




 本文档详细介绍了如何在Ubuntu 16.04上安装ROS Kinetic的完整步骤,包括添加源、设置密钥、安装ROS桌面完整版、配置环境变量以及启动ROS Master和相关示例程序。通过roscore、rqt_graph等命令展示了ROS节点和话题的交互。
本文档详细介绍了如何在Ubuntu 16.04上安装ROS Kinetic的完整步骤,包括添加源、设置密钥、安装ROS桌面完整版、配置环境变量以及启动ROS Master和相关示例程序。通过roscore、rqt_graph等命令展示了ROS节点和话题的交互。
官方网站:http://wiki.ros.org/ROS/Installation
本机环境:虚拟机Ubuntu16.04
自己需求:on Ubuntu 16.04 with ROS Kinetic。
1. 添加源
①开启控制台
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
我们的Linux在安装软件的时候,需要通过源列表去寻找对应的一个软件,Ubuntu默认的软件列表是没有ROS的,我们需要把packags.ros.org这样的一个网站给配置到我们的软件仓库列表内才能下载ROS,不然显示的是没有这个软件(因为你的软件列表,也就是源列表没有)。
②设置密钥
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
配置公网密钥,这一步是确保我们的系统认为这个路径是安全的,下载文件是没有问题的。不然下载的东西会立刻被清除掉。
2. 安装
① 我们在加入了新的源之后,需要对源列表进行一次更新,在终端输入sudo apt-get update即可进行更新。
$ sudo apt-get update
②然后我们就可以安装 ROS 啦,但是问题又出现了,ROS kinetic 也有很多版本,这里选择是是安装桌面完整版。
$ sudo apt-get install ros-kinetic-desktop-full
过程耗时。。。。。。
③安装完成后,可以用下面的命令来查看可使用的包
$ apt-cache search ros-kinetic
3. 配置ROS到系统
① 首先呢,需要先初始化 rosdep,rosdep 让你能够轻松地安装被想要编译的 源代码,或被某些 ROS 核心组件需要的系统依赖。 在终端依次输入下面指令。
$ sudo rosdep init
$ rosdep update
此处容易出现错误!!!!
可参考:
1
② 配置环境变量
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
验证
ROS系统的启动需要一个ROS Master,即节点管理器,我们可以在终端输入roscore指令来启动ROS Master。
$ roscore
然后我们来启动一个小海龟的例程。新打开一个终端,输入
$ rosrun turtlesim turtlesim_node
即可出现一个小海龟的画面。
我们再打开一个终端,输入
$ rosrun turtlesim turtle_teleop_key
来启动键盘控制,通 过↑、↓、←、→来控制小乌龟的移动。
我们可以看到,在小海龟的gui头“撞墙”的时候,我们的turtlesim_node节点(咳咳,概念型的请继续关注接下来的内容)会有提示数据的输出。
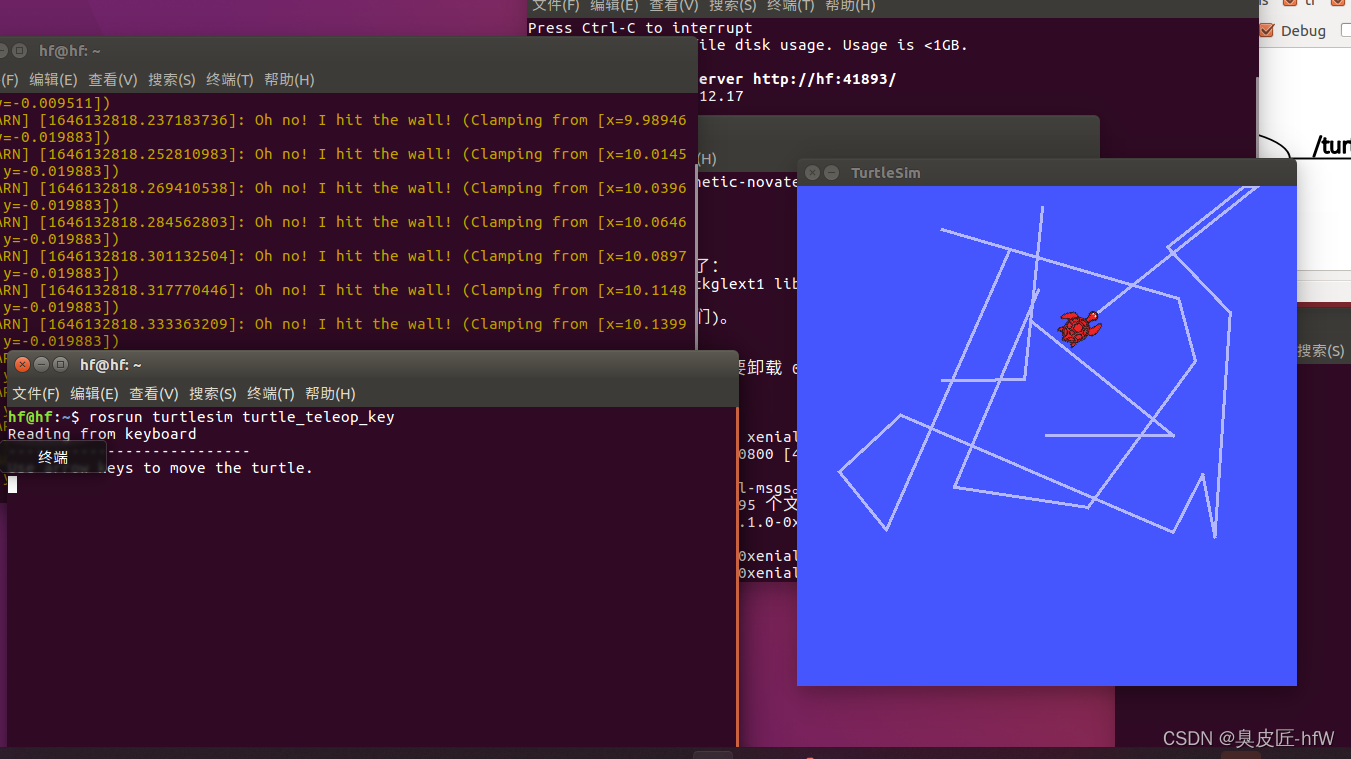
注:注意,要想键盘控制小海龟移动,首先键盘的焦点必须在rosrun turtlesim turtle_teleop_key的终端页面内
我们可以再开启一个终端,查看一下节点关系和话题列表。
$ rqt_graph
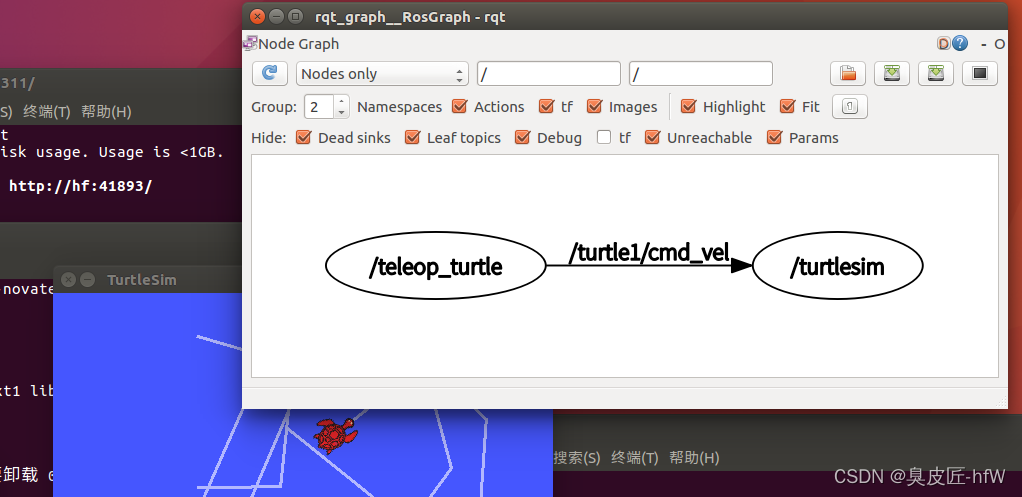
可以看到,是teleop_turtle发送了一个cmd_vel的数据给了turtlesim。



















 1770
1770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











