







ros学习笔记——用rviz播放激光点云数据包
首先 roscore 然后打开一个 rviz
然后启动数据包
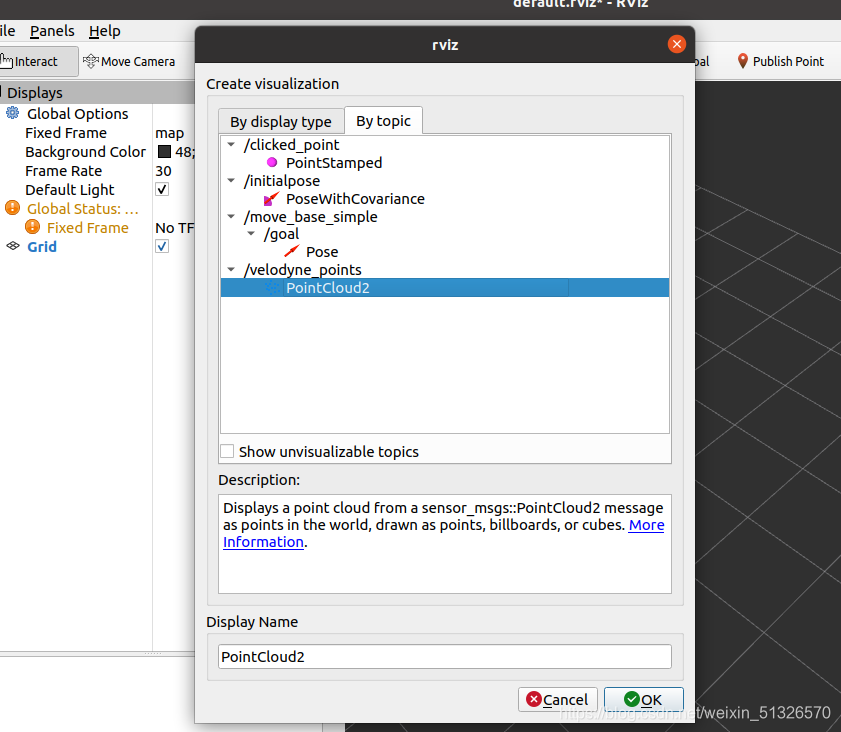
 我们这里在 add 下的By topic 下添加点云的话题
我们这里在 add 下的By topic 下添加点云的话题
看到的是下面的情况,无法直接播放点云数据包,这是因为rviz与点云的坐标系是不一致的,或者是没有关联的
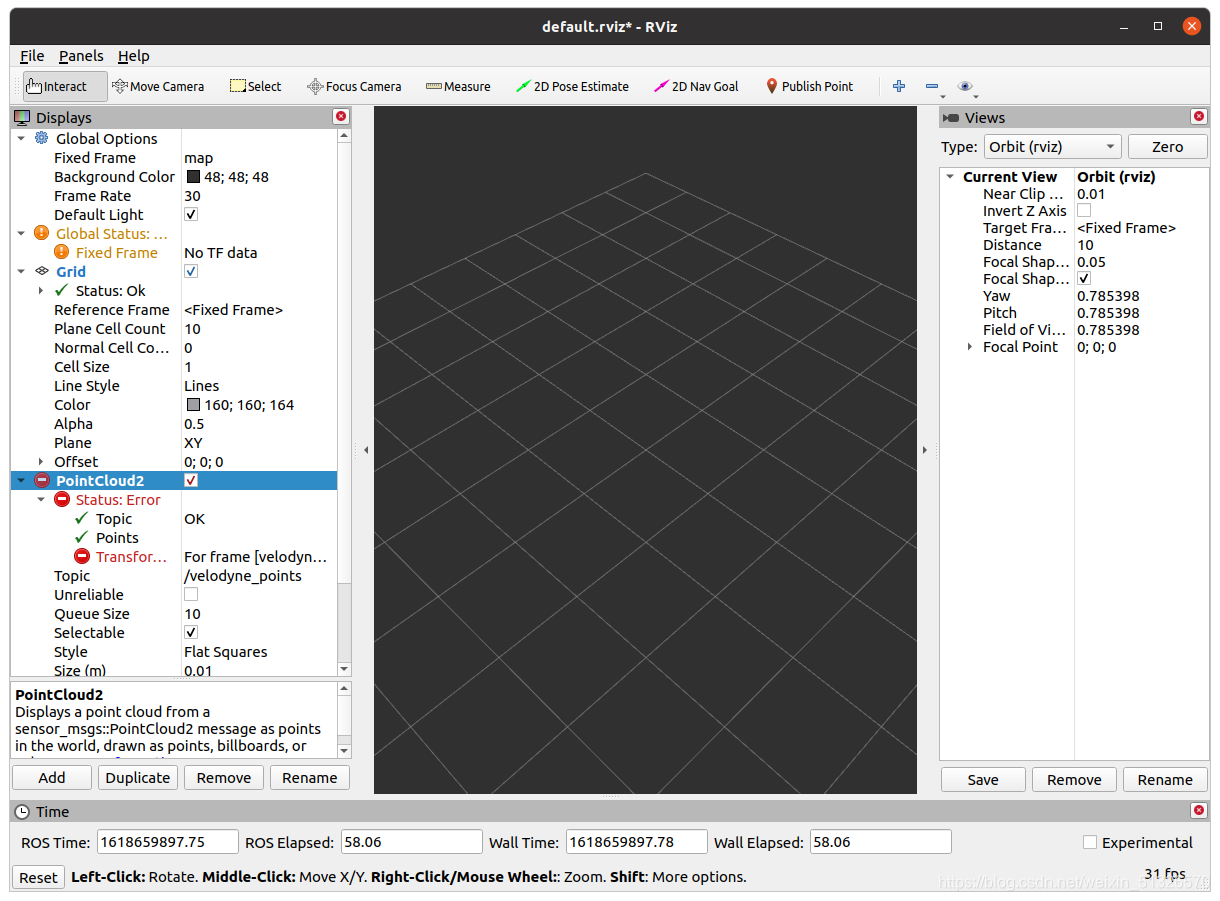
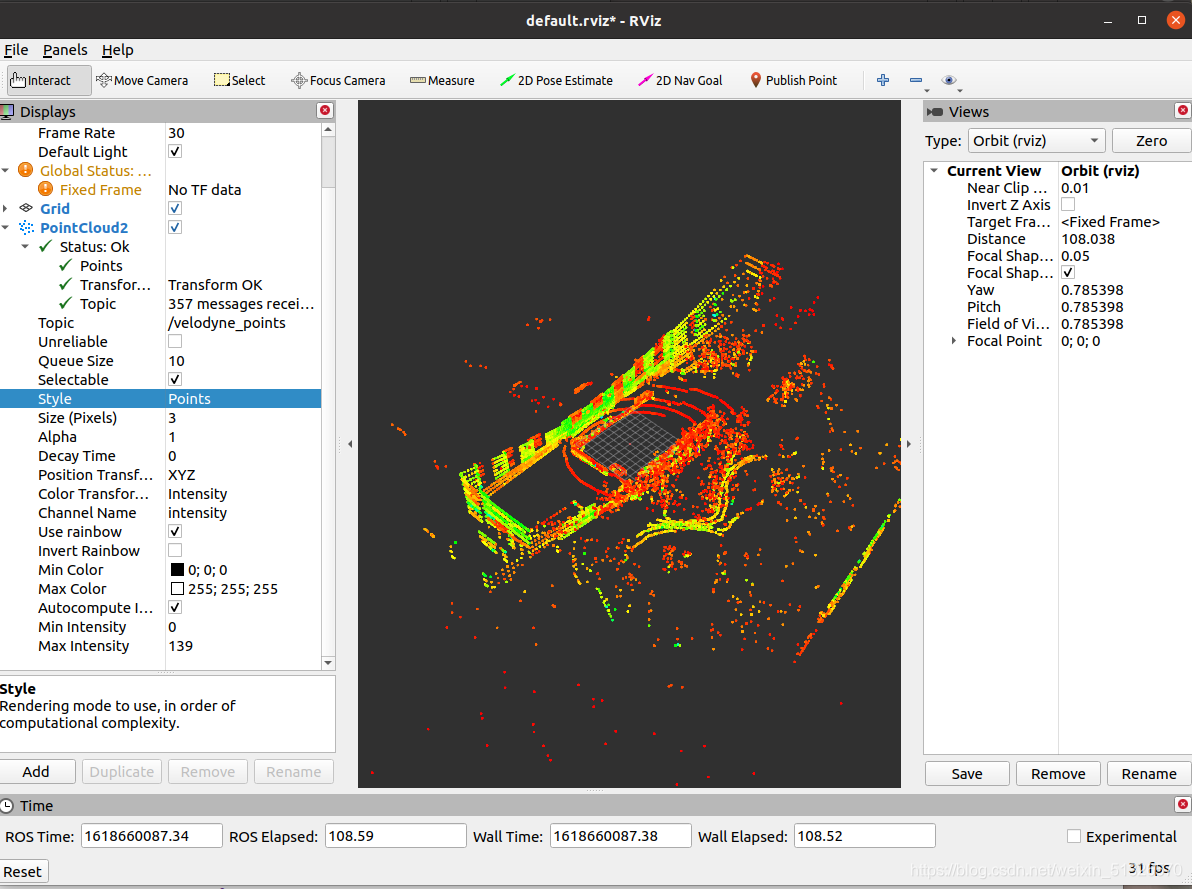
然后我们在这里输入指令,查询一下点云话题对应的坐标系,然后在 Fixed Frame 下的map坐标系删除,改成我们需要的坐标系即可,或者看上面那个报错的地方,也能得知对应的坐标系是啥For frame [velodyne]: Fixed Frame [camera_init] does not exist
rostopic echo /话题 | grep frame_id

这里我们改为点云输出类型,就可以看到效果了

















 873
873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









