






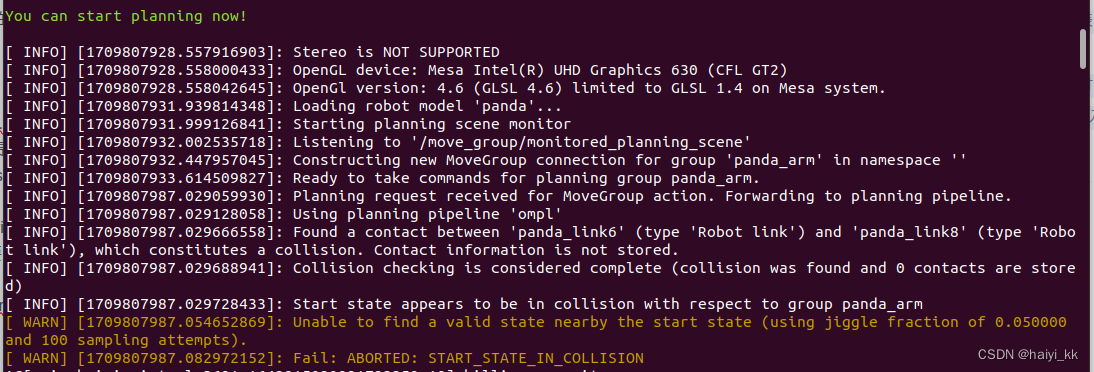
最近在用 Moveit 的 Easy Hand-eye Calibration,但是无法实现 Moveit 控制实际的 Franka,一直报错存在 collision 无法执行。查了一下应该是与官方提供的 panda.urdf.xacro 有关,不想创建自己的 urdf 文件就在官方提供的基础上来解决。
我下载的Ros带有 panda_moveit_config 功能包,猜测它就是基于 panda.urdf.xacro 来创建的,但是它无法用 Moveit Setup Assistant 来修改,也无法保存新的配置,所以还是建议参考官方教程建立自己的 config 包,我的是ubuntu 22.04 官方教程链接: MoveIt Setup Assistant for noetic. panda.urdf.xacro 等文件在 franka_description 包里,没有的需要先下载。
官方教程是基于 panda.urdf.xacro 来创建自己的 config 。查看panda.urdf.xacro文件是可以看到有关于 arm 和 hand 的参数。
cd /franka_description/robots/panda
gedit panda.urdf.xacro
如果你实际控制的是 机械臂和夹爪,可以参考官方教程来做。因为我只需要控制臂没有试过参考教程不加 hand 的情况,不知道会不会也出现 collision 的问题 。但是我在运行 Ros 提供的 panda_moveit_config 时无论 load_gripper:=false 还是 true 的情况都依然存在 collision 的问题,所以估计依然需要在教程的基础上修改 Self-Collisions 里的配置,逻辑上和下面的操作是一样的,需要自己尝试一下。我只控制臂,用的是 franka_description 里的 panda_arm.urdf.xacro 。
!!!总结一下!!!
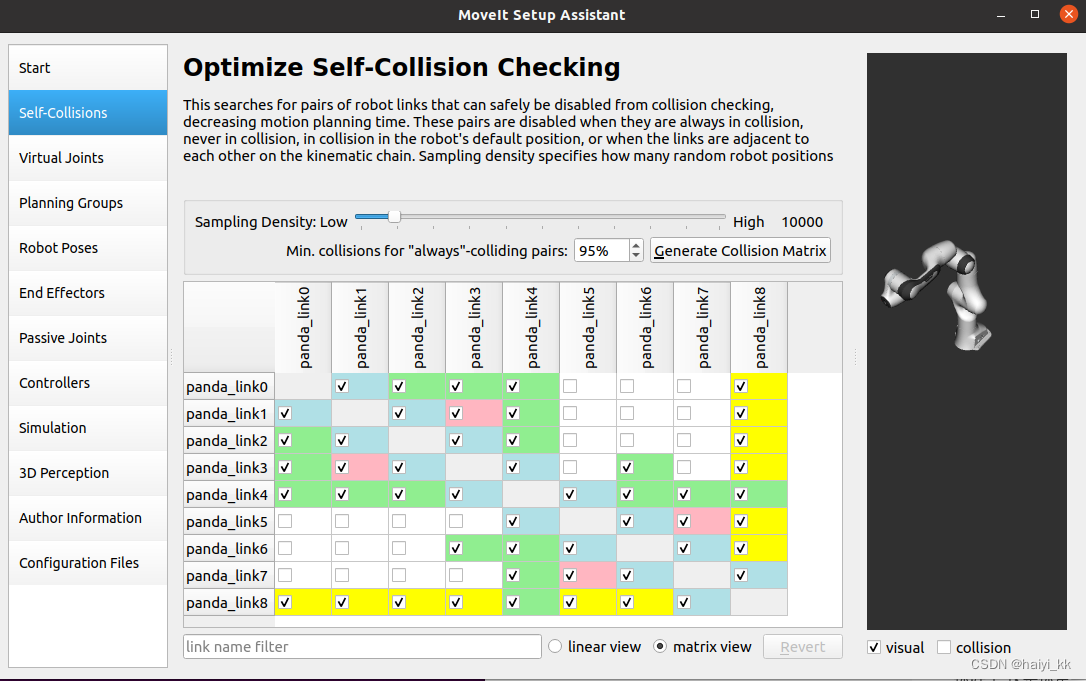
控制 机械臂和夹爪 用 panda.urdf.xacro 来构建新的 config ,Self-Collisions 需要根据实际和报错的情况来更改。
控制 机械臂 用 panda_arm.urdf.xacro 来构建新的 config ,Self-Collisions 在 Generate Collision Matrix 后需要把 panda_link8 与其他关节的 disabled collision 都勾上。
最后会生成自己 Moveit_config 包,把它放在工作空间的 /src 里并编译。我的需要重启电脑后才能搜索到这个包。然后在 moveit_config/launch 里再新建一个 franka_control.launch 文件,添加以下代码,我是从 Ros 的 panda_moveit_config 里复制来的。
<launch>
<arg name="robot_ip" />
<arg name="load_gripper" />
<!-- Launch real-robot control -->
<include file="$(find franka_control)/launch/franka_control.launch" pass_all_args="true" />
<!-- By default use joint position controllers -->
<arg name="transmission" default="position" />
<!-- Start ROS controllers -->
<include file="$(dirname)/ros_controllers.launch" pass_all_args="true" />
<!-- as well as MoveIt demo -->
<include file="$(dirname)/demo.launch" pass_all_args="true">
<!-- robot description is loaded by franka_control.launch -->
<arg name="load_robot_description" value="false" />
<!-- MoveItSimpleControllerManager provides ros_control's JointTrajectory controllers
as well as GripperCommand actions -->
<arg name="moveit_controller_manager" value="simple" />
</include>
</launch>
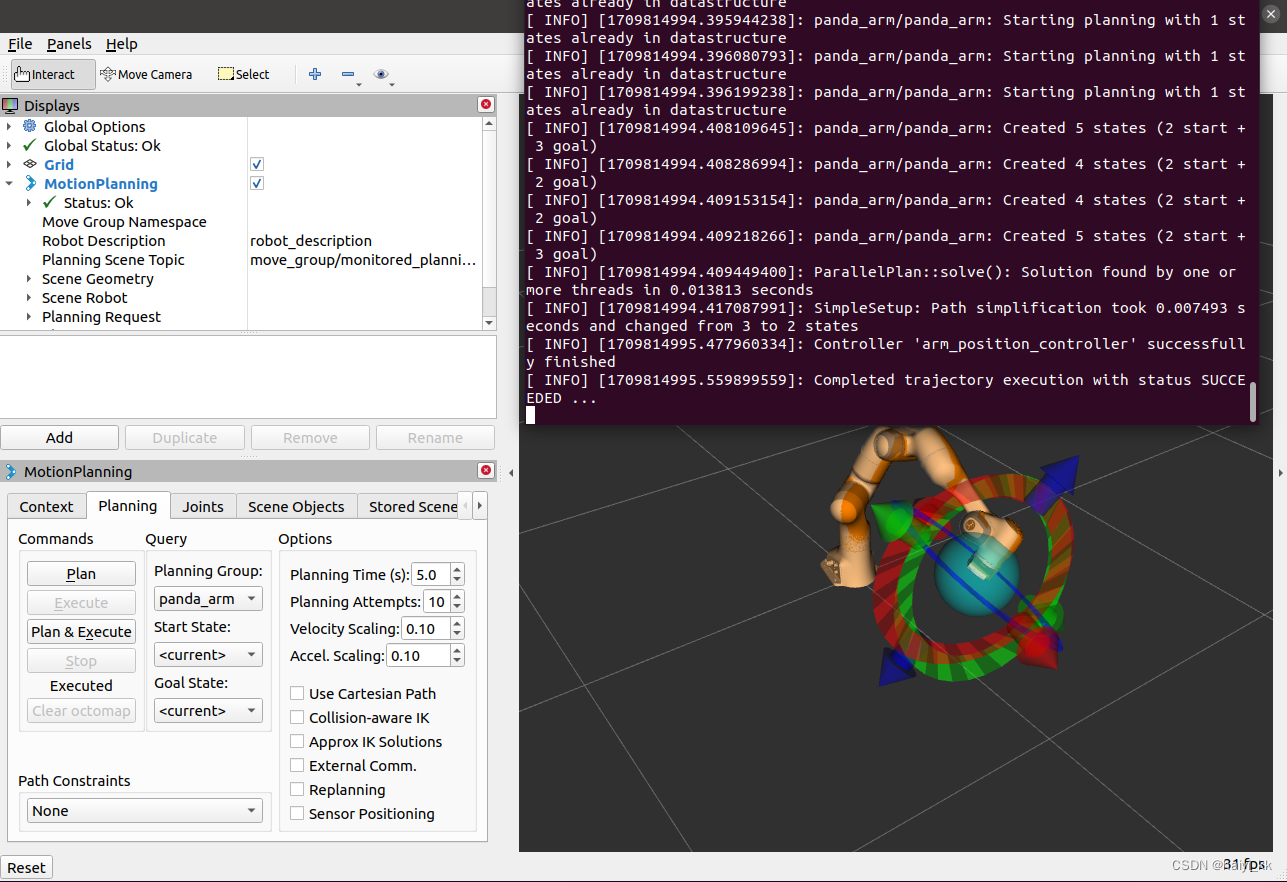
然后就可以开始用 Moveit 控制我们的机械臂了
roslaunch moveit_config franka_control.launch robot_ip:=172.16.1.3 load_gripper:=false

















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









