




 本文介绍了基本旋转矩阵在惯性导航系统(PSINS)中的应用,包括绕x、y、z轴的逆时针旋转,并详细解析了313(ZXZ)和312(ZXY)转序方法,以及如何通过C矩阵计算姿态角。
本文介绍了基本旋转矩阵在惯性导航系统(PSINS)中的应用,包括绕x、y、z轴的逆时针旋转,并详细解析了313(ZXZ)和312(ZXY)转序方法,以及如何通过C矩阵计算姿态角。
一、习惯约定
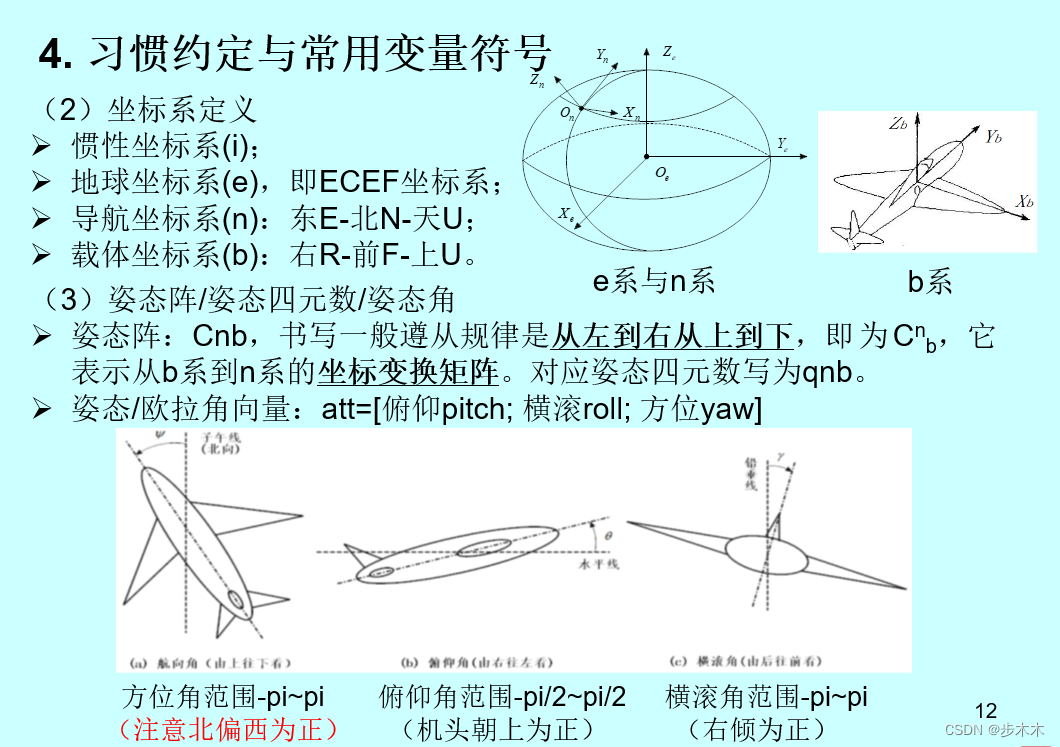
图片来自 PSINS(高精度捷联惯导算法) PSINS工具箱入门与详解.pptx
二、基本旋转矩阵
绕x轴逆时钟旋转
α
\alpha
α角度
R
x
(
α
)
=
[
1
0
0
0
cos
α
sin
α
0
−
sin
α
cos
α
]
R_x(\alpha)=\begin{bmatrix} \ 1 & 0 & 0 \\ 0 & \cos \alpha & \sin \alpha \\ 0 & -\sin \alpha & \cos \alpha\end{bmatrix}
Rx(α)=
1000cosα−sinα0sinαcosα
绕y轴逆时钟旋转
α
\alpha
α角度
R
y
(
α
)
=
[
cos
α
0
−
sin
α
0
1
0
sin
α
0
cos
α
]
R_y(\alpha)=\begin{bmatrix} \ \cos \alpha & 0 & -\sin \alpha \\ 0 & 1 & 0 \\ \sin \alpha & 0 & \cos \alpha\end{bmatrix}
Ry(α)=
cosα0sinα010−sinα0cosα
绕z轴逆时钟旋转
α
\alpha
α角度
R
z
(
α
)
=
[
cos
α
sin
α
0
−
sin
α
cos
α
0
0
0
1
]
R_z(\alpha)=\begin{bmatrix} \cos \alpha & \sin \alpha & 0 \\ -\sin \alpha & \cos \alpha & 0 \\ 0 & 0 & 1 \end{bmatrix}
Rz(α)=
cosα−sinα0sinαcosα0001
三、313转序(ZXZ)

ZXZ转序如图所示,转角依次为: ψ \psi ψ、 θ \theta θ、 ϕ \phi ϕ,即绕 z z z轴转 ψ \psi ψ角,在绕 x ′ x' x′轴转 θ \theta θ角,最后绕 z ′ ′ z'' z′′轴转 ϕ \phi ϕ角。
根据基本旋转矩阵,可得出姿态矩阵
C
=
R
z
(
ϕ
)
R
x
(
θ
)
R
z
(
ψ
)
=
[
cos
ϕ
sin
ϕ
0
−
sin
ϕ
cos
ϕ
0
0
0
1
]
[
1
0
0
0
cos
θ
sin
θ
0
−
sin
θ
cos
θ
]
[
cos
ψ
sin
ψ
0
−
sin
ψ
cos
ψ
0
0
0
1
]
=
[
cos
ϕ
cos
ψ
−
sin
ϕ
cos
θ
sin
ψ
cos
ϕ
sin
ψ
+
sin
ϕ
cos
θ
cos
ψ
sin
ϕ
sin
θ
−
sin
ϕ
cos
ψ
−
cos
ϕ
cos
θ
sin
ψ
−
sin
ϕ
sin
ψ
+
cos
ϕ
cos
θ
cos
ψ
cos
ϕ
sin
θ
sin
θ
sin
ψ
−
sin
θ
cos
ψ
cos
θ
]
\begin{align} C &= R_z(\phi)R_x(\theta)R_z(\psi)\\ &= \begin{bmatrix} \cos \phi & \sin \phi & 0 \\ -\sin \phi & \cos \phi & 0 \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} \ 1 & 0 & 0 \\ 0 & \cos \theta & \sin \theta \\ 0 & -\sin \theta & \cos \theta\end{bmatrix} \begin{bmatrix} \cos \psi & \sin \psi & 0 \\ -\sin \psi & \cos \psi & 0 \\ 0 & 0 & 1 \end{bmatrix}\\ &= \begin{bmatrix} \cos\phi\cos\psi-\sin\phi\cos\theta\sin\psi & \cos\phi\sin\psi+\sin\phi\cos\theta\cos\psi & \sin\phi\sin\theta \\ -\sin\phi\cos\psi-\cos\phi\cos\theta\sin\psi & -\sin\phi\sin\psi+\cos\phi\cos\theta\cos\psi & \cos\phi\sin\theta \\ \sin\theta\sin\psi & -\sin\theta\cos\psi & \cos\theta \end{bmatrix} \end{align}
C=Rz(ϕ)Rx(θ)Rz(ψ)=
cosϕ−sinϕ0sinϕcosϕ0001
1000cosθ−sinθ0sinθcosθ
cosψ−sinψ0sinψcosψ0001
=
cosϕcosψ−sinϕcosθsinψ−sinϕcosψ−cosϕcosθsinψsinθsinψcosϕsinψ+sinϕcosθcosψ−sinϕsinψ+cosϕcosθcosψ−sinθcosψsinϕsinθcosϕsinθcosθ
{
ψ
=
−
arctan
C
z
x
C
z
y
θ
=
arccos
C
z
z
ϕ
=
arctan
C
x
z
C
y
z
\begin{equation} \left\{ \begin{array}{lr} \psi=-\arctan\dfrac{C_{zx}}{C_{zy}} \\ \theta=\arccos{C_{zz}}\\ \phi=\arctan\dfrac{C_{xz}}{C_{yz}} \end{array} \right. \end{equation}
⎩
⎨
⎧ψ=−arctanCzyCzxθ=arccosCzzϕ=arctanCyzCxz
四、312转序(ZXY)

ZXY转序如图所示,转角依次为:
ψ
\psi
ψ、
ϕ
\phi
ϕ、
θ
\theta
θ,即绕
z
z
z轴转
ψ
\psi
ψ角,在绕
x
′
x'
x′轴转
ϕ
\phi
ϕ角,最后绕
y
′
′
y''
y′′轴转
θ
\theta
θ角。
根据基本旋转矩阵,可得出姿态矩阵
C
=
R
y
(
θ
)
R
x
(
ϕ
)
R
z
(
ψ
)
=
[
cos
θ
0
−
sin
θ
0
1
0
sin
θ
0
cos
θ
]
[
1
0
0
0
cos
ϕ
sin
ϕ
0
−
sin
ϕ
cos
ϕ
]
[
cos
ψ
sin
ψ
0
−
sin
ψ
cos
ψ
0
0
0
1
]
=
[
cos
θ
cos
ψ
−
sin
θ
sin
ϕ
sin
ψ
cos
θ
sin
ψ
+
sin
θ
sin
ϕ
cos
ψ
−
sin
θ
cos
ϕ
−
cos
ϕ
sin
ψ
cos
ϕ
cos
ψ
sin
ϕ
sin
θ
cos
ψ
+
cos
θ
sin
ϕ
sin
ψ
sin
θ
sin
ψ
−
cos
θ
sin
ϕ
cos
ψ
cos
θ
cos
ϕ
]
\begin{align} C &= R_y(\theta)R_x(\phi)R_z(\psi)\\ &=\begin{bmatrix} \ \cos \theta & 0 & -\sin \theta \\ 0 & 1 & 0 \\ \sin \theta & 0 & \cos \theta\end{bmatrix}\begin{bmatrix} \ 1 & 0 & 0 \\ 0 & \cos \phi & \sin \phi \\ 0 & -\sin \phi & \cos \phi\end{bmatrix} \begin{bmatrix} \cos \psi & \sin \psi & 0 \\ -\sin \psi & \cos \psi & 0 \\ 0 & 0 & 1 \end{bmatrix}\\ &= \begin{bmatrix} \cos\theta\cos\psi-\sin\theta\sin\phi\sin\psi & \cos\theta\sin\psi+\sin\theta\sin\phi\cos\psi & -\sin\theta\cos\phi \\ -\cos\phi\sin\psi & \cos\phi\cos\psi & \sin\phi \\ \sin\theta\cos\psi+\cos\theta\sin\phi\sin\psi & \sin\theta\sin\psi-\cos\theta\sin\phi\cos\psi & \cos\theta\cos\phi \end{bmatrix} \end{align}
C=Ry(θ)Rx(ϕ)Rz(ψ)=
cosθ0sinθ010−sinθ0cosθ
1000cosϕ−sinϕ0sinϕcosϕ
cosψ−sinψ0sinψcosψ0001
=
cosθcosψ−sinθsinϕsinψ−cosϕsinψsinθcosψ+cosθsinϕsinψcosθsinψ+sinθsinϕcosψcosϕcosψsinθsinψ−cosθsinϕcosψ−sinθcosϕsinϕcosθcosϕ
{
ψ
=
−
arctan
C
y
x
C
y
y
θ
=
arcsin
C
y
z
ϕ
=
−
arctan
C
x
z
C
z
z
\begin{equation} \left\{ \begin{array}{lr} \psi=-\arctan\dfrac{C_{yx}}{C_{yy}} \\ \theta=\arcsin{C_{yz}}\\ \phi=-\arctan\dfrac{C_{xz}}{C_{zz}} \end{array} \right. \end{equation}
⎩
⎨
⎧ψ=−arctanCyyCyxθ=arcsinCyzϕ=−arctanCzzCxz

















 1484
1484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









