






一、介绍
1.1 概述
- Cartographer是一款可以跨多个平台和传感器配置提供2D和3D实时同步定位和绘图(SLAM)的系统。这个项目提供了Cartographer的ROS集成。
- Cartographer是google推出的一套基于图优化的SLAM算法。Cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。
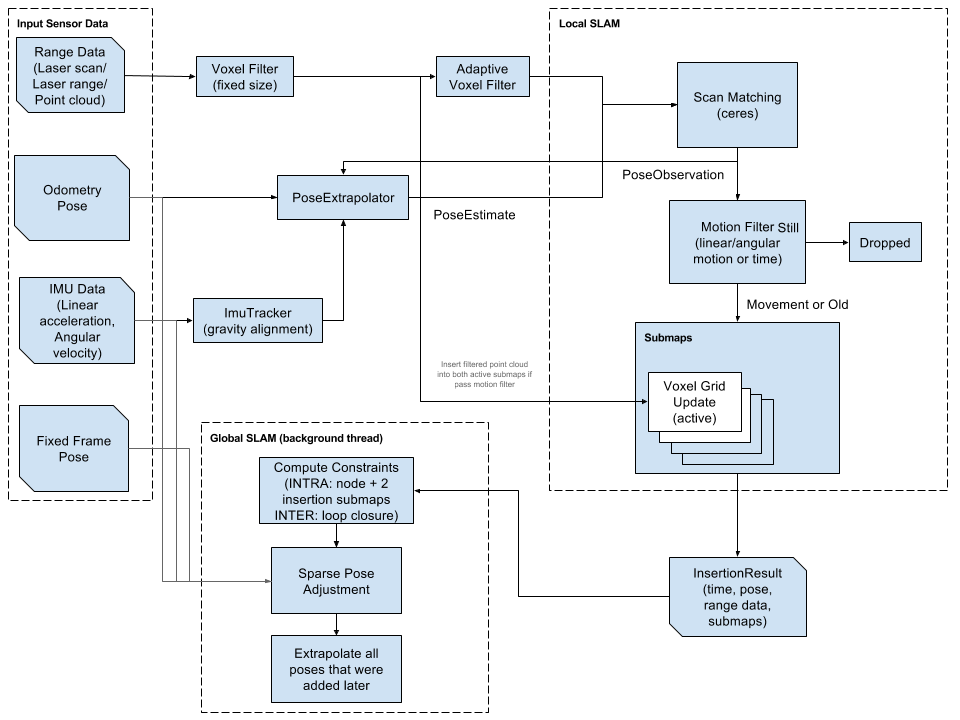
- 该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检测,来消除累积误差:当一个submap构建完成,也就是不会再有新的laser scan插入到该submap时,算法会将该submap加入到闭环检测中。闭环检测的本质也是一个优化问题,该优化问题被表达成了一个pixel-accurate match的形式,解决优化问题的方法是Branch-and-Bound Approach.
- Cartographer本身是一个C++的库,虽然可以不依赖ROS的环境运行,但为了快速的上手,google还是提供了一个ROS环境下的封装cartographer_ros。
1.2 特点
- 工程化代码,依赖少,算法设计精妙,能在嵌入式主控上运行。适合产品级应用;
- 支持 ROS
- 优秀的软件架构设计,便于接入IMU、(单/多线)雷达、里程计、甚至为二维码辅助等视觉识别方式也预留了接口(Landmark)。
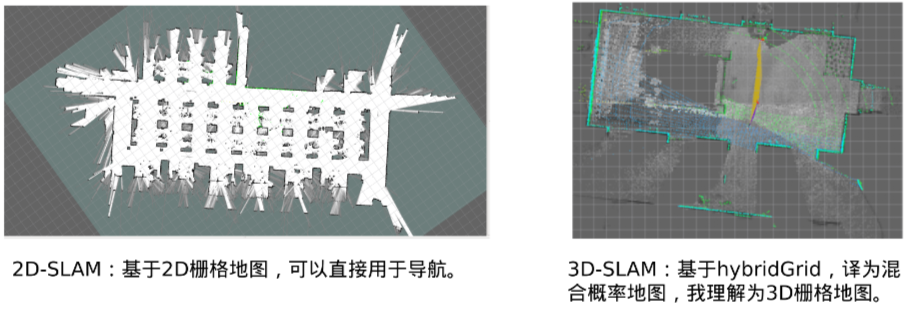
- Cartographer支持2D和3D激光雷达的输入,实现机器人定位,并构建栅格地图。
- 2D-SLAM:基于2D栅格地图,可以直接用于导航。
- 3D-SLAM:基于hybridGrid,译为混合概率地图。
1.3 cartographer建图原理
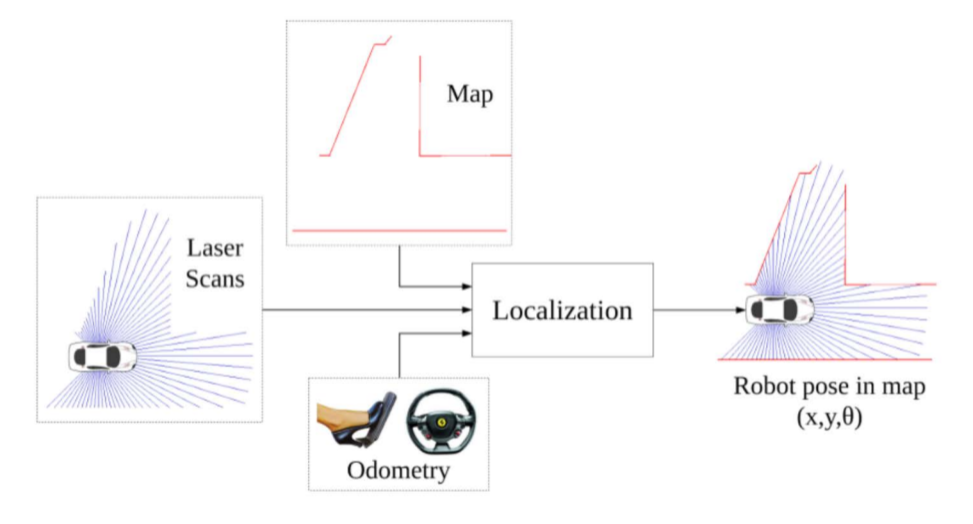
在建图的过程当中,传感器的信息非常重要。在ROS2当中,我们需要使用的传感器信息的方式非常的简单,即订阅传感器topic发布的信息,在接收信息之后,cartographer包会利用其内部的算法对其进行解析构建,进而建图。cartographer整体算法主要依赖的是激光雷达的数据。
因此我们在使用cartographer建图之前,我们需要先看懂这个算法是怎么拿到激光雷达的数据。一般购买雷达会附带相关驱动文件,但不一定适合你的ROS2版本,我使用的雷达是LD14,使用的是自己下载的驱动文件:乐动机器人传感器团队/ldlidar_sl_ros2
整体学习的逻辑顺序如下:
1.4 资料
Cartographer是一个支持多平台和传感器配置的SLAM的系统。
本文主要讲述在ros2 humble系统上cartographer的安装方法,以及如何配置参数实现自己的ros2 bag包的离线建图。
官方cartographer的github地址:https://github.com/ros2/cartographer
官方cartographer_ros的github地址:https://github.com/ros2/cartographer_ros
官方cartographer说明文档(非ROS2版本)地址:https://google-cartographer.readthedocs.io/en/latest/
官方cartographer_ros说明文档(非ROS2版本)地址:https://google-cartographer-ros.readthedocs.io/en/latest/
二、框架
三、激光雷达底层驱动
3.1 获取激光雷达的ROS2功能包
cd ros2_car_ws/src
git clone https://github.com/ldrobotSensorTeam/ldlidar_sl_ros2.git
3.2 系统设置
- 第一步,通过板载串口或者USB转串口模块(例如,CH9102模块)的方式使雷达连接到你的系统主板。
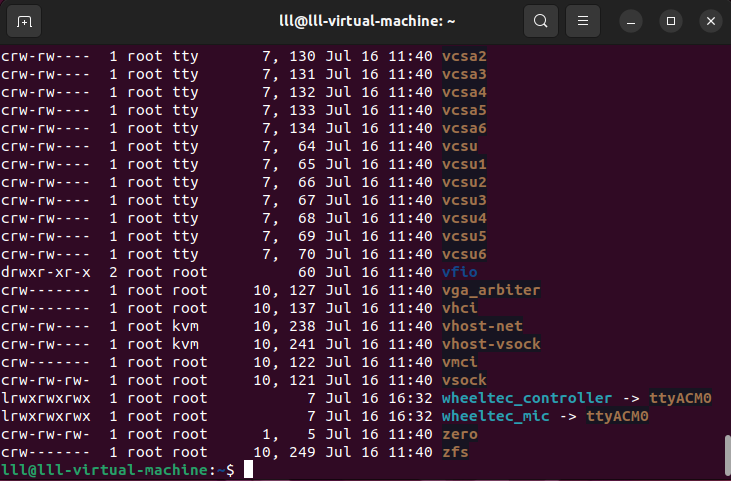
- 第二步,设置雷达在系统中挂载的串口设备-x权限(以/dev/ttyACM0为例)
实际使用时,根据雷达在你的系统中的实际挂载情况来设置,可以使用ls -l /dev命令查看。
如果串口有问题请看这里修改雷达串口:https://alidocs.dingtalk.com/i/p/yr9xmyAdgZWmEOejBYmaEgxWBBaAomNA
资料百度网盘:
链接:https://pan.baidu.com/s/18GjrOzh3jNqX2hnYmWuWwA?pwd=lcz0
提取码:lcz0
–来自百度网盘超级会员V6的分享
cd ~/ros2_car_ws
sudo chmod 777 /dev/ttyACM0
- 第三步,修改launch/目录下雷达产品型号对应的lanuch文件中的port_name值,以ld14.launch.py为例,如下所示。
#!/usr/bin/env python3
from launch import LaunchDescription
from launch_ros.actions import Node
'''
Parameter Description:
---
- Set laser scan directon:
1. Set counterclockwise, example: {'laser_scan_dir': True}
2. Set clockwise, example: {'laser_scan_dir': False}
- Angle crop setting, Mask data within the set angle range:
1. Enable angle crop fuction:
1.1. enable angle crop, example: {'enable_angle_crop_func': True}
1.2. disable angle crop, example: {'enable_angle_crop_func': False}
2. Angle cropping interval setting:
- The distance and intensity data within the set angle range will be set to 0.
- angle >= 'angle_crop_min' and angle <= 'angle_crop_max' which is [angle_crop_min, angle_crop_max], unit is degress.
example:
{'angle_crop_min': 135.0}
{'angle_crop_max': 225.0}
which is [135.0, 225.0], angle unit is degress.
'''
def generate_launch_description():
# LDROBOT LiDAR publisher node
ldlidar_node = Node(
package='ldlidar_sl_ros2',
executable='ldlidar_sl_ros2_node',
name='ldlidar_publisher_ld14',
output='screen',
parameters=[
{'product_name': 'LDLiDAR_LD14'},
{'laser_scan_topic_name': 'scan'},
{'point_cloud_2d_topic_name': 'pointcloud2d'},
{'frame_id': 'base_laser'},
{'port_name': '/dev/ttyACM0'},
{'serial_baudrate' : 115200},
{'laser_scan_dir': True},
{'enable_angle_crop_func': False},
{'angle_crop_min': 135.0},
{'angle_crop_max': 225.0}
]
)
# base_link to base_laser tf node
base_link_to_laser_tf_node = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_link_to_base_laser_ld14',
arguments=['0','0','0.18','0','0','0','base_link','base_laser']
)
# Define LaunchDescription variable
ld = LaunchDescription()
ld.add_action(ldlidar_node)
ld.add_action(base_link_to_laser_tf_node)
return ld
3.3 编译运行
cd ~/ros2_car_ws
colcon build
source install/local_setup.bash
3.4 启动激光雷达节点
-
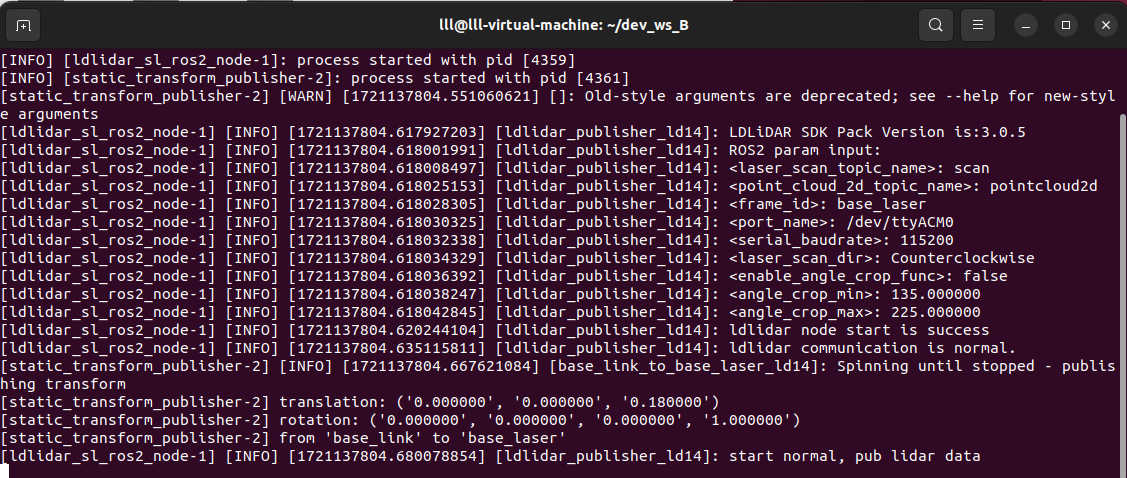
启动ld14 lidar node
ros2 launch ldlidar_sl_ros2 ld14.launch.py -
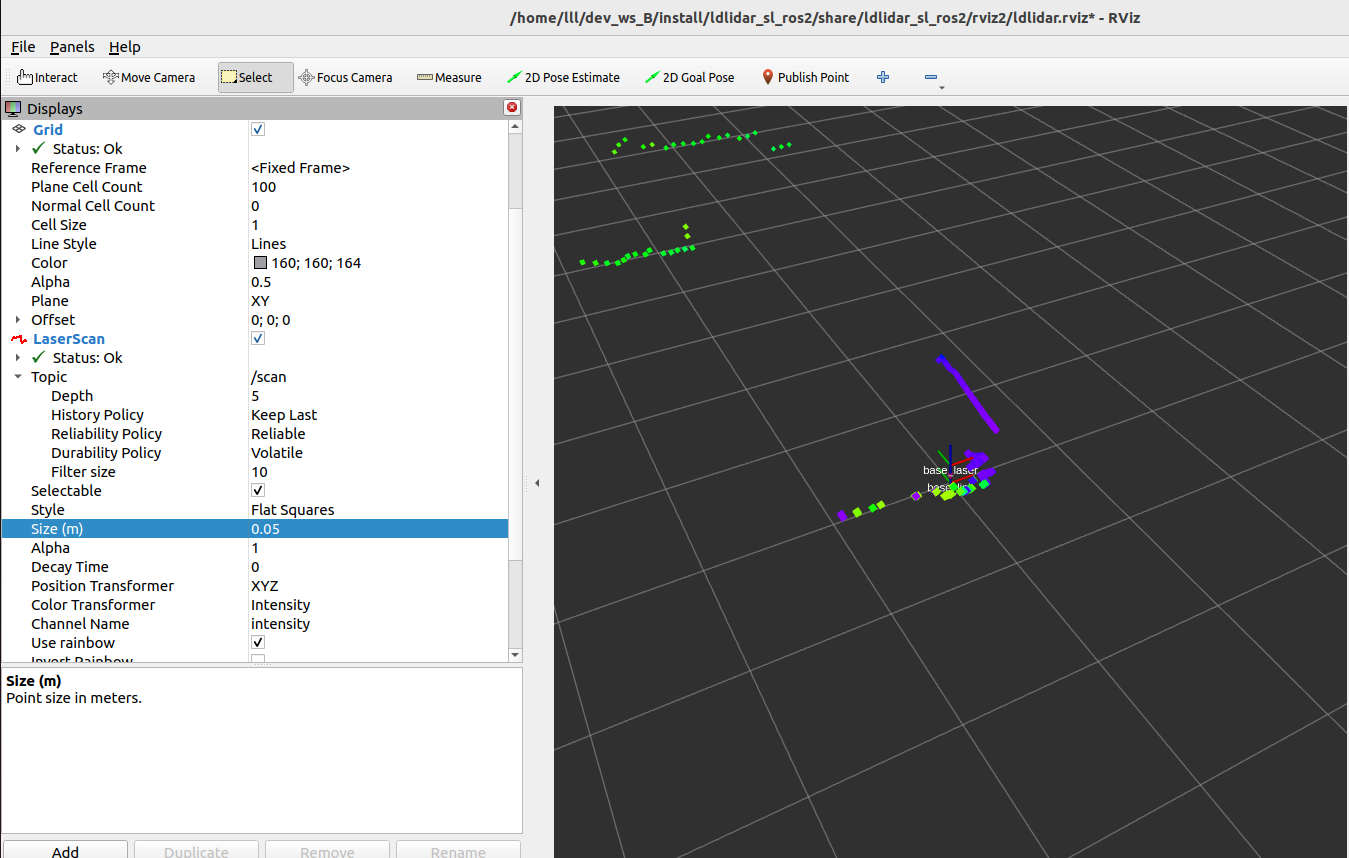
启动ld14 lidar node并显示激光数据在Rviz2上
ros2 launch ldlidar_sl_ros2 viewer_ld14.launch.py
第一条命令运行结果
第二条运行结果
3.5 启动文件
viewer_ld14.launch.py
#!/usr/bin/env python3
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
# RViZ2 settings
rviz2_config = os.path.join(
get_package_share_directory('ldlidar_sl_ros2'),
'rviz2',
'ldlidar.rviz'
)
rviz2_node = Node(
package='rviz2',
executable='rviz2',
name='rviz2_show_ld14',
arguments=['-d',rviz2_config],
output='screen'
)
#Include LDLidar launch file
ldlidar_launch = IncludeLaunchDescription(
launch_description_source=PythonLaunchDescriptionSource([
get_package_share_directory('ldlidar_sl_ros2'),
'/launch/ld14.launch.py'
])
)
# Define LaunchDescription variable
ld = LaunchDescription()
ld.add_action(ldlidar_launch)
ld.add_action(rviz2_node)
return ld
这段代码启动了两个节点:
- RViZ2 节点:这个节点用于显示 RViZ2 界面,并加载特定的配置文件 ldlidar.rviz。
- LDLiDAR 节点:这个节点通过包含另一个 launch 文件 ld14.launch.py 来启动 LDLiDAR。这个 launch 文件位于 ldlidar_sl_ros2 包的 launch 目录中
而ld14.launch.py又定义了两个节点
#!/usr/bin/env python3
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
# LDROBOT LiDAR publisher node
ldlidar_node = Node(
package='ldlidar_sl_ros2',
executable='ldlidar_sl_ros2_node',
name='ldlidar_publisher_ld14',
output='screen',
parameters=[
{'product_name': 'LDLiDAR_LD14'},
{'laser_scan_topic_name': 'scan'},
{'point_cloud_2d_topic_name': 'pointcloud2d'},
{'frame_id': 'base_laser'},
{'port_name': '/dev/ttyACM0'},
{'serial_baudrate' : 115200},
{'laser_scan_dir': True},
{'enable_angle_crop_func': False},
{'angle_crop_min': 135.0},
{'angle_crop_max': 225.0}
]
)
# base_link to base_laser tf node
base_link_to_laser_tf_node = Node(
package='tf2_ros',
executable='static_transform_publisher',
name='base_link_to_base_laser_ld14',
arguments=['0','0','0.18','0','0','0','base_link','base_laser']
)
# Define LaunchDescription variable
ld = LaunchDescription()
ld.add_action(ldlidar_node)
ld.add_action(base_link_to_laser_tf_node)
return ld
- LDLiDAR 节点:用于发布激光雷达的数据。
- 静态坐标变换节点:用于定义从 base_link 到 base_laser 的静态变换。
这里,其实大部分都没有什么东西,但是我们需要重点关注的是frame_id这个东西
此时我们查看话题
ros2 topic list
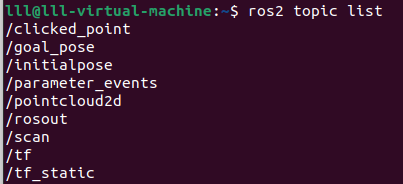
后续利用scan和base_laser来建图。
3.6 frame_id理解理解学习
要看懂这个参数,我们先来看一下ros2中激光雷达的消息接口有一些什么消息即这个接口
Sensor_msgs/msg/LaserScan
使用查看一下接口的消息类型
ros2 interface show sensor_msgs/msg/LaserScan
返回
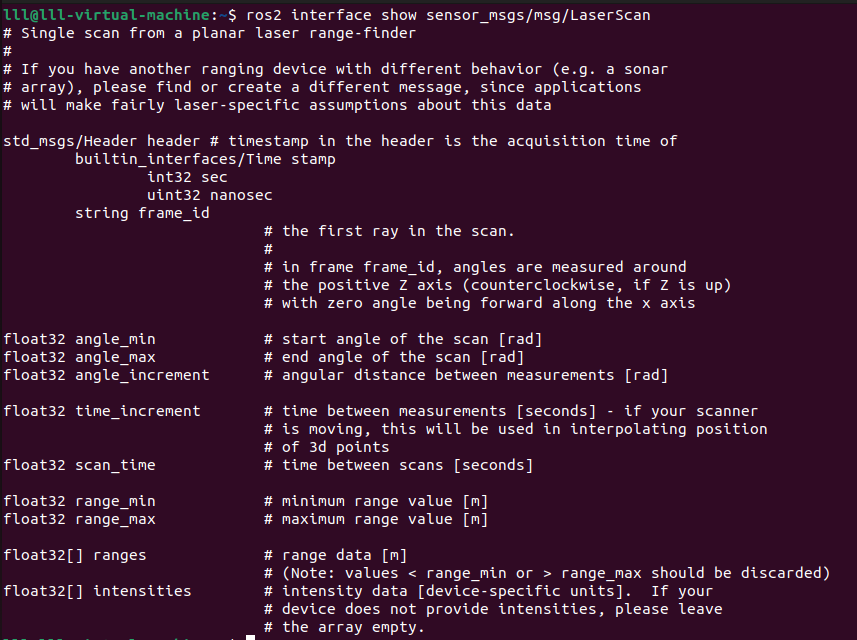
消息头有三部分的数据,int32 sec,uint32 nanosec,string frame_id,这三个参数的理解就是
sec和nanosec就是时间戳,代表着发布消息的秒和纳秒。
frame_id 是消息中与数据相关联的参考系id,例如在在激光数据中,frame_id对应激光数据采集的参考系(坐标系)。
因此,frame_id就是某一个物体的参考系的坐标名字。
四、cartographer建图过程
cartographer就是ROS2的一个功能包,和我们自己在ROS2的工作空间下建立的功能包是一个道理。我们如果需要使用这个功能包,其实只需要简单的用launch文件启动这个功能包里面所带有的节点,然后启动我们自己激光雷达的节点,然后cartographer订阅激光雷达节点发布的消息,当然,接收的消息格式和接收的节点的名字都需要我们一开始配置好,也就是使用.lua和.launch.py(在ROS2中)文件。
4.1 安装cartographer
由于ROS2发布了许多的版本,因此,我们在要安装适配于自己版本的包之前可以先查看能适配的包
# 查找符合的包
sudo apt-cache search cartographer
返回了许多与humble有关的包,我们安装这两个
sudo apt install ros-humble-cartographer ros-humble-cartographer-ros
sudo apt install ros-humble-navigation2
等待安装完之后,查看是否有安装好
ros2 pkg list | grep cartogrpaher
返回 即代表安装好
cartographer_ros
cartographer_ros_msgs
在安装完了cartographer之后,其实我们就可以理解成我们在Ubuntu里面安装了一个ROS2的功能包,只是这个功能包并不在我们自己的功能区下面,所以我们只需要启动这个功能包,他就能发布他自己的node和topic。
4.2 .launch.py文件
在下载了cartographer包之后,我们可以根据launch文件的名字来选择我们需要的文件,命名规则如下:
按照功能划分,分为以下几类:
(1)利用已有数据集进行2d/3d建图,如demo_backpack_2d.launch(其又调用了backpack_2d.launch)
(2)利用先验地图及数据集进行全局定位,如demo_backpack_2d_localization.launch
(3)显示pbstream文件launch文件命名规则标明了其作用:用户根据需要选择launch文件
- offline_backpack_2d.launch:离线快速构建全局地图,事先记录的数据集被多倍快速播放
- demo_backpack_2d_localization.launch:基于先验地图进行全局定位
- demo_backpack_2d.launch:同时定位和建图,需要跑数据包
- backpack_2d.launch:同时定位和建图,使用真实的传感器数据
- assets_writer_my_robot.launch:用于从.pbstream先前 Cartographer 执行的记录中提取数据。
根据网上给出的建议,我们最好从cartographer官方给出的配置文件进行修改,因此,拿出官网的一个.lua和.launch.py文件进行学习和修改
这里参考的demo_backpack_2d.launch.py和backpack_2d.launch.py;(参考demo_revo_lds.launch.py更好,只用一个文件即可)
ros2 humble cartographer会下载到电脑的路径为
/opt/ros/humble/share/cartographer_ros/launch
参考网址:
cartographer官网
# demo_my_robot_2d.launch.py
def generate_launch_description():
## ***** Launch arguments *****
bag_filename_arg = DeclareLaunchArgument('bag_filename')
## ***** Nodes *****
backpack_2d_launch = IncludeLaunchDescription(
PythonLaunchDescriptionSource(FindPackageShare('cartographer_ros').find('cartographer_ros') + '/launch/my_robot_2d.launch.py'),
launch_arguments = {'use_sim_time': 'True'}.items()
)
rviz_node = Node(
package = 'rviz2',
executable = 'rviz2',
on_exit = Shutdown(),
arguments = ['-d', FindPackageShare('cartographer_ros').find('cartographer_ros') + '/configuration_files/demo_2d.rviz'],
parameters = [{'use_sim_time': True}],
)
ros2_bag_play_cmd = ExecuteProcess(
cmd = ['ros2', 'bag', 'play', LaunchConfiguration('bag_filename'), '--clock'],
name = 'rosbag_play',
)
return LaunchDescription([
# Launch arguments
bag_filename_arg,
# Nodes
backpack_2d_launch,
rviz_node,
ros2_bag_play_cmd
])
# my_robot_2d.launch.py
def generate_launch_description():
## ***** Launch arguments *****
use_sim_time_arg = DeclareLaunchArgument('use_sim_time', default_value = 'False')
## ***** File paths ******
pkg_share = FindPackageShare('cartographer_ros').find('cartographer_ros')
'''
去掉了urdf以及robot_state_publisher_node
'''
# 修改为my_robot_2d.lua 文件 以及 激光雷达话题remapping(一个激光雷达的话,映射为scan即可;多个激光雷达需要映射为scan1、scan2...)
cartographer_node = Node(
package = 'cartographer_ros',
executable = 'cartographer_node',
parameters = [{'use_sim_time': LaunchConfiguration('use_sim_time')}],
arguments = [
'-configuration_directory', FindPackageShare('cartographer_ros').find('cartographer_ros') + '/configuration_files',
'-configuration_basename', 'my_robot_2d.lua'],
remappings = [
('scan', 'scan')],
output = 'screen'
)
cartographer_occupancy_grid_node = Node(
package = 'cartographer_ros',
executable = 'cartographer_occupancy_grid_node',
parameters = [
{'use_sim_time': True},
{'resolution': 0.05}],
)
return LaunchDescription([
use_sim_time_arg,
# Nodes
cartographer_node,
cartographer_occupancy_grid_node,
])
cartographer_node 节点中有一个remap的一个重映射,意思就是将前一个话题的名字重映射为后面的话题名字,就类似于一个改名的操作。
比如我cartographer订阅里程计话题名字odom,但是我发布的话题不是odom,我们可以使用remappings=[('odom', '/odometry/filtered')], 即可将cartographer订阅的话题名映射过去
4.3 .lua文件
ros2 humble cartographer会下载到电脑的路径为
/opt/ros/humble/share/cartographer_ros/configuration_files/
这里参考的revo_lds.lua;因为只用了激光雷达数据,所以tracking_frame、published_frame设置为雷达的坐标系base_link;
# my_robot_2d.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_pose_extrapolator = true,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options
参数含义:
-
map_frame: 构建地图所使用的坐标系,一般就使用我们前面提到的map即可
-
tracking_frame: SLAM算法跟踪的帧的ROS帧ID。如果要使用IMU,它应该在这个地方被选用,尽管它可能会漂移。常见的选择是“imu_link”。
tracking_frame一般设置为发布频率最高的传感器的frame_id,cartographer将会把其他数据都转移到该坐标系下进行计算。如果只使用雷达数据进行2D建图,那就只需要将其设置为雷达数据话题的frame_id,一般为laser。如果使用雷达数据+IMU进行2D或者3D建图,因为IMU的发布频率明显高于雷达,所以需要设置为imu数据话题的frame_id,一般imu_link。 -
published_frame: 要用作发布坐标的子帧的ROS帧ID。例如,如果“odom”框架由系统的不同部分提供,则设置为“odom“。在这种情况下,将发布map_frame中“odom”的坐标。否则,将其设置为“base_link”可能是合适的。
cartographer发布的tf树最后将指向published_frame,即published_frame不是cartographer提供的,这里如果没设置正确,tf树就不能连接成功,建图也就不能正常进行。这个一般设置为底盘的frame_id,也就是URDF文件中的底盘的link name,一般为base_link、base_footprint之类的名字。 -
odom_frame: 仅当
provide_odom_frame为true时使用。通常是“odom”。 -
provide_odom_frame: 如果enable, 则local, non-loop-closed, continuous pose 将作为 odom_frame发布在 map_frame.
- 在大多数情况下,设置 provide_odom_frame 为 true 是有意义的,因为它可以为其他节点提供一个 odom 坐标系,这些节点可以使用机器人的里程计数据来估计机器人的运动,而不必直接处理传感器数据。例如,可以使用 robot_localization 包来融合多个传感器数据,并估计机器人的位姿。
-
publish_frame_projected_to_2d: 如果enable, 则发布姿态将严格限制在纯2D位姿下(不包含roll pitch和z-offset坐标),这个可以防止出现一些由于
pose extrapolation step步骤出现的预期之外不需要的平面外姿态 -
use_odometry: 如果enable,则订阅topic为
odom中的nav_msgs/Odometry。这种情况下必须提供里程计.在SLAM过程中也会使用这个消息进行建图。注意:这里如果设置为true,则需要在ROS2节点中发布一个名为odom的topic让carto订阅 -
use_nav_sat: 如果enable, 则订阅主题为
fix中的sensor_msgs/NavSatFix。这种情况下必须要使用导航数据 -
use_landmarks:如果enable,则订阅主题为
landmarks中的cartographer_ros_msgs/LandmarkList,必须提供LandmarkLists数据,如1cartographer_ros_msgs/LandmarkEntry中的cartographer_ros_msgs/LandmarkList -
num_laser_scans: 要订阅的
laser scan的主题数量。为1时,订阅sensor_msgs/LaserScan中的scan主题,或者为多台激光扫描订阅主题的scan_1,scan_2 -
num_multi_echo_laser_scans: 要订阅的
multi-echo laser scan的主题数量,为1时,订阅echoes下的sensor_msgs/MultiEchoLaserScan,或者多个echoes_1, echoes_2 -
num_subdivisions_per_laser_scan: 将每个接收到的(多回波)激光扫描分成的点云数。细分扫描可以使扫描仪移动时获取的扫描不变形。有一个相应的轨迹生成器选项,可以将细分的扫描累积到一个点云中,用于扫描匹配。若把默认10改为1,1/1=1等于不分割
-
num_point_clouds: 要订阅的
point cloud的主题数量。为1时,订阅points2主题的sensor_msgs/PointCloud2,或者为多台点云订阅主题的points2_1,points2_2 -
lookup_transform_timeout_sec: 用于使用tf2查找转换的超时秒数。
-
submap_publish_period_sec: 发布子图姿势的时间间隔(以秒为单位),例如 0.3 秒。
-
pose_publish_period_sec: 发布姿势的时间间隔(以秒为单位),例如 5e-3 表示频率为 200 Hz。
-
publish_to_tf: 启用或禁用提供 TF 转换
-
publish_tracked_pose: 允许将跟踪姿势作为geometry_msgs/PoseStamped 发布到主题“tracked_pose”。
-
trajectory_publish_period_sec: 发布轨迹标记的时间间隔(以秒为单位),例如 30e-3 30 毫秒。
-
rangefinder_sampling_ratio:测距仪消息的固定比率采样。
-
odometry_sampling_ratio: 里程计消息的固定比率采样。
-
fixed_frame_sampling_ratio: 固定帧消息的固定比率采样。
-
imu_sampling_ratio IMU: IMU消息的固定比率采样。
-
landmarks_sampling_ratio: 地标消息的固定比率采样。
-
use_pose_extrapolator: Node里的位姿估计器,作用是融合里程计和IMU,推测出一个位姿。 如果use_pose_extrapolator参数为true,发布出的这个位姿不准,因为是先验的位姿,没有经过雷达校准,除非IMU和里程计特别准。因此这个参数一般都是false。如果参数
publish_tracked_pose为false,use_pose_extrapolator其实就无效了
TF2是ROS2使用的坐标转换的工具
因此,我们其实可以根据我们自己的需求来配置我们所需要的.lua文件
除此之外,我们还可以配置两个文件中的参数,也就是头文件中引入的"map_builder.lua"和 "trajectory_builder.lua"
map_builder.lua 参数理解
include "pose_graph.lua"
MAP_BUILDER = {
use_trajectory_builder_2d = false, //是否使用2d建图
use_trajectory_builder_3d = false, //是否使用3d建图
num_background_threads = 4, //使用几线程
pose_graph = POSE_GRAPH,
collate_by_trajectory = false,
//用于控制是否将数据按照轨迹进行分组。
//如果将 collate_by_trajectory 设置为 true,则 Cartographer 将会按照每个轨迹的 ID 将数据进行分组。在建图过程中,Cartographer 将每个轨迹的数据单独处理,然后将它们合并到最终地图中。这对于多个轨迹的数据进行建图时非常有用。
//如果将 collate_by_trajectory 设置为 false,则 Cartographer 将忽略轨迹信息,并将所有数据都视为同一个轨迹进行处理。在这种情况下,Cartographer 会将所有数据合并到一起进行建图,生成一个单一的地图。
}
trajectory_builder_2d.lua 参数理解
-- Copyright 2016 The Cartographer Authors
--
-- Licensed under the Apache License, Version 2.0 (the "License");
-- you may not use this file except in compliance with the License.
-- You may obtain a copy of the License at
--
-- http://www.apache.org/licenses/LICENSE-2.0
--
-- Unless required by applicable law or agreed to in writing, software
-- distributed under the License is distributed on an "AS IS" BASIS,
-- WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-- See the License for the specific language governing permissions and
-- limitations under the License.
TRAJECTORY_BUILDER_2D = {
use_imu_data = true, --是否使用imu数据
min_range = 0., --激光的最近距离
max_range = 30., --激光的最远距离
min_z = -0.8, --激光的最小高度
max_z = 2., --激光的最大高度
missing_data_ray_length = 5., --如果不在min_range和max_range之间,则默认给这个数值
num_accumulated_range_data = 1, --积累几帧激光数据作为一个Node节点
voxel_filter_size = 0.025, --一帧激光的网格滤波大小,单位为米。
adaptive_voxel_filter = { --自适应滤波,就是自适应调整滤波网格的大小、使得点云数量刚刚好大于最小点云数量,同时又不过多。
max_length = 0.5, -- 初始网格滤波的大小,单位为米
min_num_points = 200, --最小点云数据
max_range = 50., --点云的最远距离
},
loop_closure_adaptive_voxel_filter = { --闭环检测自适应滤波
max_length = 0.9, --同上
min_num_points = 100, --同上
max_range = 50., --同上
},
use_online_correlative_scan_matching = false, --使用CSM激光匹配
real_time_correlative_scan_matcher = { --快速CSN激光匹配
linear_search_window = 0.1, --平移搜索范围
angular_search_window = math.rad(20.), --角度搜索范围
translation_delta_cost_weight = 1e-1, --平移代价权重,就是距离初始值越远,匹配得分要越高才能被信任
rotation_delta_cost_weight = 1e-1, --旋转代价权重,同上
},
ceres_scan_matcher = { --使用ceres优化的方式进行激光匹配
occupied_space_weight = 1., --占据空间权重
translation_weight = 10., --平移权重
rotation_weight = 40., --旋转权重
ceres_solver_options = { --ceres优化参数
use_nonmonotonic_steps = false, --使用非单调的步骤,这个功能再明确一下
max_num_iterations = 20, --最大迭代次数
num_threads = 1, --使用几个线程优化
},
},
motion_filter = { --移动滤波,就是判断小车有没有动,就是检测2帧激光数据是否相似,要满足一下全部条件
max_time_seconds = 5., --2帧激光时间戳小间隔
max_distance_meters = 0.2, --2帧激光最小距离
max_angle_radians = math.rad(1.), --2帧激光最小角度
},
-- TODO(schwoere,wohe): Remove this constant. This is only kept for ROS.
imu_gravity_time_constant = 10., --imu的重力常数
pose_extrapolator = { --位姿推断
use_imu_based = false, --3d用来初始化位姿推断器的方式
constant_velocity = {
imu_gravity_time_constant = 10., --imu的重力常数
pose_queue_duration = 0.001,
},
imu_based = { --这个还不清楚
pose_queue_duration = 5.,
gravity_constant = 9.806,
pose_translation_weight = 1.,
pose_rotation_weight = 1.,
imu_acceleration_weight = 1.,
imu_rotation_weight = 1.,
odometry_translation_weight = 1.,
odometry_rotation_weight = 1.,
solver_options = {
use_nonmonotonic_steps = false;
max_num_iterations = 10;
num_threads = 1;
},
},
},
submaps = { --子图
num_range_data = 90, --子图中Node的数量
grid_options_2d = {
grid_type = "PROBABILITY_GRID", --概率栅格地图
resolution = 0.05, --分辨率
},
range_data_inserter = {
range_data_inserter_type = "PROBABILITY_GRID_INSERTER_2D",
probability_grid_range_data_inserter = {
insert_free_space = true,
hit_probability = 0.55,
miss_probability = 0.49,
},
tsdf_range_data_inserter = {
truncation_distance = 0.3,
maximum_weight = 10.,
update_free_space = false,
normal_estimation_options = {
num_normal_samples = 4,
sample_radius = 0.5,
},
project_sdf_distance_to_scan_normal = true,
update_weight_range_exponent = 0,
update_weight_angle_scan_normal_to_ray_kernel_bandwidth = 0.5,
update_weight_distance_cell_to_hit_kernel_bandwidth = 0.5,
},
},
},
}
# 使用激光建2D时候,一般把use_online_correlative_scan_matching(使用CSM激光匹配)设置为true,
4.4 建图与地图保存
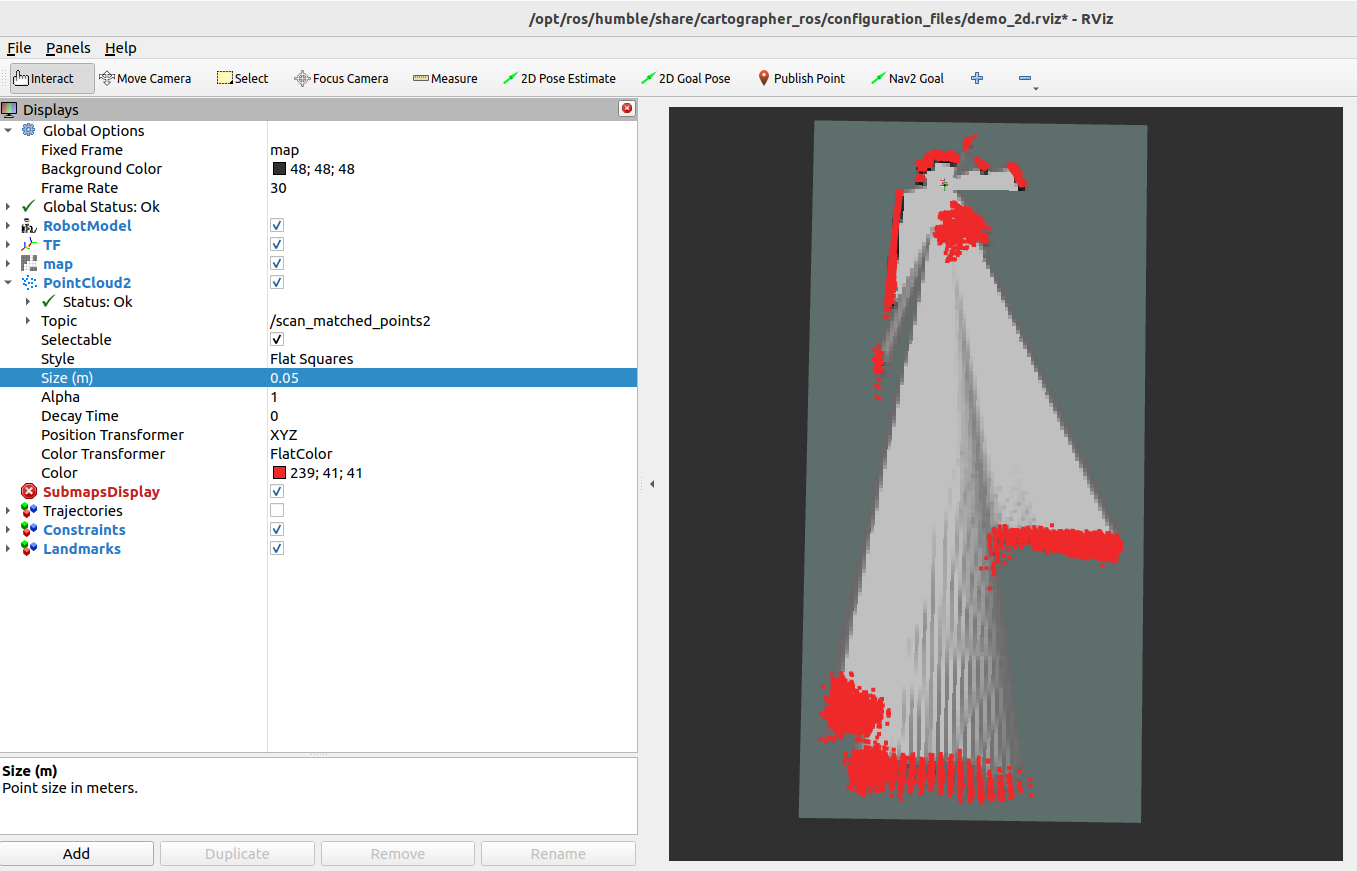
我们修改好上述文件后,即可直接运行
ros2 launch cartographer_ros demo_my_robot_2d.launch.py bag_filename:=/home/bag_filename
#地图的保存
mkdir map
cd map
ros2 run nav2_map_server map_saver_cli -f map
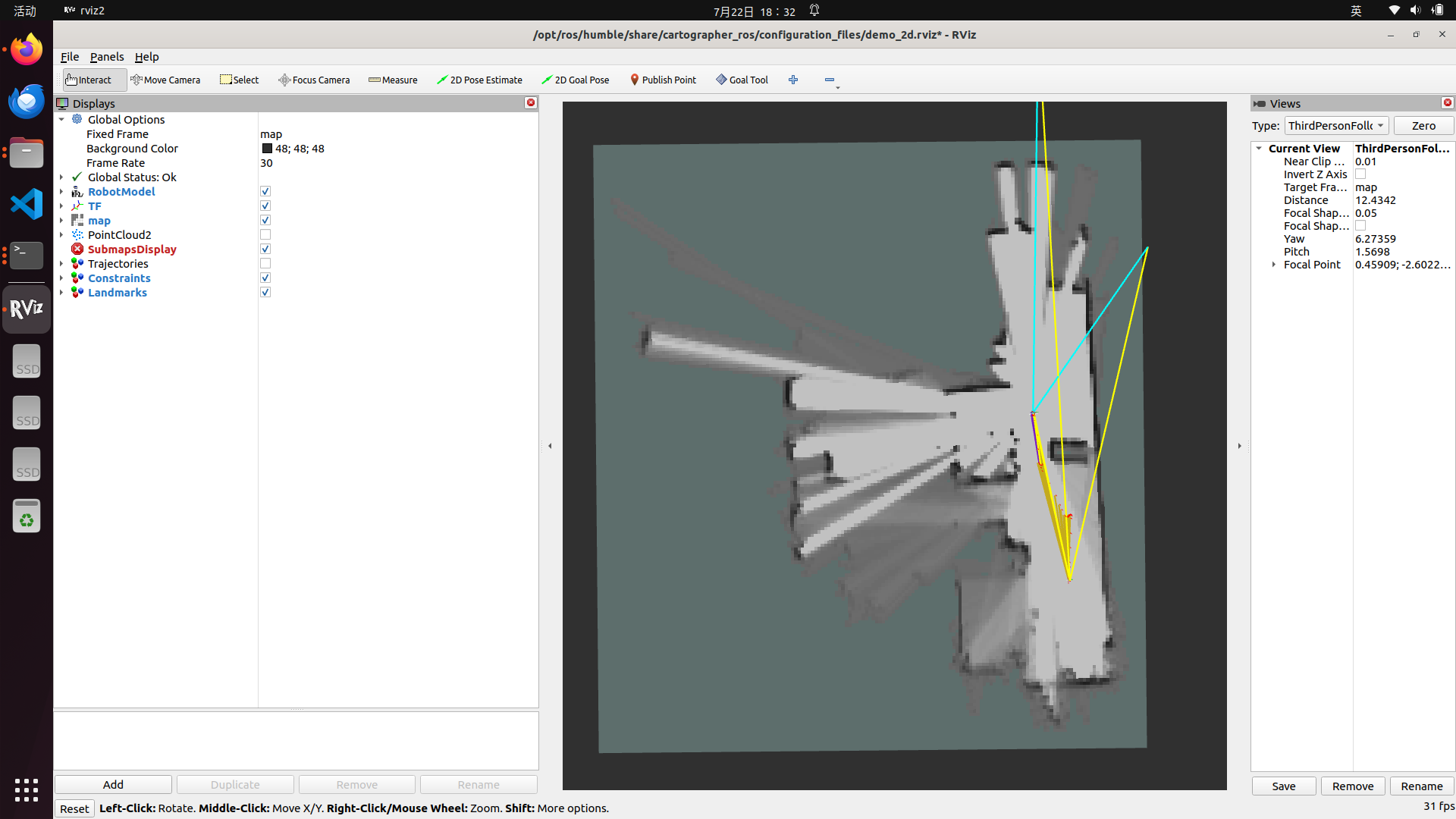
虚拟机建图如下
保存地图需要另一个叫map_saver的节点
在建图完毕之后,我们在我们想要保存地图的地方运行
可以看到已经成功保存下来
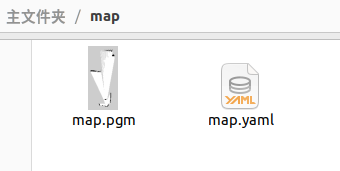
注意:在调用map_saver节点之前不要关闭Cartographer节点,不然会丢失地图
会生成.pgm和.yaml两个文件
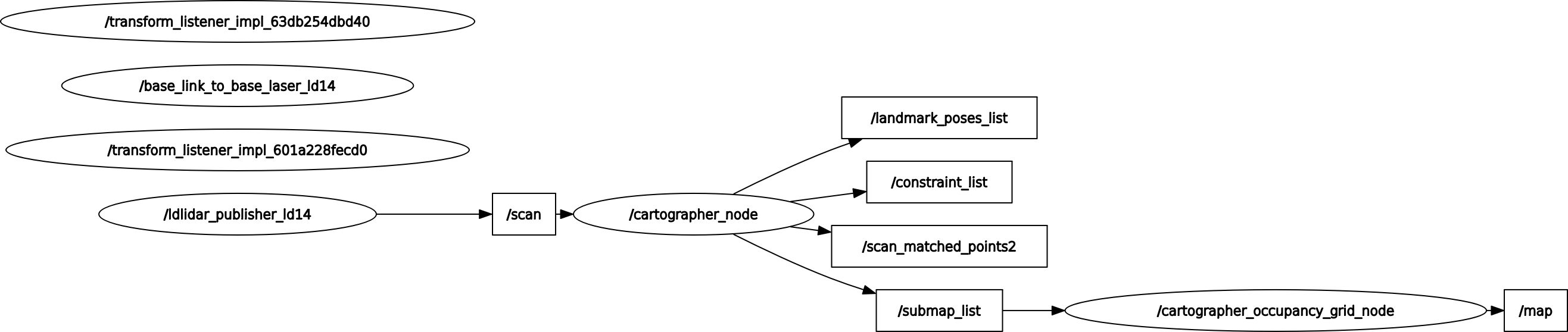
4.5 节点话题图
# 安装并运行rqt
sudo apt update
# 注意,这里需要安装符合自己ros版本的rqt
# 可以使用sudo apt-cache search 包名字 在apt源里寻找库
sudo apt install ros-humble-rqt*
# 运行
rqt_graph
4.6 问题
在虚拟机上使用是建的图会乱飞,直接使用ubuntu系统不会有这个问题
ubuntu系统建图如下
参考资料
https://blog.youkuaiyun.com/weixin_43087302/article/details/131695391
https://blog.youkuaiyun.com/qq_38880380/article/details/131406336
https://blog.youkuaiyun.com/scarecrow_sun/article/details/127978254

















 2206
2206

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}