







智能机器人实验室——杭州电子科技大学
实现环境:Ubuntu16.04
ORK功能包下载安装
本实验是在Ubuntu16.04下面进行操作的,由于该版本的kinetic并没有集成所有的ORK功能包,所以需要下面几步操作进行源码安装。
1.安装依赖库
sudo apt-get install meshlab
sudo apt-get install libosmesa6-dev
sudo apt-get install python-pyside.qtcore
sudo apt-get install python-pyside.qtgui
2.下载rosinstall文件进行编译
这一步是我琢磨了很久才弄出来的,原来我根据胡春旭教材上的进行下载,弄了好久也没下载下来,但是原文件已经不能下载了,于是又去github重新搜到了,文件链接在这:
https://github.com/wg-perception/object_recognition_core
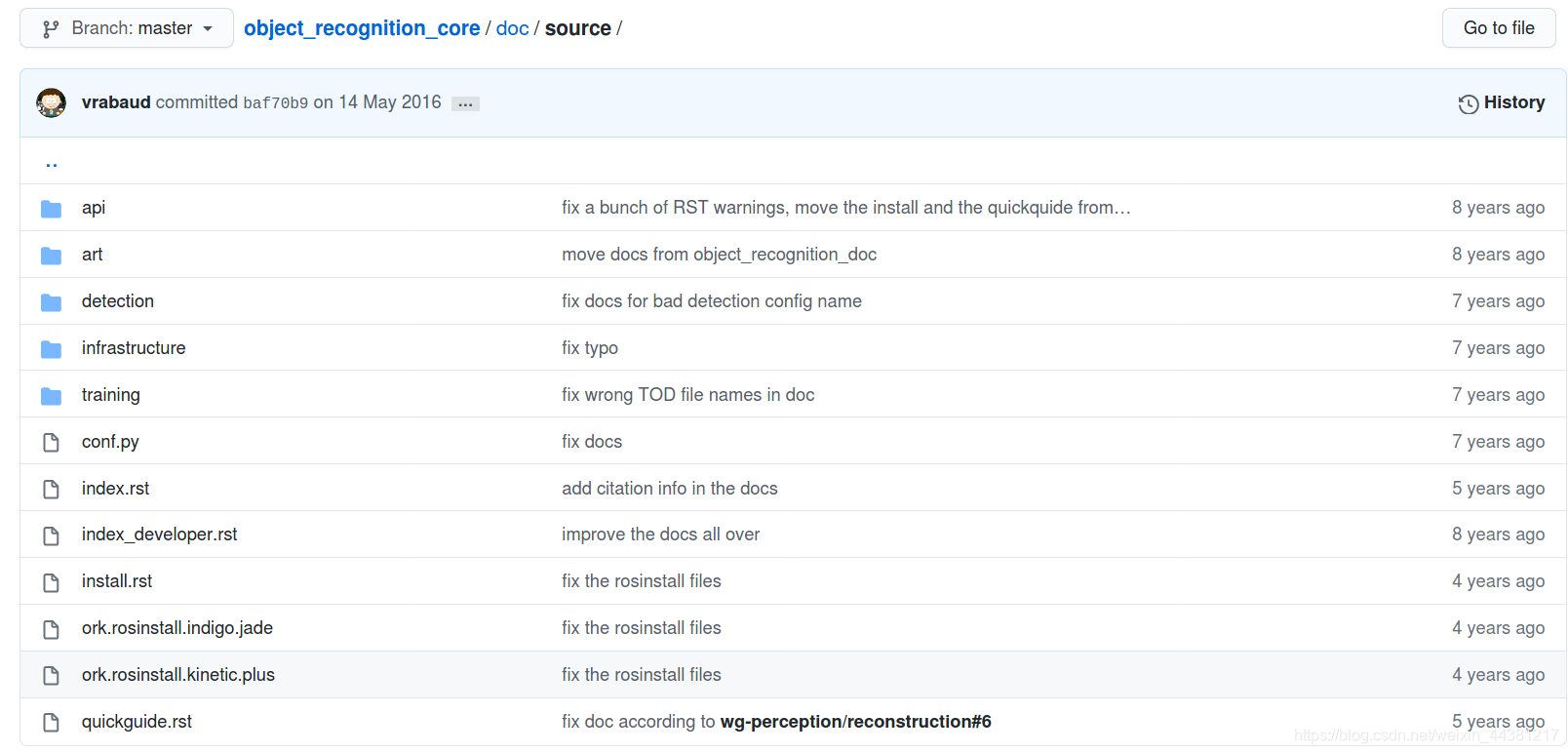 新建一个ork_ws工作空间,我是将ork.rosinstall.kinetic.plus文件直接download到ork_ws下面,然后按如下操作进行:
新建一个ork_ws工作空间,我是将ork.rosinstall.kinetic.plus文件直接download到ork_ws下面,然后按如下操作进行:
cd ork_ws
wstool init src [文件路径]/ork.rosinstall.kinetic.plus
3.下载功能源码
cd src
wstool update -j8
git clone https://github.com/jbohren/xdot.git
cd ..
rosdep install --from-paths src -i -y
4.编译
cd ork_ws
catkin_make
编译需要很久……
然后将环境变量加在.bashrc文件里
物体识别
下面是识别流程:
(1)创建需要识别的物体模型
(2)针对模型进行训练,生成识别模型
(3)使用训练后的识别模型进行物体识别
1.创建数据库
安装CouchDB工具:
sudo apt-get install couchdb
测试安装是否成功:
curl -X GET http://localhost:5984
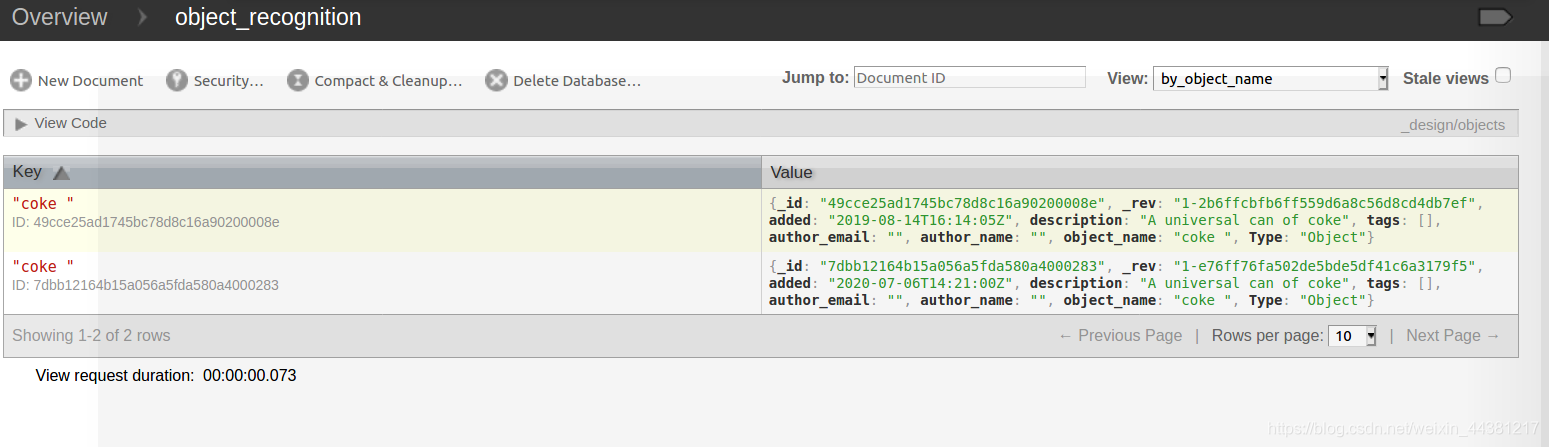
创建一条可乐模型数据:
rosrun object_recognition_core object_add.py -n "coke " -d "A universal can of coke " --commit
可以通过下面的网址在浏览器里查看:
http://localhost:5984/_utils/database.html?object_recognition/_design/objects/_view/by_object_name
2.加载3D模型
下载已有的coke.stl模型,通过github下载:
git clone https://github.com/wg-perception/ork_tutorials
下载到src文件里;
然后把可乐模型加载到数据库里:
rosrun object_recognition_core mesh_add.py 49cce25ad1745bc78d8c16a90200008e [path]/ork_tutorials/data/coke.stl --commit
查看模型:
sudo pip install git+https://github.com/couchapp/couchapp.git
rosrun object_recognition_core push.sh
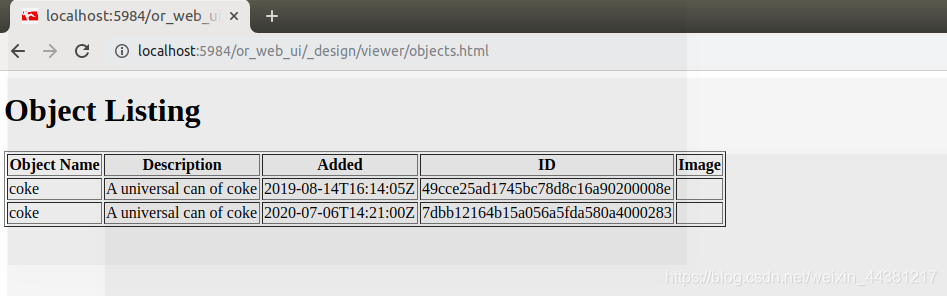
点击object_listing:
 点击meshes:
点击meshes:
 上述就是我们的可乐模型。
上述就是我们的可乐模型。
3.模型训练
在数据库中加载了许多模型,我们需要进行训练生成匹配模板。
命令如下:
sudo object_recognition_core training -c `rospack find object_recognition_linemod`/conf/training.ork
4.三维物体识别
此步骤不太稳定,还需更改

















 5124
5124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









