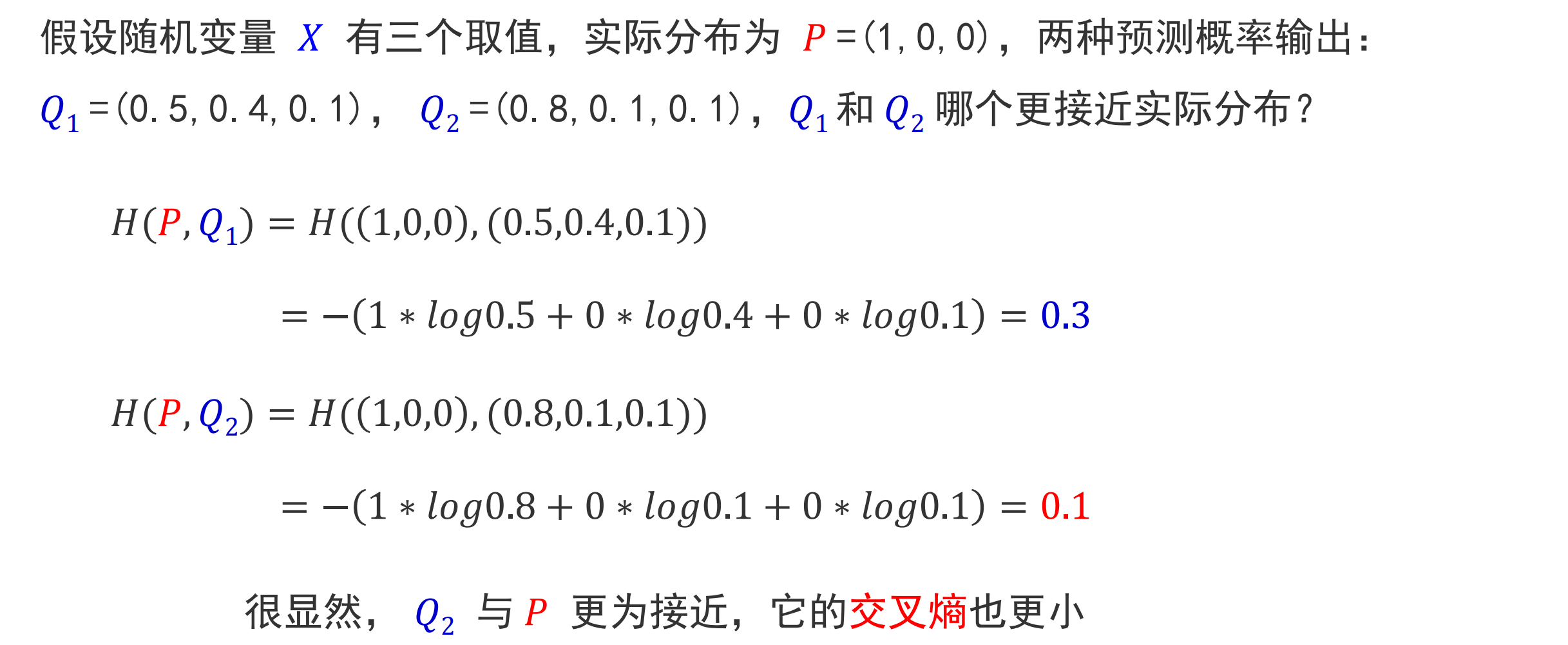
计算loss
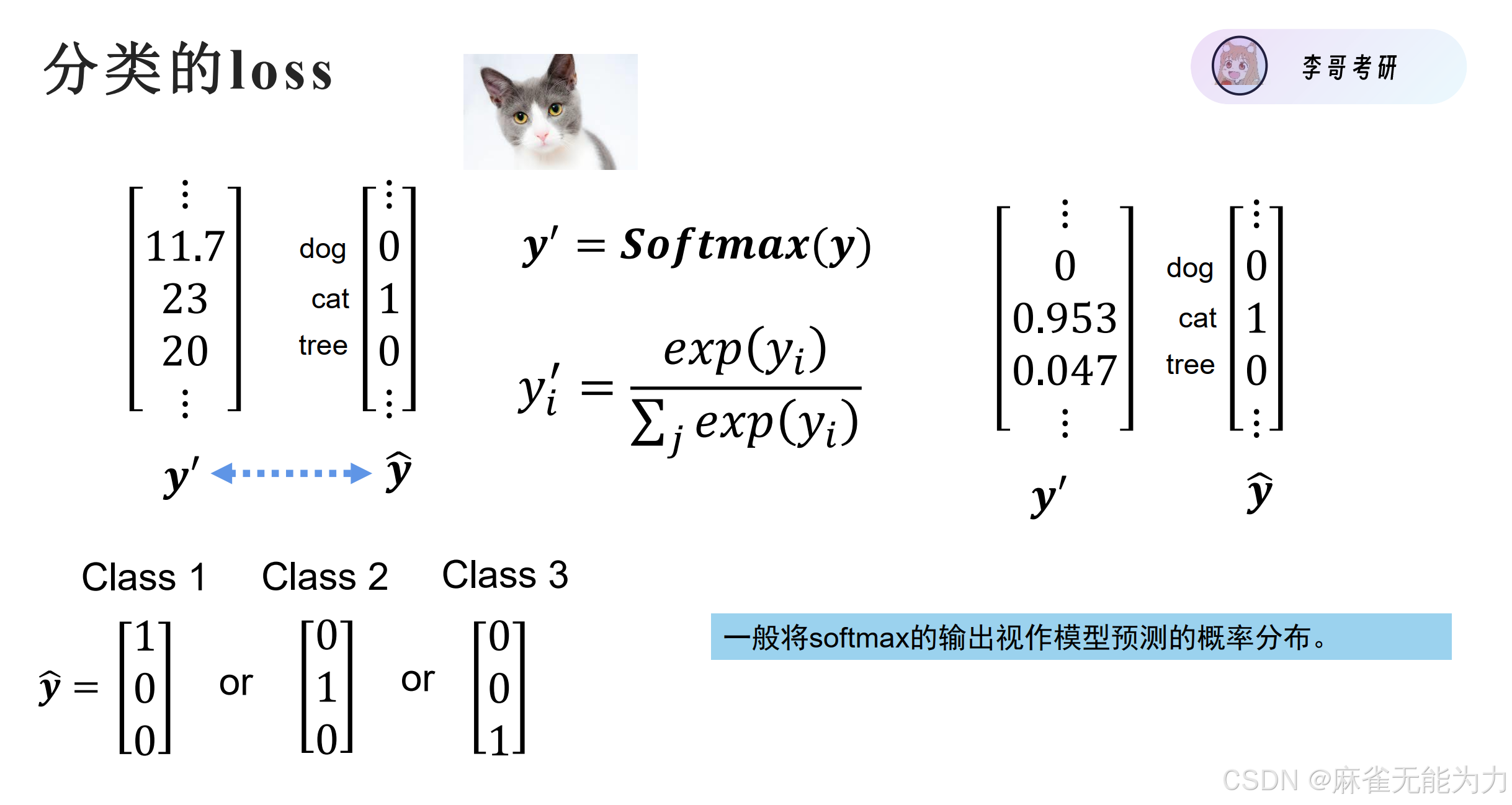
首先要转化为概率分布
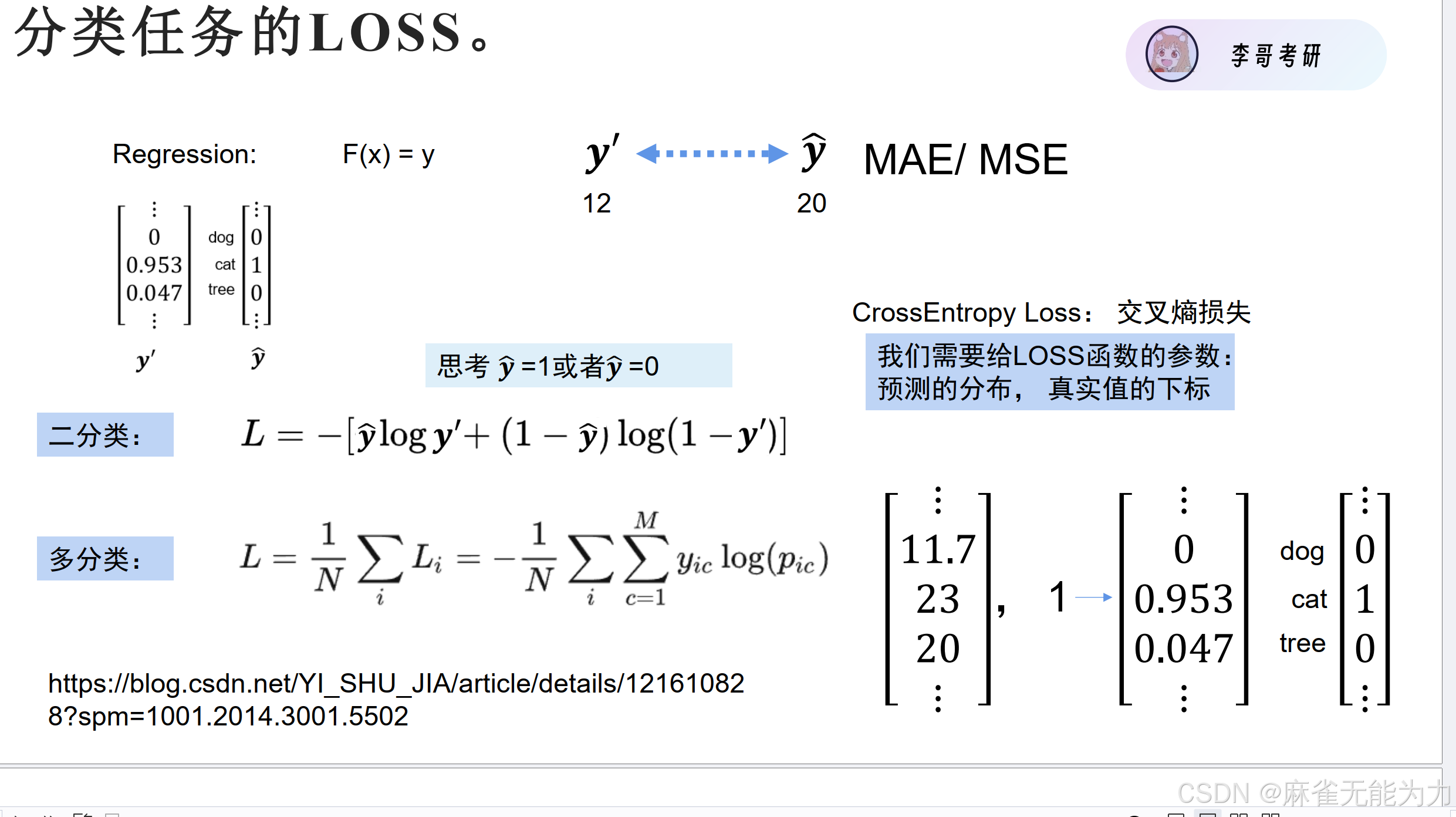
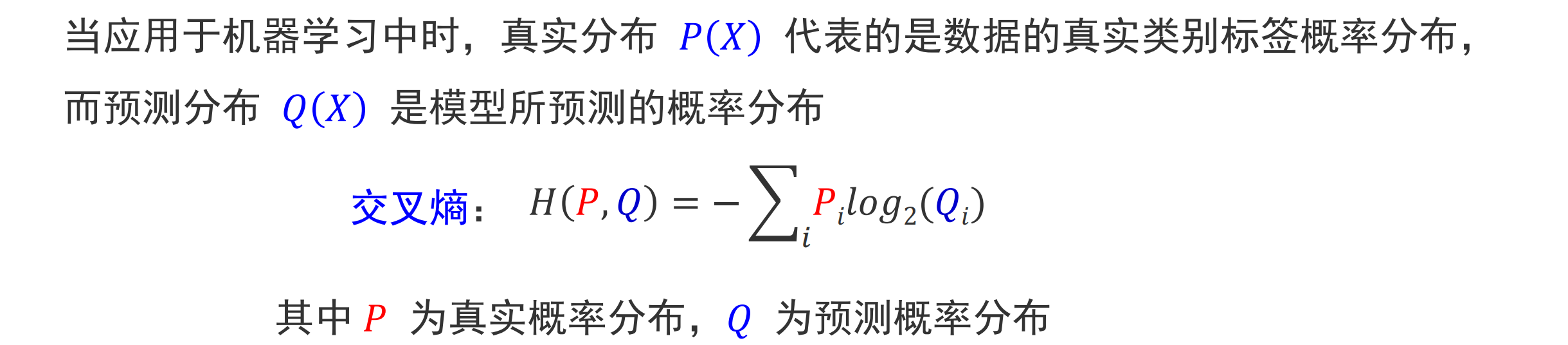
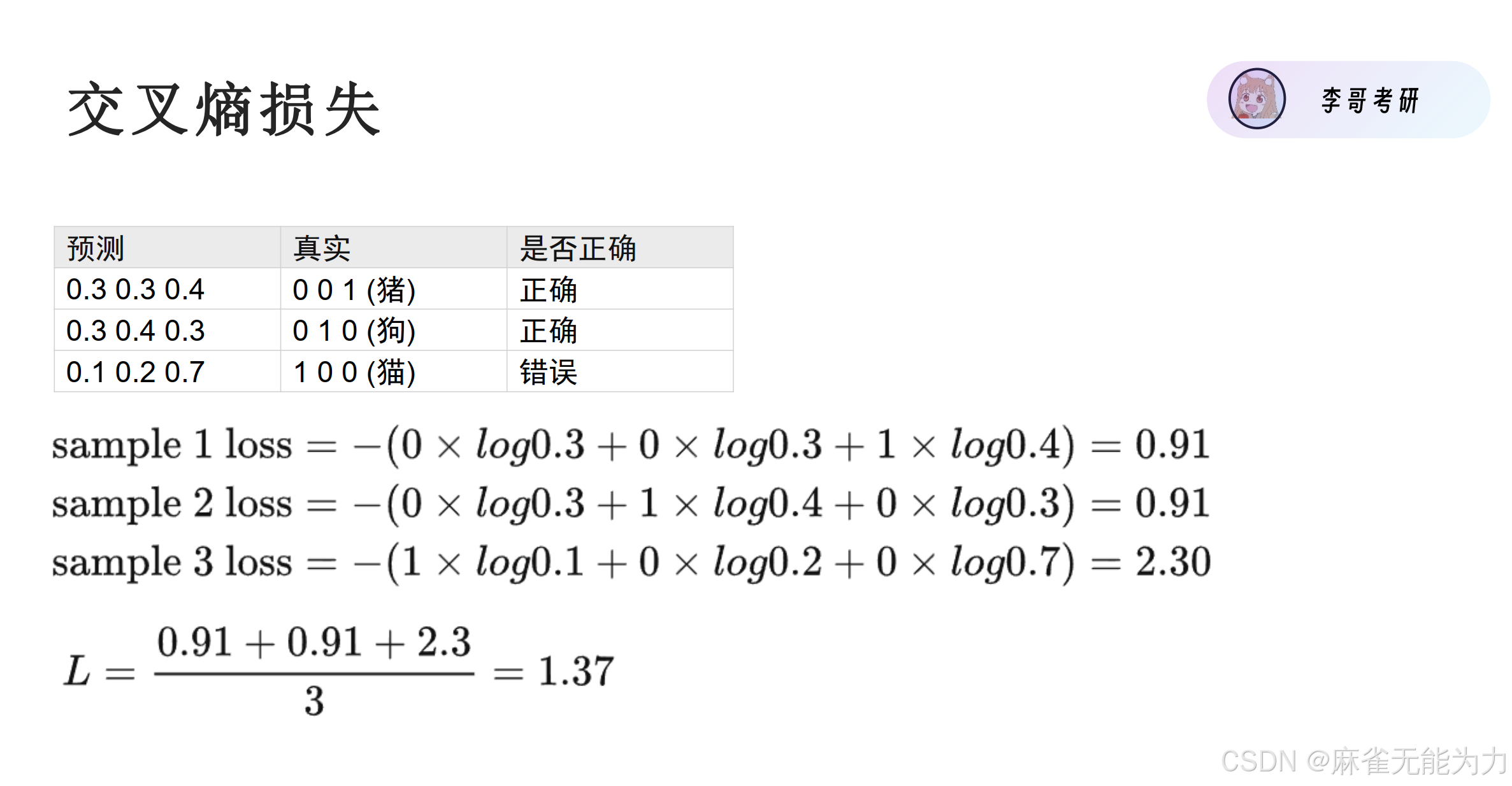
然后计算交叉熵损失
下面是一个用来理解多分类公式的实例:
卷积神经网络的发展:
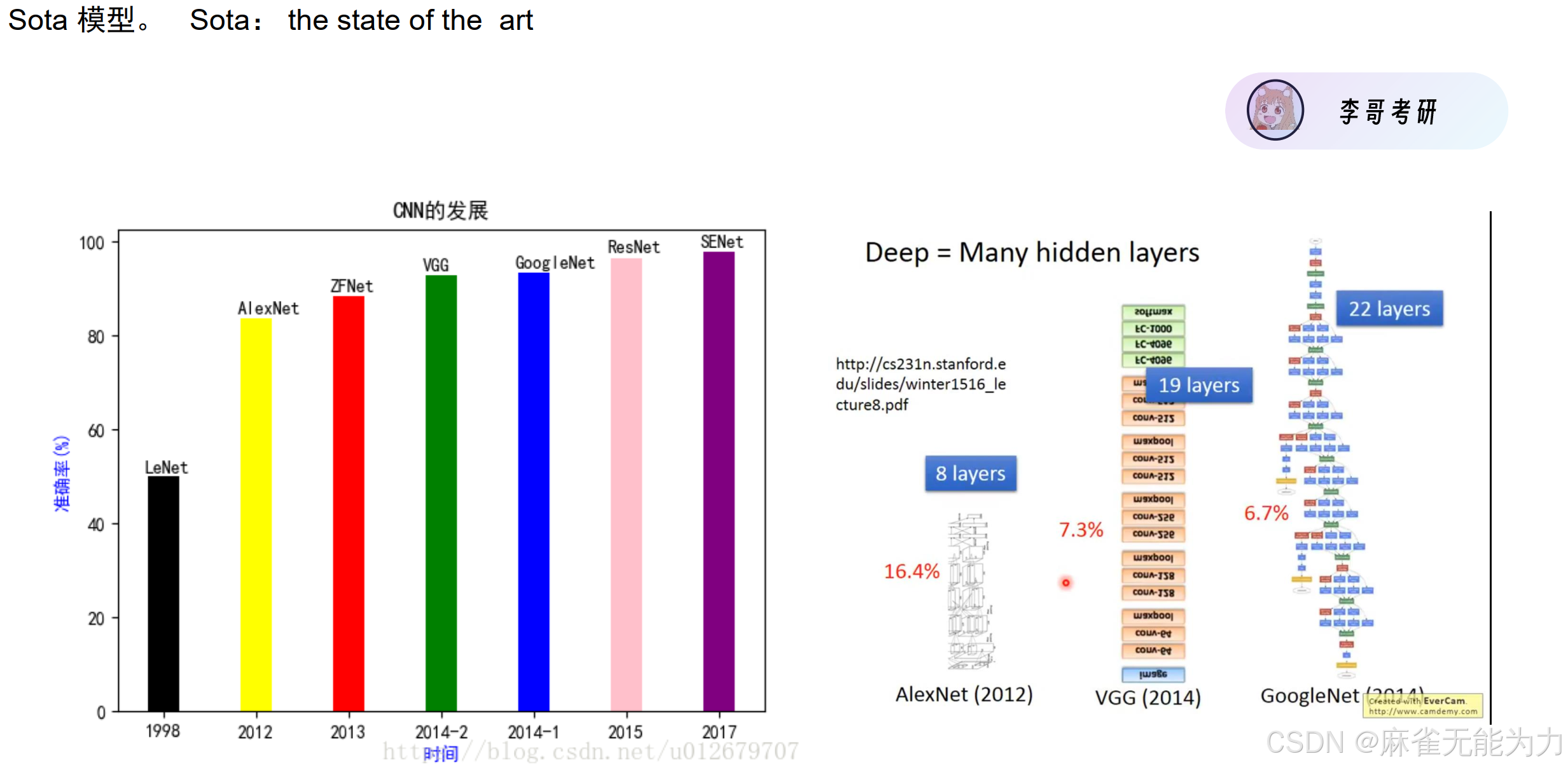
一些可以提出的创新点:
drop out
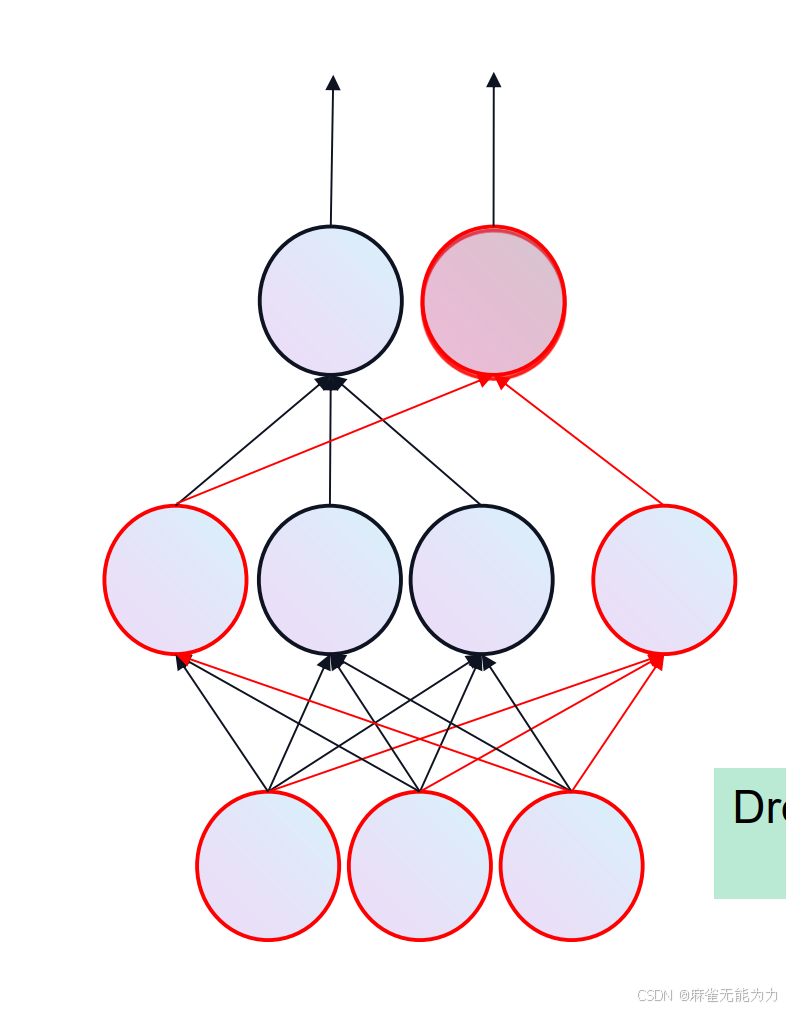
使某些节点在训练时不发挥作用,可以避免过拟合,减小计算量。
归一化:
经典模型AlexNet的解析:
AlexNet
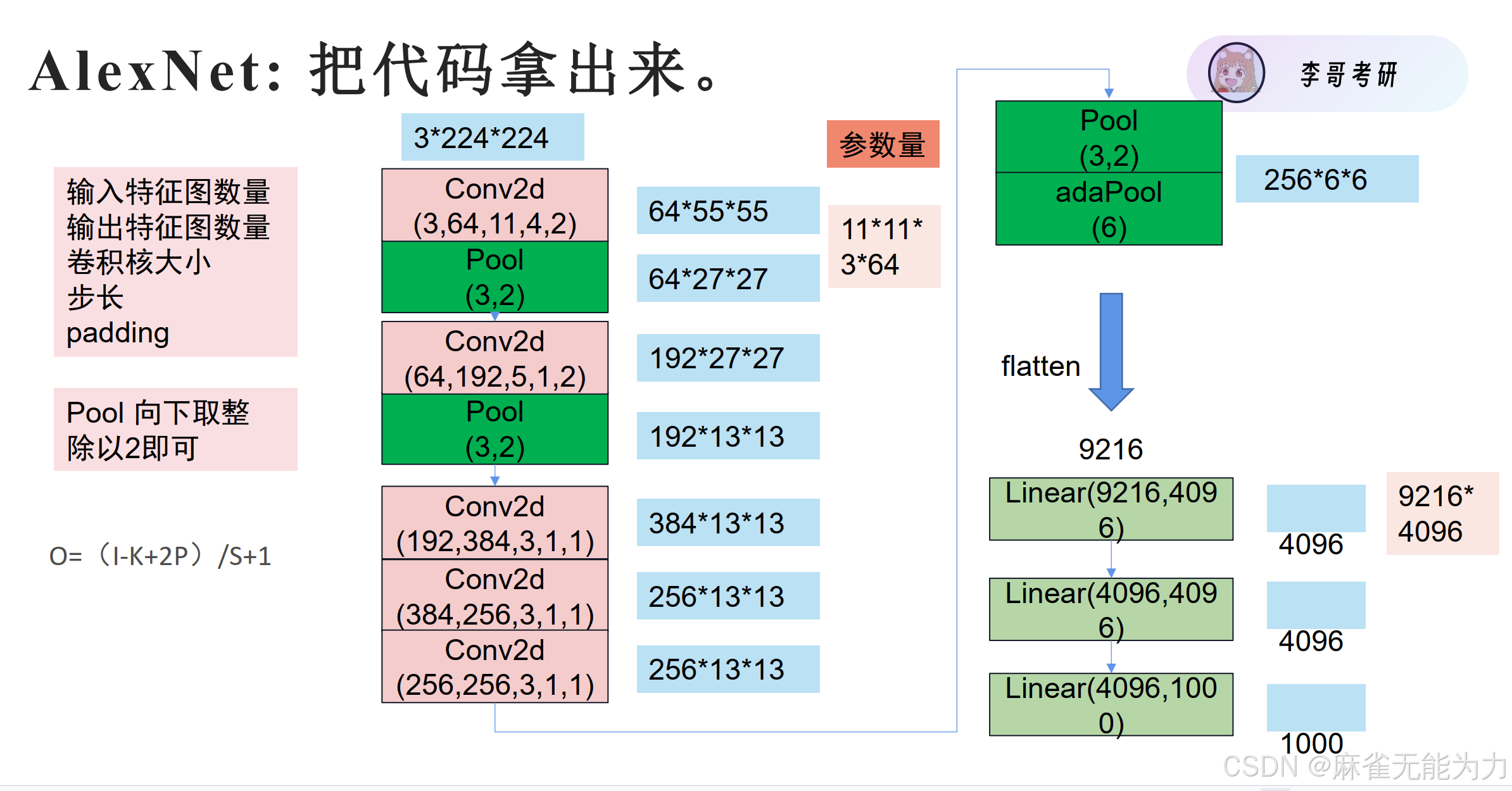
注:Pool中的第一个数字表示单次池化范围,第二个数字表示池化步长
参考代码:
class MyAlexNet(nn.Module): #定义模型中样式
def __init__(self):
super(MyAlexNet, self).__init__()
self.relu = nn.ReLU()
self.drop = nn.Dropout(0.5)
self.conv1 = nn.Conv2d(in_channels=3, out_channels=64, kernel_size=11, stride=4,padding=2)
self.pool1 = nn.MaxPool2d(3, stride=2)
self.conv2 = nn.Conv2d(64,192,5,1,2)
self.pool2 = nn.MaxPool2d(3, stride=2)
self.conv3 = nn.Conv2d(192,384,3,1,1)
self.conv4 = nn.Conv2d(384,256,3,1,1)
self.conv5 = nn.Conv2d(256, 256, 3, 1, 1)
self.pool3 = nn.MaxPool2d(3, stride=2)
self.adapool = nn.AdaptiveAvgPool2d(output_size=6)
self.fc1 = nn.Linear(9216,4096)
self.fc2 = nn.Linear(4096,4096)
self.fc3 = nn.Linear(4096,1000)
def forward(self,x): #使用样式构造模型
x = self.conv1(x)
x = self.relu(x)
x = self.pool1(x)
x = self.conv2(x)
x = self.relu(x)
x = self.pool2(x)
x = self.conv3(x)
x = self.relu(x)
print(x.size())
x = self.conv4(x)
x = self.relu(x)
print(x.size())
x = self.conv5(x)
x = self.relu(x)
x = self.pool3(x)
print(x.size())
x= self.adapool(x)
x = x.view(x.size()[0], -1)
x = self.fc1(x)
x = self.relu(x)
x = self.fc2(x)
x = self.relu(x)
x = self.fc3(x)
x = self.relu(x)
return xAlexNet的创新点:
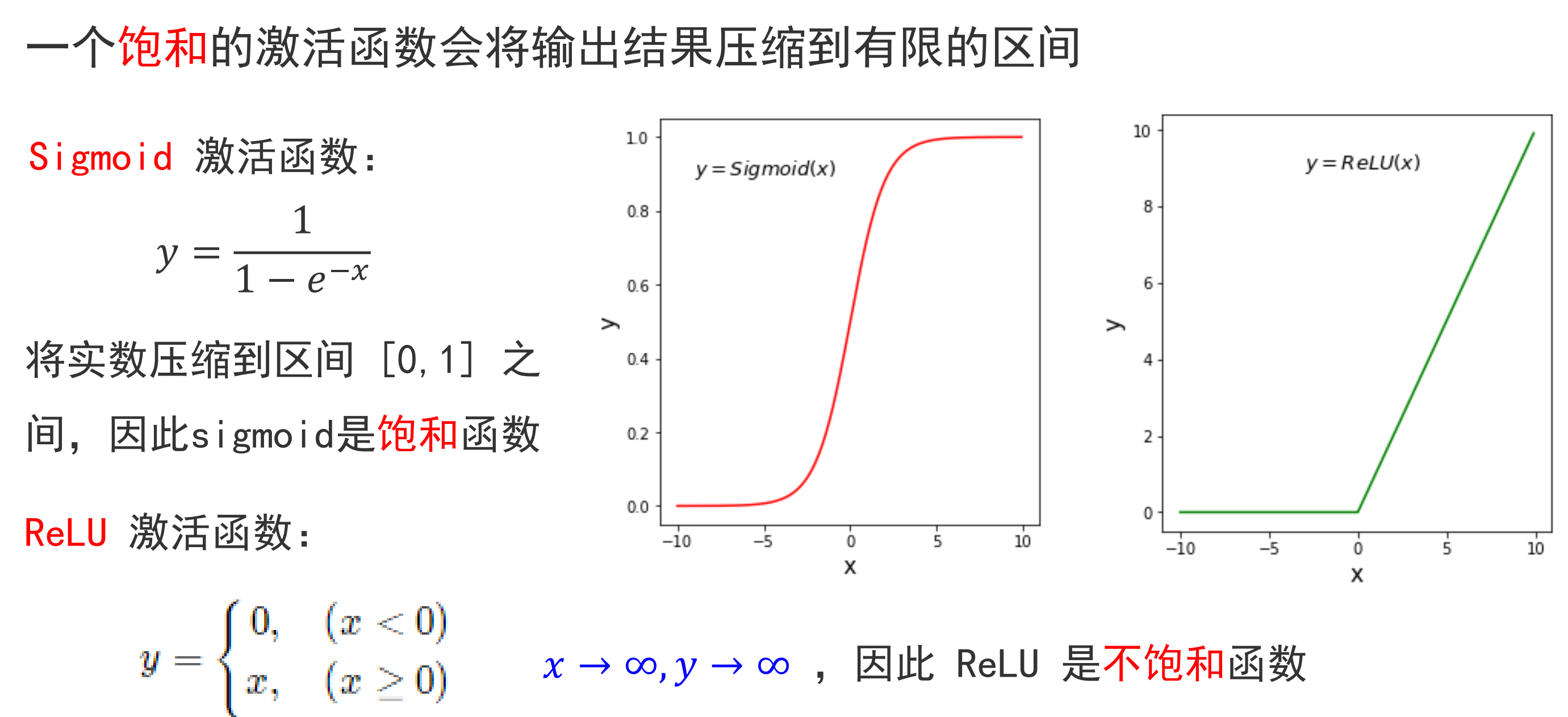
采用非饱和神经元(ReLU Nonlinearity)
在多个GPU上训练
为了在深层网络中训练120万张高分辨率图像,用两个 GPU 把网络给分开,形成上下两层。一部分参数和计算在第一块显卡上进行,另一部分参数在第二块显卡进行。
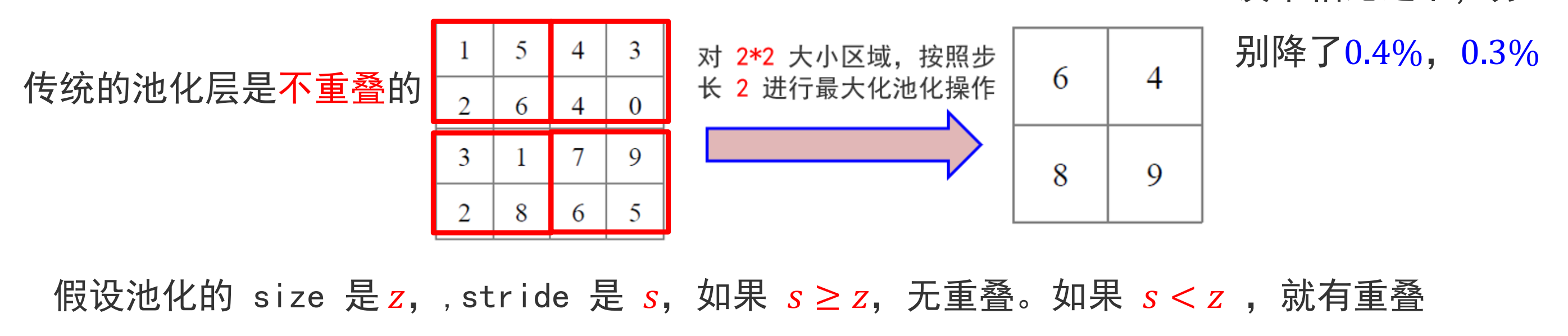
重叠池化
整体架构
整体架构
该网包含八层,前五个是卷积层,其余三个是全连接层,最后一个全连接层的输出作为softmax 函数的输入,输出超过 1000 个类别标签的分布。网络的输入为 150528维向量(224 × 224 × 3)
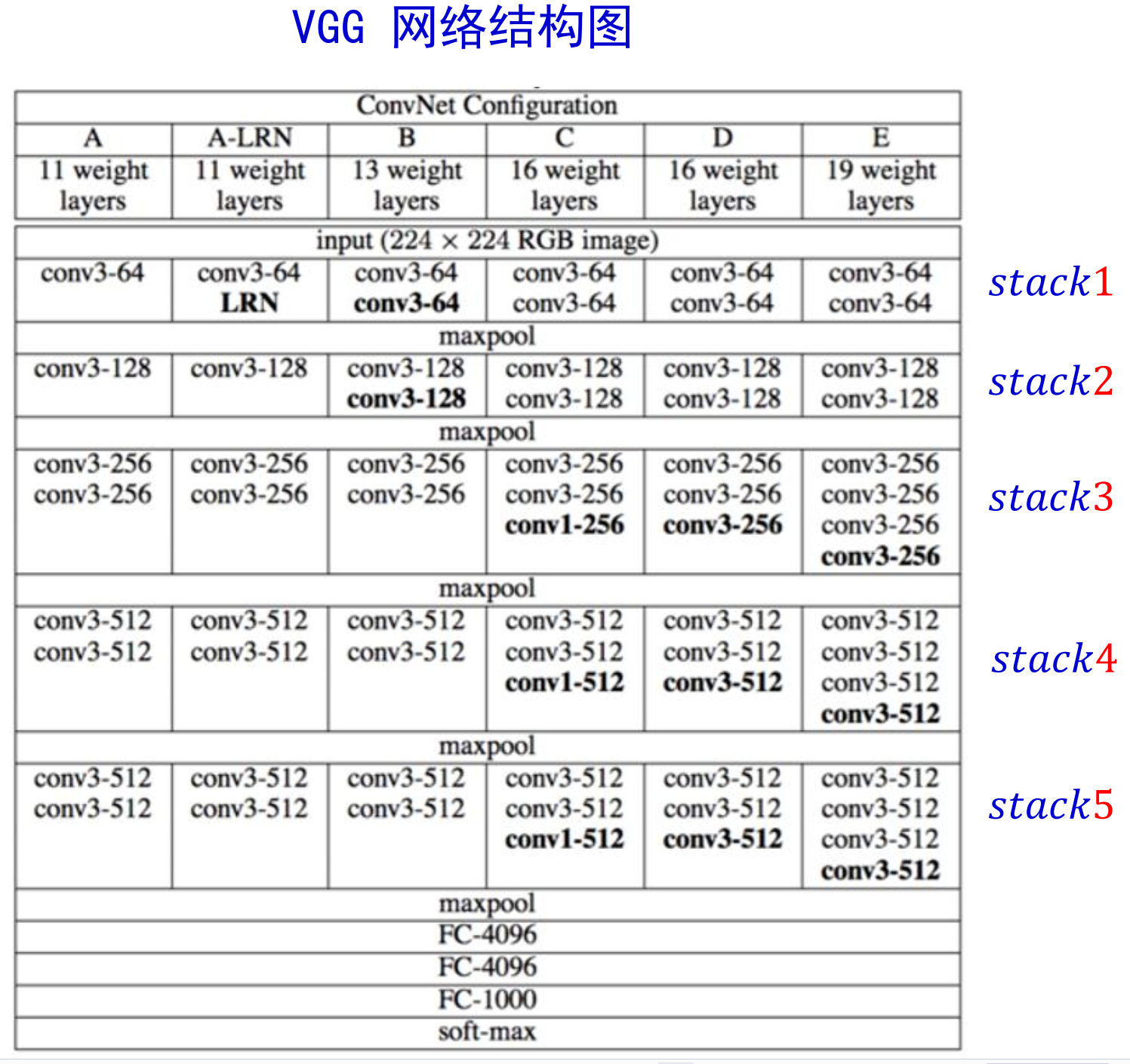
VGGNet
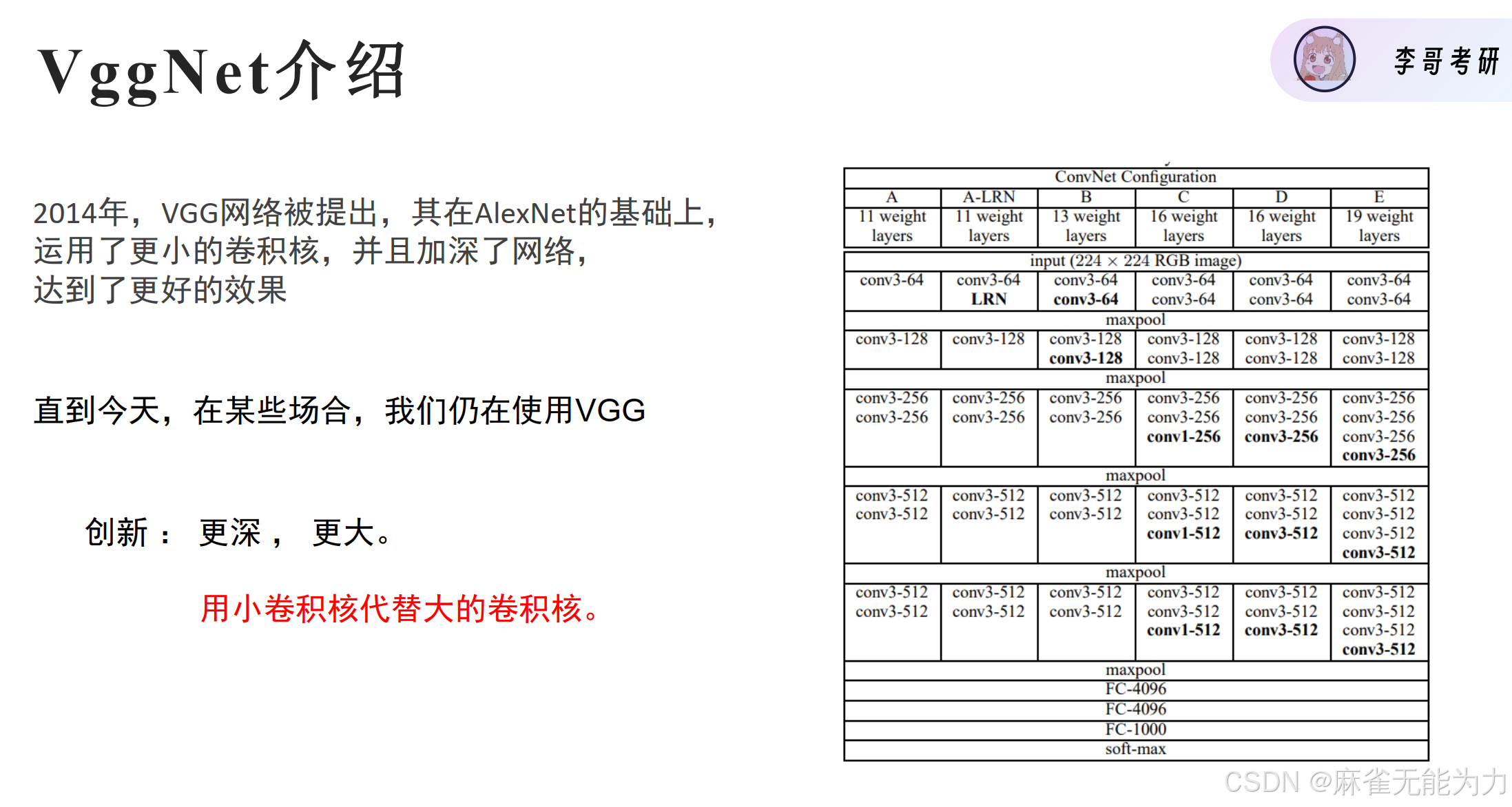
VggNet模型共有6种模型可选择(A到E),模型的区别主要在于卷积层,即每层stack
Vgg的创新点:
更小的卷积核:
在拥有相同的感受野的情况下可以保证参数更少
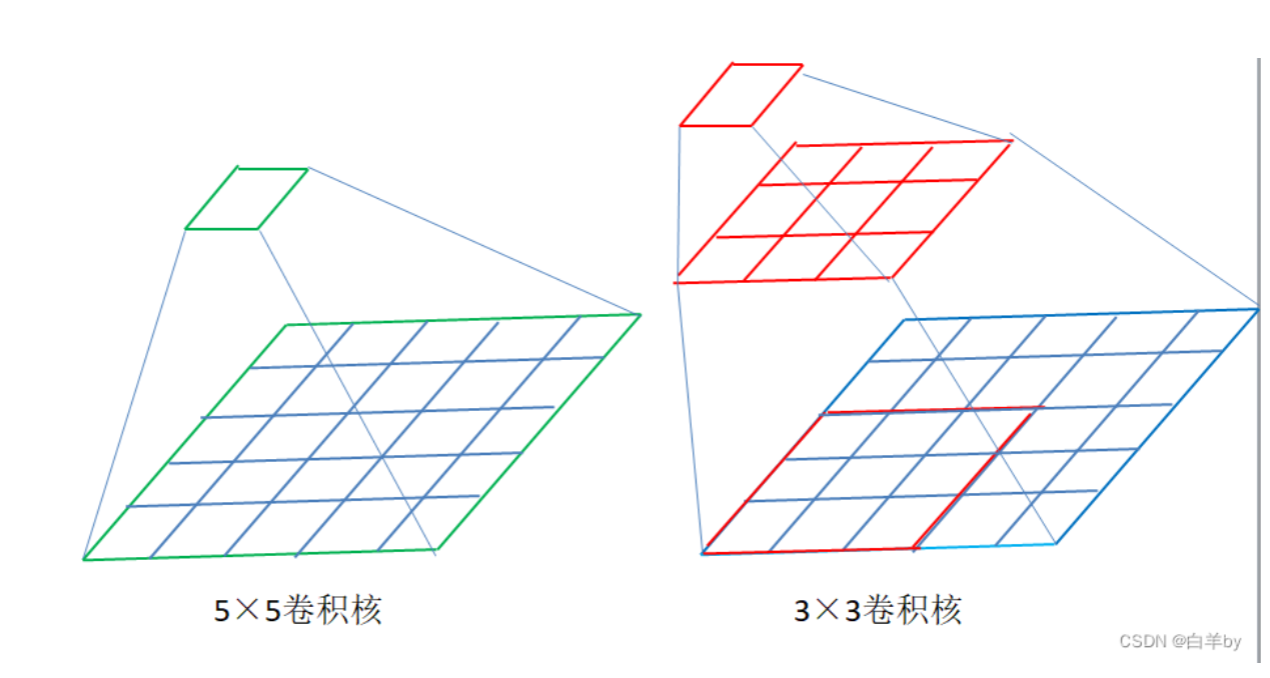
左边使用5*5的卷积核,参数量为25;右边使用两个3*3的卷积核,参数量为18
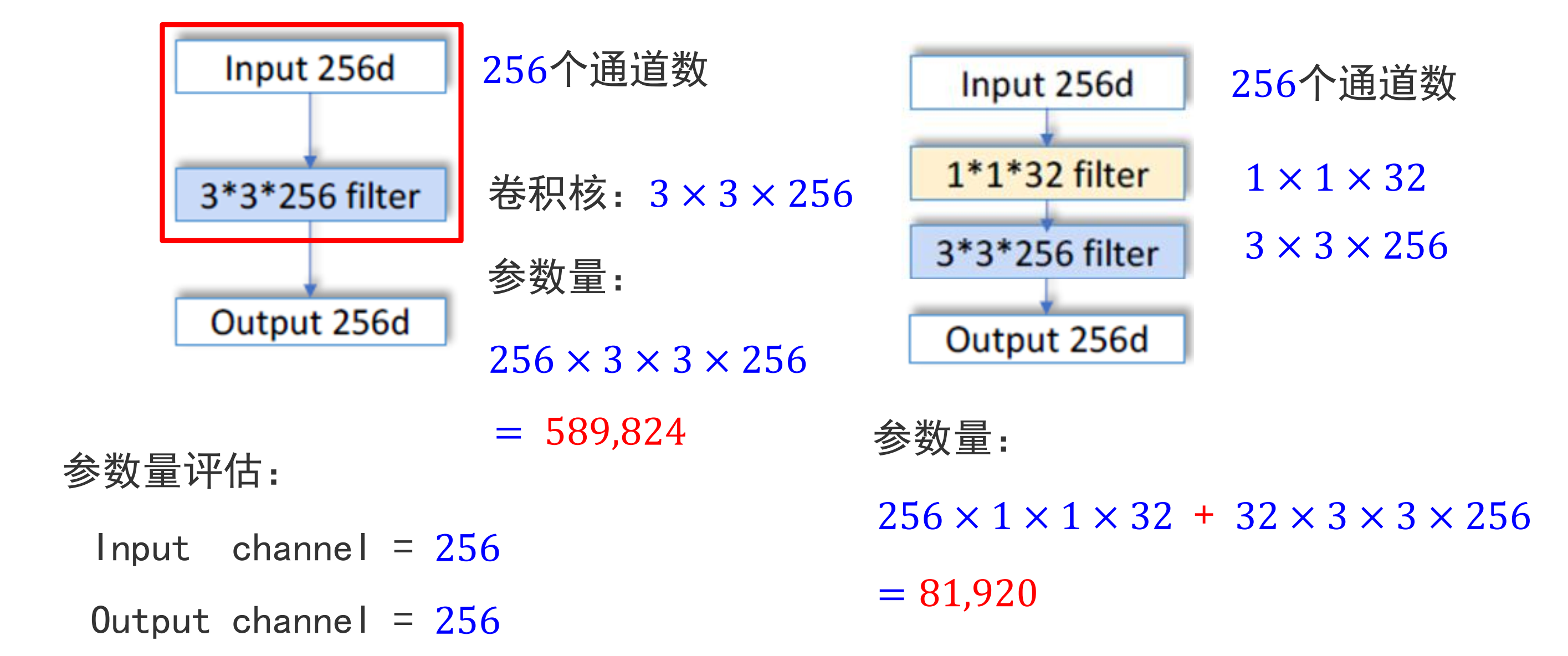
1*1卷积核
1*1卷积核可以用来降维,因为:
假设输入特征图的尺寸为 H×W×Cin,其中 H 是高度,W 是宽度,Cin 是输入通道数。使用 N 个1×1卷积核进行卷积操作,每个卷积核的大小为 1×1×Cin。经过卷积后,输出特征图的尺寸为 H×W×N。
当 N<Cin 时,就实现了降维操作。这是因为通过1×1卷积核的线性组合,将输入的 Cin 个通道映射到了 N 个通道,减少了特征图的通道数量。
采用了带动量的随机梯度下降
预初始化
先训练级别简单(浅层)的 𝑉𝐺𝐺 的 𝐴 模型(11层)作为预训练。然后用训练好的 𝐴 模型的权重去初始化后面更深的模型,加快训练的收敛速度

具体做法是:用网络 𝐴 模型前四个卷积层和最后三个全连接层参数的作为初始化参数
注意:比 𝐴 模型多余的层初始化仍采用随机初始化:均值 0,方差0.01 的正态分布;偏置初始化为 0
数据增强:
就是将图片先做各种预处理,增强模型在不同场景下识别图形的能力。
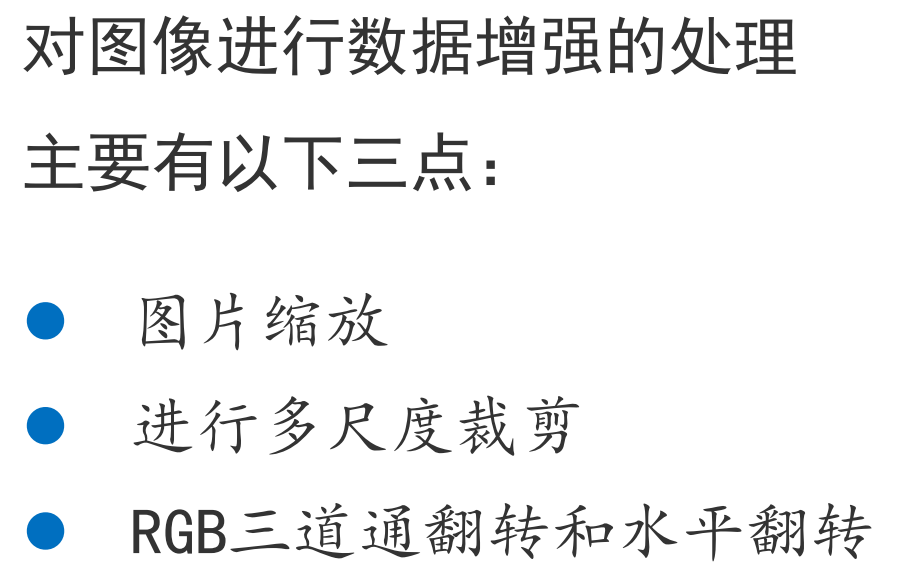
两种方法:单尺度和多尺度
在单尺度训练中,原图的短边被固定为一个固定值 𝑆 ,然后等比例缩放图片(正方形)。再从缩放的图片中裁剪 224 × 224 的子图用于训练模型
第二种方法是多尺度训练,即每个训练图像是独立随机地从 [𝑆𝑚𝑖𝑛 = 256, 𝑆𝑚𝑎𝑥 = 512]范围中随机抽样 𝑆 进行重新缩放
在多尺度训练中,每张图的短边随机为 256 到 512 之间的一个随机值,然后再从缩放的图片中随机裁剪 224 × 224 的子图
结论
更深的模型,效果更好(模型由A到E逐步加深,通过对比可得)
深层模型的泛化能力更好
参考代码:
class vggLayer(nn.Module):
def __init__(self,in_cha, mid_cha, out_cha):
super(vggLayer, self).__init__()
self.relu = nn.ReLU()
self.pool = nn.MaxPool2d(2)
self.conv1 = nn.Conv2d(in_cha, mid_cha, 3, 1, 1)
self.conv2 = nn.Conv2d(mid_cha, out_cha, 3, 1, 1)
def forward(self,x):
x = self.conv1(x)
x= self.relu(x)
x = self.conv2(x)
x = self.relu(x)
x = self.pool(x)
return xResNet
相当震撼的论文,详细解读放在另一篇帖子里了。
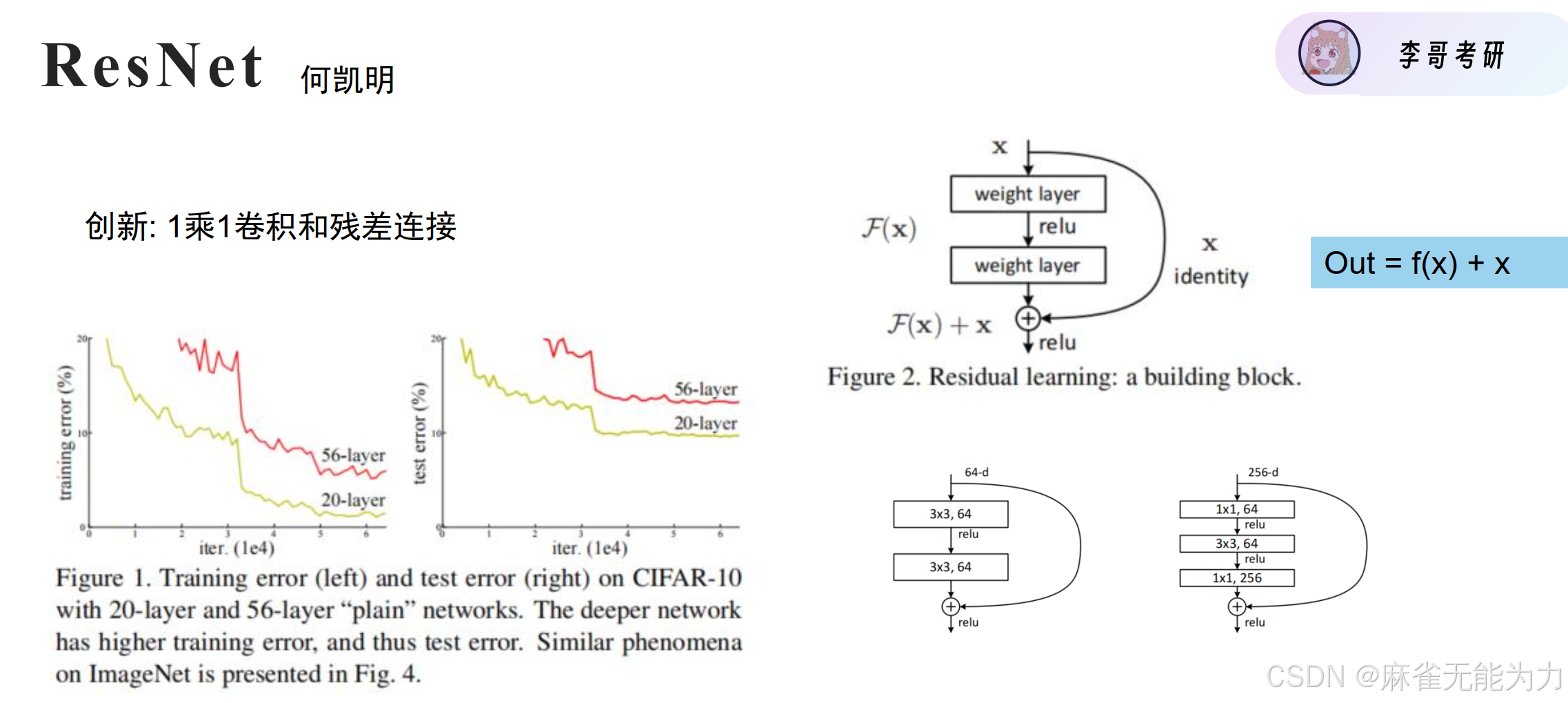
残差链接的作用:避免梯度消失
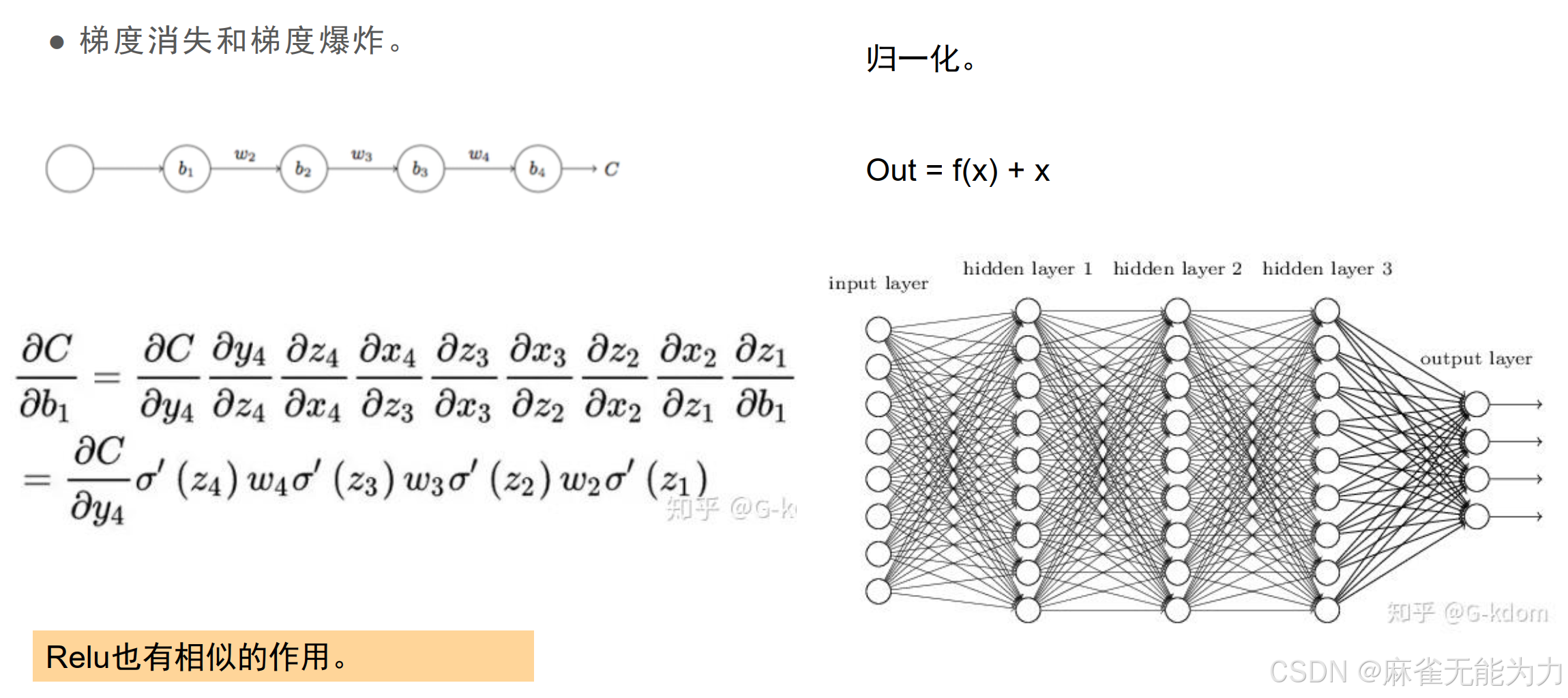
梯度消失:里层的参数计算梯度时是多次求偏导的结果,当偏导小于1时会越乘越小,最后趋近于0,为了避免这种情况采用f(x) + x的形式可以保证求偏导的结果至少大于1.
这也是为什么relu比sigmoid好的原因:
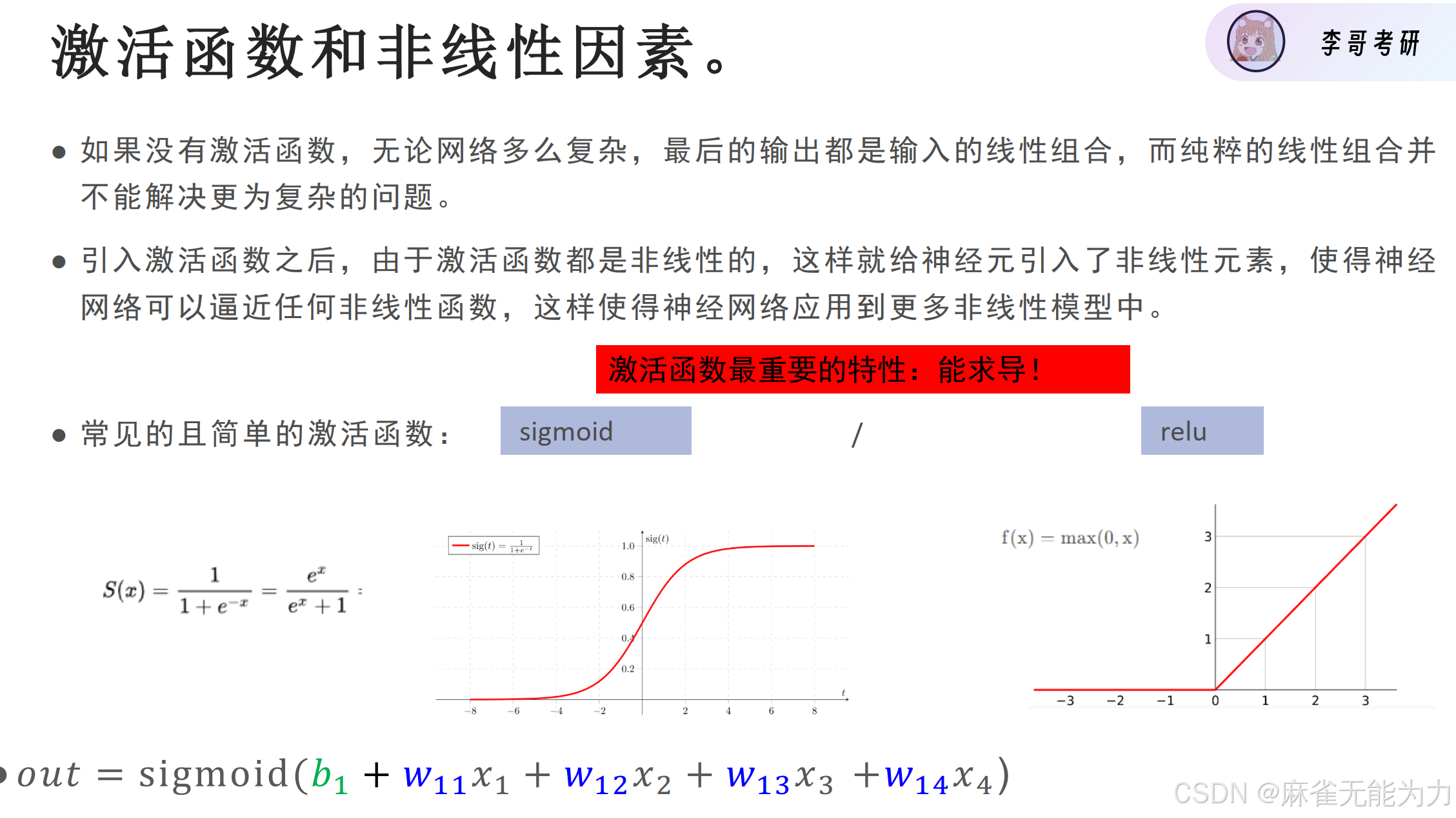
在右端sigmoid的梯度已经接近于0了
1乘1卷积:
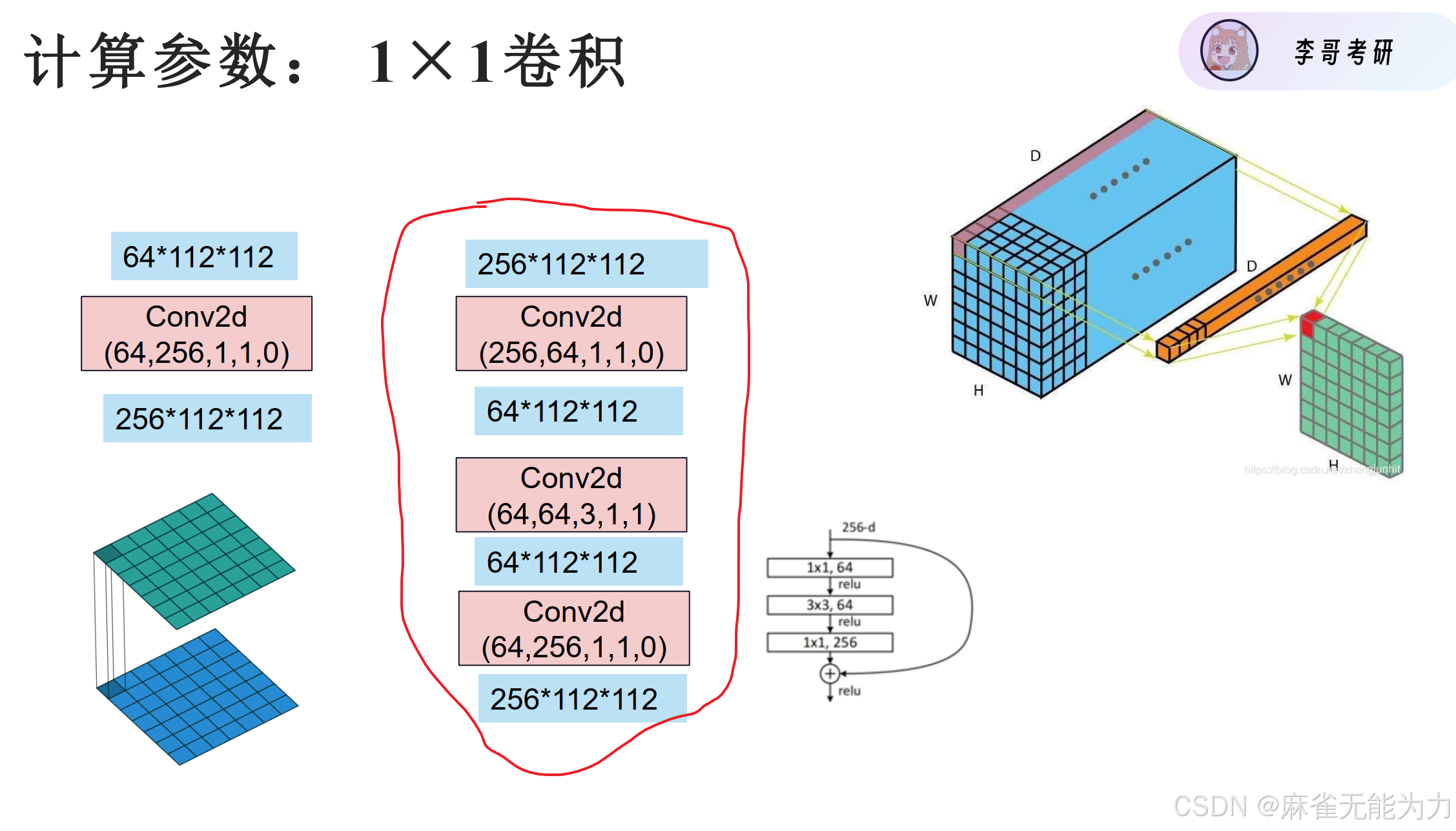
作用1:降低参数,减小计算量
原参数:256 * 256 * 3 * 3
降维后参数:256 * 64 * 1 * 1+ 64 * 64 * 3 * 3 + 64 * 256 * 1 * 1
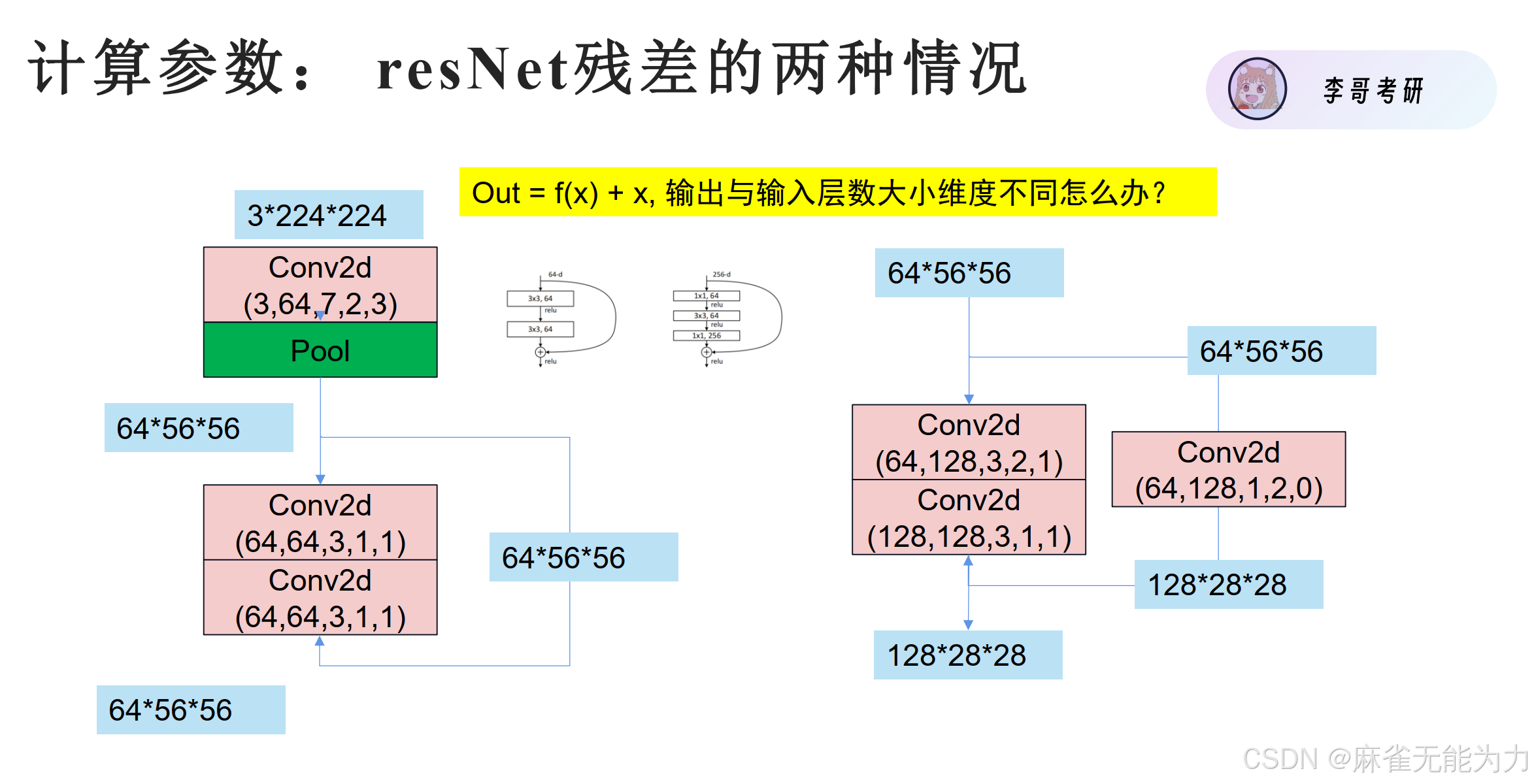
作用2:解决残差链接中输入输出特征图维度不同的问题:
总结一下卷积神经网络的主要模块:
代码展示:
import numpy as np
import paddle as paddle
import paddle.nn as nn
import paddle.nn.functional as F
from PIL import Image
import matplotlib.pyplot as plt
import os
print("本教程基于Paddle的版本号为:"+paddle.__version__)
from paddle.vision.transforms import Compose, Normalize
transform = Compose([Normalize(mean=[127.5], std = [127.5], data_format = 'CHW')])
print('下载并加载训练数据')
train_dataset = paddle.vision.datasets.MNIST(mode = 'train', transform = transform)
test_dataset = paddle.vision.datasets.MNIST(mode = 'test', transform = transform)
#看看数据长什么样子
train_data0, train_label_0 = train_dataset[0][0], train_dataset[0][1]
train_data0 = train_data0.reshape([28, 28])
plt.figure(figsize = (2,2))
print(plt.imshow(train_data0, cmap = plt.cm.binary))
print('train_data0的标签为:' + str(train_label_0))
#定义多层感知机模型
class mnist(paddle.nn.Layer):
def __init__(self):
super(mnist,self).__init__()
self.fc1 = nn.Linear(in_features = 28 * 28, out_features = 100)
self.fc2 = nn.Linear(in_features = 100, out_features = 100)
self.fc3 = nn.Linear(in_features = 100, out_features = 10)
def forward(self, input_):
x = paddle.reshape(input_, [input_.shape[0], -1])
x = self.fc1(x)
x = F.relu(x)
x = self.fc2(x)
x = F.relu(x)
x = self.fc3(x)
y = F.softmax(x)
return y
from paddle.metric import Accuracy
model = paddle.Model(mnist())
optim = paddle.optimizer.Adam(learning_rate = 0.001, parameters = model.parameters())
model.prepare(optim, paddle.nn.CrossEntropyLoss(), Accuracy())
model.fit(train_dataset,test_dataset,epochs = 2, batch_size = 64, save_dir = 'multilayer_perception', verbose = 1)
#模型预测
test_data0, test_label_0 = test_dataset[0][0], test_dataset[0][0]
test_data0 = test_data0.reshape([28, 28])
plt.figure(figsize = (2,2))
print(plt.imshow(test_data0, cmap = plt.cm.binary))
print('test_data0的标签为:' + str(test_label_0))
#模型预测
result = model.predict(test_dataset, batch_size = 1)
#打印模型预测结果
print('test_data0 预测的数值为:%d' % np.argsort(result[0][0])[0][-1])

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









