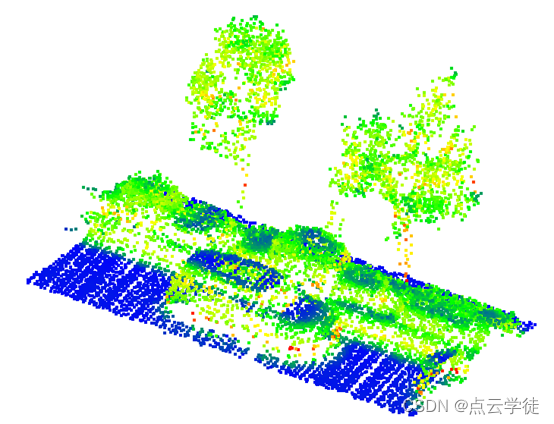
PCL点云处理之基于高程的粗糙度计算(一百) 一、算法介绍 二、具体实现 1.代码 2.结果 一、算法介绍 点云粗糙度是点云的一项重要的局部特征,粗糙度顾名思义,可以理解为点云表面的光滑程度,在点云识别方面,无论是人工设计阈值分割,还是机器学习分类,粗糙度都可以作为重要特征,计算原理很简单,看代码就可以。效果如上图,很明显在道路的粗糙度小于绿化带和树木(这里颜色由蓝到红即表示对应点云的粗糙度由小到大)。 二、具体实现 1.代码 代码如下(示例): #include <iostream> #include <thread>










 本文介绍了PCL点云处理中基于高程的粗糙度计算,该特征在点云识别中起到重要作用,尤其适用于点云分割。通过查看代码和结果,可以理解粗糙度如何反映点云表面的光滑程度。示例代码展示了计算过程,结果显示道路的粗糙度低于绿化带和树木,颜色变化揭示了粗糙度的差异。
本文介绍了PCL点云处理中基于高程的粗糙度计算,该特征在点云识别中起到重要作用,尤其适用于点云分割。通过查看代码和结果,可以理解粗糙度如何反映点云表面的光滑程度。示例代码展示了计算过程,结果显示道路的粗糙度低于绿化带和树木,颜色变化揭示了粗糙度的差异。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1918
1918

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








