






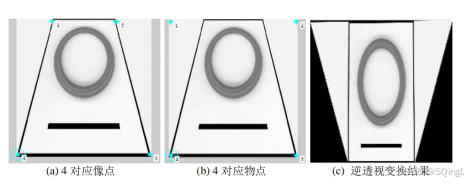
利用逆透视变化算法,将三维的空间(立体)投影成二维的空间(鸟瞰图),以提高测距的准确率。IPM逆透视变换的目标是将透视图像转换为平面视图,消除透视畸变,使得图像中的物体在平面上保持正确的几何形状和相对位置关系。
原理:通过变换矩阵将图像从透视变换的空间转换为正常的平面空间。这个变换过程通常包括确定变换矩阵的参数,如摄像机的内部参数(如焦距、主点等)和外部参数(如相机的位置和方向),然后利用这些参数进行逆变换。
步骤:
-
确定摄像机参数: 首先需要确定摄像机的内部参数(如焦距、主点等)和外部参数(如相机的位置和方向)。这些参数可以通过摄像机标定等技术获取。
-
图像校正: 对于输入的立体图像,需要进行图像校正以消除透视变换导致的畸变。这可以通过校正方法(如鱼眼校正、极坐标转换等)来实现。
-
逆透视变换: 利用逆透视变换算法,将校正后的立体图像投影到二维空间中,生成鸟瞰图或俯视图。逆透视变换的具体实现可以利用透视变换的逆运算来完成,例如利用透视投影的反变换公式。
-
距离测量: 在生成的鸟瞰图中,可以通过图像处理技术(如边缘检测、目标检测等)来识别目标并进行距离测量。通过已知的几何关系和摄像机参数,可以将图像中的像素距离转换为实际距离。


















 3941
3941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











