






 本文详细解释了C代码中的PID控制器计算过程,涉及位置式和增量式PID模式,强调了误差处理、积分项的时间因素以及限幅操作在控制输出中的作用。
本文详细解释了C代码中的PID控制器计算过程,涉及位置式和增量式PID模式,强调了误差处理、积分项的时间因素以及限幅操作在控制输出中的作用。
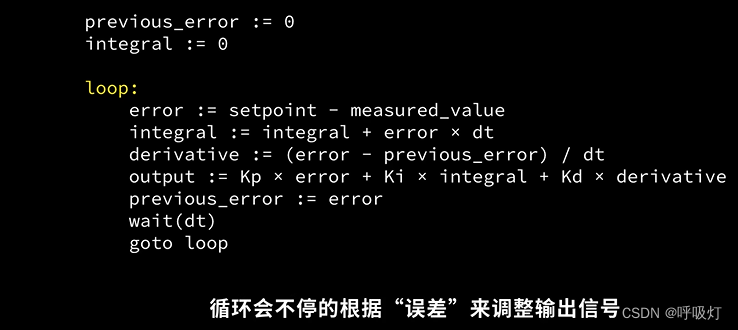
典型的PID计算
C代码
__IO float PID_calc(pid_type_def *pid, __IO float ref, __IO float set)
{
//判断传入的PID指针不为空
if (pid == NULL)
return 0.0f;
//存放过去两次计算的误差值
pid->error[2] = pid->error[1];
pid->error[1] = pid->error[0];
//设定目标值和当前值到结构体成员
pid->set = set;
pid->fdb = ref;
//计算最新的误差值
pid->error[0] = set - ref;
//判断PID设置的模式
if (pid->mode == PID_POSITION) //位置式PID
{
//比例项计算输出
pid->Pout = pid->Kp * pid->error[0];
//积分项计算输出
pid->Iout += pid->Ki * pid->error[0];
//存放过去两次计算的微分误差值
pid->Dbuf[2] = pid->Dbuf[1];
pid->Dbuf[1] = pid->Dbuf[0];
//当前误差的微分用本次误差减去上一次误差来计算
pid->Dbuf[0] = (pid->error[0] - pid->error[1]);
//微分项输出
pid->Dout = pid->Kd * pid->Dbuf[0];
//对积分项进行限幅
LimitMax(pid->Iout, pid->max_iout);
//叠加三个输出到总输出
pid->out = pid->Pout + pid->Iout + pid->Dout;
//对总输出进行限幅
LimitMax(pid->out, pid->max_out);
}
else if (pid->mode == PID_DELTA) //增量式PID
{
//以本次误差与上次误差的差值作为比例项的输入带入计算
pid->Pout = pid->Kp * (pid->error[0] - pid->error[1]);
//以本次误差作为积分项带入计算
pid->Iout = pid->Ki * pid->error[0];
//迭代微分项的数组
pid->Dbuf[2] = pid->Dbuf[1];
pid->Dbuf[1] = pid->Dbuf[0];
//以本次误差与上次误差的差值减去上次误差与上上次误差的差值作为微分项的输入带入计算
pid->Dbuf[0] = (pid->error[0] - 2.0f * pid->error[1] + pid->error[2]);
pid->Dout = pid->Kd * pid->Dbuf[0];
//叠加三个项的输出作为总输出
pid->out += pid->Pout + pid->Iout + pid->Dout;
//对总输出做一个先限幅
LimitMax(pid->out, pid->max_out);
}
return pid->out;
}疑惑,为什么积分项中没有了 时间

















 3873
3873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









