







在handsfree mini Ubuntu16.04 kinetic 上使用Xtion 深度摄像头遇到的问题如下:
步骤及相关问题排查方案:
1、首先检查设备是否正常挂载上:lsusb
查看是否有 ASUS 这一项,如果是其他牌子的摄像头查看对应的名称即可
正常挂载上之后,进行下一步。没有的话检查接口是否插好
2、打开摄像头节点:roslaunch handsfree_camera xtion.launch
我在这时遇到了问题: Device not found
但是在上一步是正常的,想到的是USB驱动不对应,排查方案如下
1)换一个USB口,重新挂载和启动节点
2)检查相应驱动driver是否安装
我在尝试换了 USB口之后,解决了上面问题。这里解决方案可能很简单,因为handsfree已经把相应驱动什么的都配置好了。如果没有的话需要自己安装相应驱动
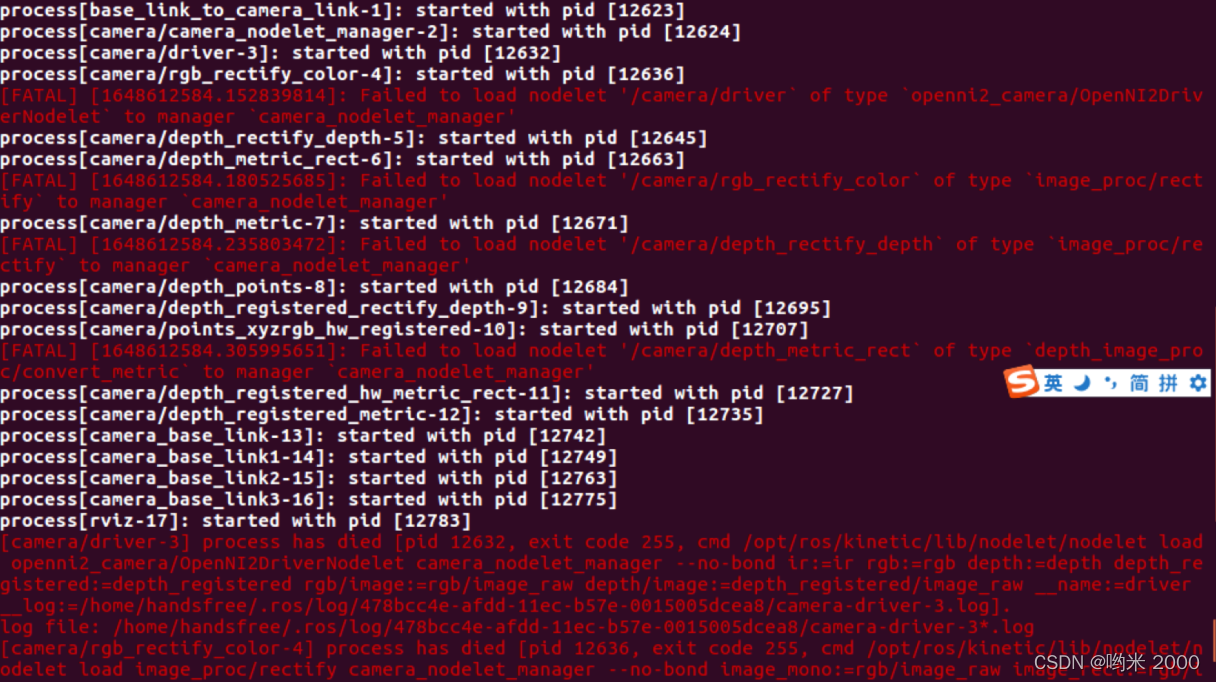
那么同样在这一步时还遇到的问题就是如上图,然后一查发现这个问题很平常,有很多出现。有些node没有正常启动,那么在查看报错过程中我还是想到了driver驱动引出的问题,具体的摄像头驱动安装可以自行搜索。就是想让自己记得之后遇到类似设备问题,要能够想到驱动是否正确安装。
除此之外,在解决问题过程中,留意到了如下图所示的warning,只允许一个摄像头被接入总线bus当中,也就是说在它是只能使用一个摄像头的。并且我看到了有人同时使用kinect和Xtion时出现报错,大概原因为launch文件里的一些冲突。
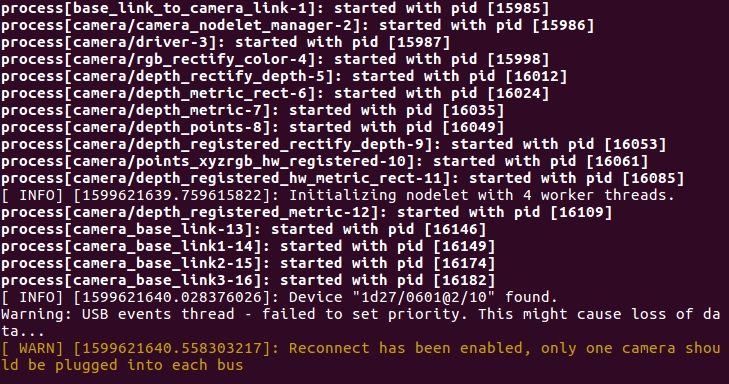
当显示结果如上的时候就说明好了

















 1475
1475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









