



3.0 写在前面
第三章核心价值在于搭建 “连续微分几何” 与 “离散 3D 网格” 之间的桥梁—— 它把曲线、曲面的经典微分几何理论(如曲率、第一 / 第二基本型、内蕴几何),落地为可计算的离散形式(如离散拉普拉斯算子、离散曲率),是 3D 网格处理领域的 “理论基础 + 工程工具集”。
3.1 曲线
3.1.1 弧长
计算弧长就是计算函数的积分
s=s(u)=∫au∥x′(t)∥dt.(3.1)s = s(u) = \int_{a}^{u} \|{x}'(t)\| dt. \tag{3.1}s=s(u)=∫au∥x′(t)∥dt.(3.1)
3.1.2 曲率
假设一条正则曲线是按弧长参数化的,那么我们可以将点 x(s)处的曲率定义为
κ(s):=∥x′′(s)∥
\kappa(s) := \|x''(s)\|
κ(s):=∥x′′(s)∥
对于任意一条具有参数化 u 的正则曲线,我们可以利用根据弧长 ( s(u) ) 进行的重新参数化来定义曲率。
直观地说,曲率用于衡量曲线偏离直线的程度。
换句话说,曲率将曲线切向量的导数与曲线法向量联系起来,并且还可以通过关系式 来定义。
x′′(s)=κ(s)n⃗(s)
{x}''(s) = \kappa(s)\vec{n}(s)
x′′(s)=κ(s)n(s)
需要注意的是,在这个定义中,曲率是有符号的,因此当法向量的方向反转时,曲率的符号也会改变。
不难看出,直线的曲率为零,而任何处处曲率为零的曲线必定是线段。具有恒定曲率的平面曲线是圆弧。曲率也可以定义为密切圆半径的倒数。密切圆在曲线的点 ( x(u) ) 处对曲线进行局部最佳逼近,其构造方法如下:设 ( c(u_{-}, u, u_{+}) ) 是经过三个曲线上的点 ( x(u_{-}) )、( x(u) ) 和 ( x(u_{+}) )(其中 ( u_{-} < u < u_{+} ))的圆。那么,在点 ( x(u) ) 处的密切圆 ( c(u) ) 定义为
c=limu−,u+→uc(u−,u,u+)c = \lim\limits_{u_{-}, u_{+} \to u} c(u_{-}, u, u_{+})c=u−,u+→ulimc(u−,u,u+)
密切圆的半径为 (1/κ(u))(1/\kappa(u) )(1/κ(u)),并且在点 x(u) 处与曲线相切。
3.2 面
长度和曲率是曲线的欧几里得不变量,即它们在刚体运动下保持不变。现在我们将研究嵌入在R3\mathbb{R}^3R3中的光滑曲面的类似度量和曲率性质 。这些特性通过参数化表面表示法更易定义,下文将对此进行说明。随后,将从该参数化表示法中推导出度量特性。这些微分特性的三角网格离散化方法将在3.3节中阐述。
3.2.1 曲面的参数
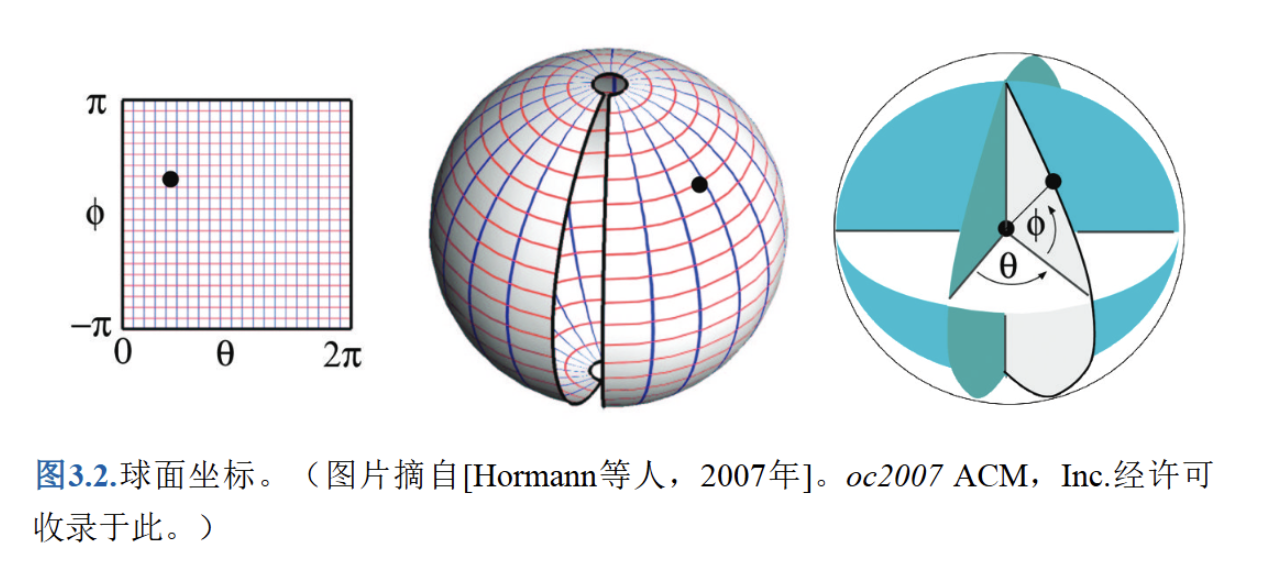
- 完整参数化球体方程:
三维空间中的 (x, y, z) 坐标和球坐标参数 (θ, φ) 的映射方程(参数化球体方程)为:
x(θ,ϕ)=(x(θ,ϕ)y(θ,ϕ)z(θ,ϕ))=(RcosθcosϕRsinθcosϕRsinϕ) x(\theta, \phi)=\left(\begin{array}{c}x(\theta, \phi) \\ y(\theta, \phi) \\ z(\theta, \phi)\end{array}\right)=\left(\begin{array}{c}R \cos \theta \cos \phi \\ R \sin \theta \cos \phi \\ R \sin \phi\end{array}\right) x(θ,ϕ)=x(θ,ϕ)y(θ,ϕ)z(θ,ϕ)=RcosθcosϕRsinθcosϕRsinϕ
其中:
- θ ∈ [0, 2π],为方位角(绕 z 轴旋转的角度);
- φ ∈ [-π/2, π/2],为极角(与 z 轴的夹角);
- R 为球体的半径。

















 149
149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









