



2.0
重点掌握半边数据结构
选择网格数据结构的时候一般考虑下面两个因素:
两个因素
1.拓扑需求(Topological Requirements) :需要表示什么样的网格?是二维流形,还是其它更复杂的网格?是单纯的三角形网格,或者其它任意的多边形网格?是需要给当前的网格附加上其它的网格?
使用三角形网格是因为,三个点就可以构成一个面,也就是三点共面。
2.算法需求(Algorithmic Requirements):使用什么样的算法?是简单的渲染还是需要频繁的访问相邻的点边面?是静态网格还是动态网格?对于网格是否需要附加一些其它的属性?对内存的消耗是否特别在意?
评估一个数据结构的好坏有下面几个标准:
1.建立数据结构所需要预处理的时间
2.查询操作的响应时间
3.执行某项具体操作的时间
4.内存消耗和冗余
以下为四种数据结构
Faced-Based Data Structures (面基本数据结构)
这种数据结构最直观的优点是简单,这种数据结构由网格所有面的集合构成,而对于每一个面则使用组成面多边形的的点来表示。
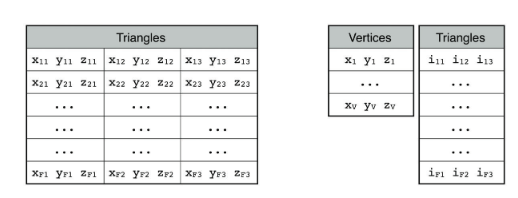
以三角形网格为例,假设使用32位的单精度浮点数来表示坐标则,那么使用顶点的数据来表示一个三角形则需要36个字节
(3 vertex * 3 dimension * 4 byte = 36 byte)。
3个顶点,每个点x,y,z三个坐标,每个坐标4个字节(32位单精度浮点数)
通过上一部分的学习的公理可知 任一顶点的邻边的平均数量为6,
即在这种数据结构中一个顶点平均会被存储6次,所以可以估算使用这种数据结构平均每一个顶点要使用72个字节(3 dimension * 4 byte * 6 time = 72 byte)
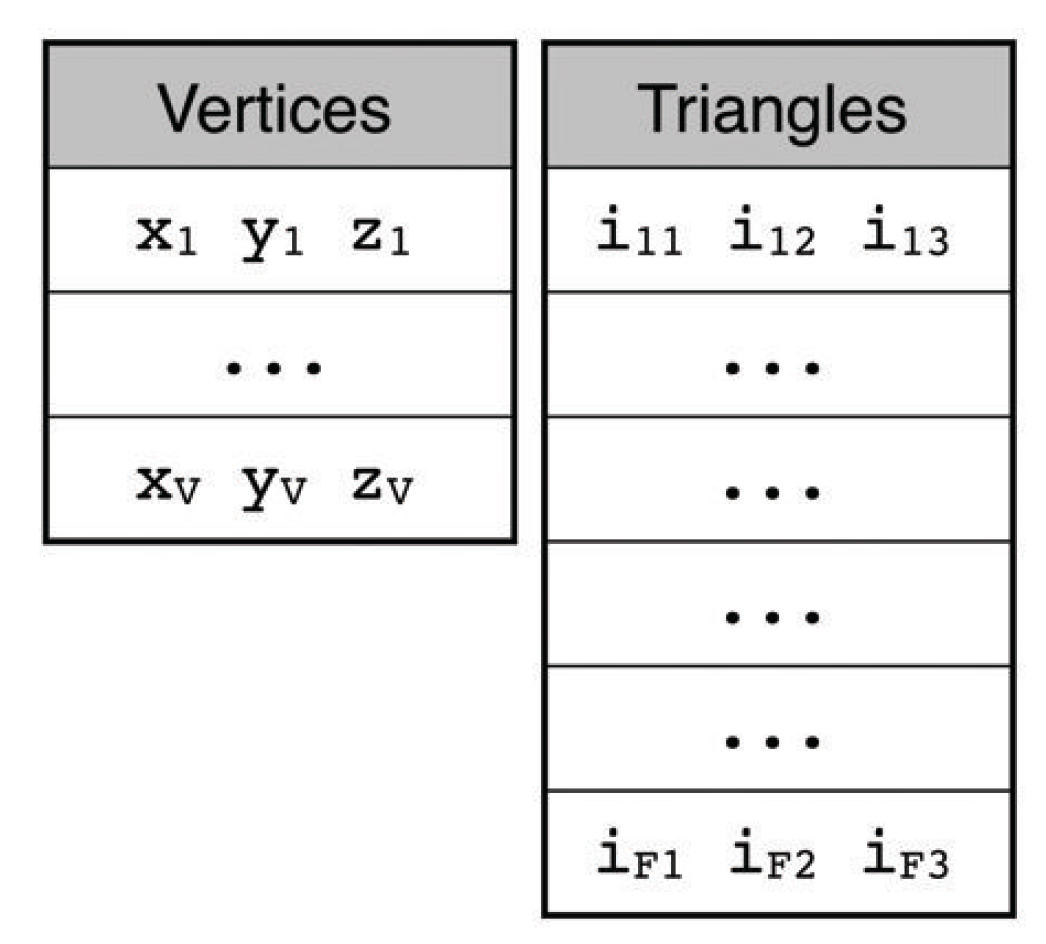
可以发现,一个顶点的数据被多次存储,一种可以改进这种空间冗余的方法是,使用数组来存储所有的顶点数据,而对于每一个三角形面只需要存储组成其的三个顶点的索引号即可。
即由两部分组成
要将给定的表格分成两个行数不一样的表格,可以按照以下步骤操作。假设需要将顶点数据和三角形数据分开:
OFF OBJ VRML使用这种格式
这种数据结构的缺陷是:它缺少显式的连通性信息
Edge-Based Data Structures (基于边的数据结构)
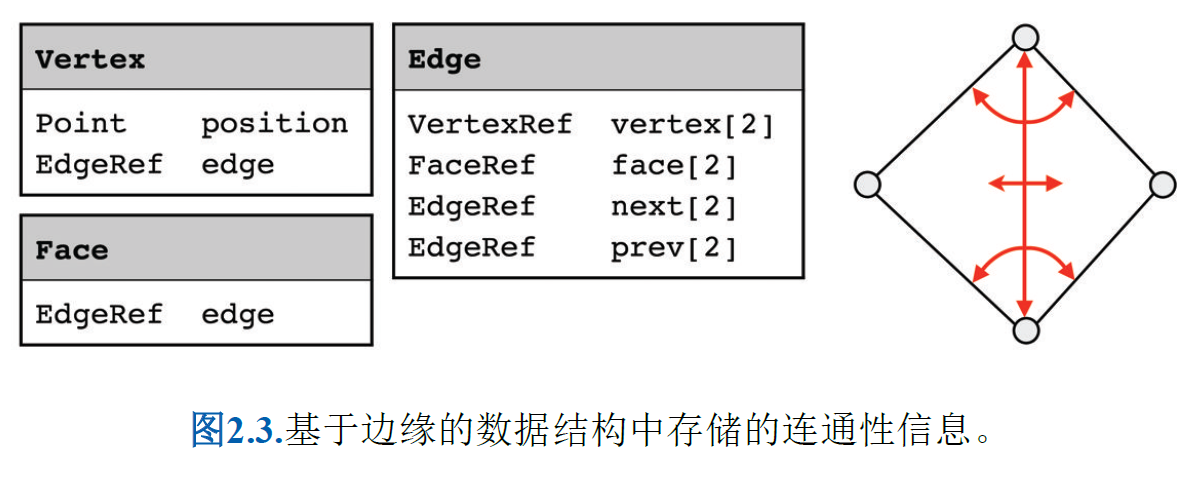
虽然基于边的数据结构能够表示任意多边形网格,但在遍历单环时仍
需区分情况(中心顶点是边的第一个顶点还是第二个顶点?)。这一问题
最终由半边数据结构解决。
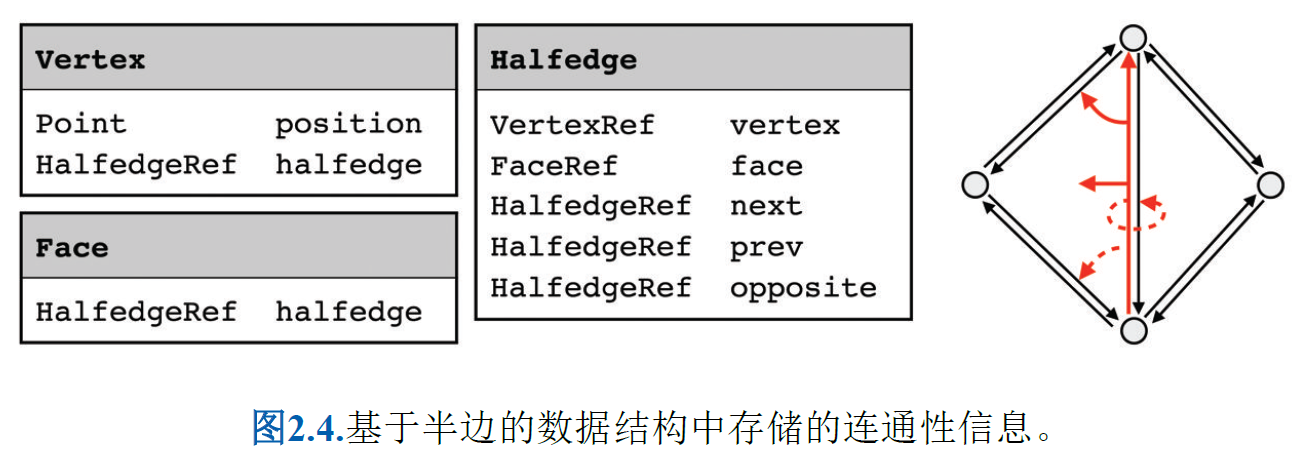
Halfedge-Based Data Structure (半边结构)
半边数据结构通过将每条无向边拆分为两条有向半边,
在半边数据结构中,半边沿每个面和边界始终按逆时针方向排列。因
此,每个边界可视为具有潜在高度的空面。由此,每条半边对应一个独特
的顶点(即面内非共享顶点),从而可按顶点存储纹理坐标或法线等属
性。
注意 Ponit,HaledegRef,VertexRef ,FaceRef是类名
#include <vector>
#include <cstdint>
#include <glm/glm.hpp> // 用于存储顶点位置(可替换为自定义vec3)
// 前置声明(解决类之间的循环引用)
struct Halfedge;
struct Vertex;
struct Face;
// 半边类(核心数据结构)
struct Halfedge {
uint32_t vertex_idx; // 指向的顶点索引(关联Vertex数组)
uint32_t face_idx; // 相邻的面索引(关联Face数组,边界半边设为UINT32_MAX表示空)
uint32_t next_idx; // 下一条半边索引(关联Halfedge数组)
uint32_t prev_idx; // 前一条半边索引(关联Halfedge数组)
uint32_t opposite_idx;// 对向半边索引(关联Halfedge数组)
// 构造函数(默认初始化)
Halfedge() : vertex_idx(UINT32_MAX), face_idx(UINT32_MAX),
next_idx(UINT32_MAX), prev_idx(UINT32_MAX),
opposite_idx(UINT32_MAX) {}
};
// 顶点类
struct Vertex {
glm::vec3 position; // 顶点3D位置
uint32_t outgoing_halfedge;// 从该顶点出发的任意一条半边索引(用于遍历邻域)
Vertex(const glm::vec3& pos = glm::vec3(0.0f))
: position(pos), outgoing_halfedge(UINT32_MAX) {}
};
// 面类
struct Face {
uint32_t first_halfedge; // 面的第一条半边索引(用于遍历面的所有半边)
Face() : first_halfedge(UINT32_MAX) {}
};
// 网格类(管理所有元素的容器)
class PolygonMesh {
public:
std::vector<Vertex> vertices; // 顶点数组
std::vector<Face> faces; // 面数组
std::vector<Halfedge> halfedges;// 半边数组
// 初始化示例:构建1个四边形面 + 边界的半边结构
void initExampleMesh() {
// 1. 初始化顶点(V0-V3,假设四边形顶点位置)
vertices.emplace_back(glm::vec3(0.0f, 0.0f, 0.0f));// V0
vertices.emplace_back(glm::vec3(1.0f, 0.0f, 0.0f));// V1
vertices.emplace_back(glm::vec3(1.0f, 1.0f, 0.0f));// V2
vertices.emplace_back(glm::vec3(0.0f, 1.0f, 0.0f));// V3
// 2. 初始化面(1个内部面F0)
faces.emplace_back();
faces[0].first_halfedge = 0; // F0的第一条半边是H0
// 3. 初始化半边(H0-H7,对应之前的拓扑关系)
halfedges.resize(8);
// 内部半边 H0-H3(关联F0)
halfedges[0] = {1, 0, 1, 3, 4};// H0: V1, F0, next=H1, prev=H3, opposite=H4
halfedges[1] = {2, 0, 2, 0, 5};// H1: V2, F0, next=H2, prev=H0, opposite=H5
halfedges[2] = {3, 0, 3, 1, 6};// H2: V3, F0, next=H3, prev=H1, opposite=H6
halfedges[3] = {0, 0, 0, 2, 7};// H3: V0, F0, next=H0, prev=H2, opposite=H7
// 边界半边 H4-H7(无关联面,face_idx=UINT32_MAX)
halfedges[4] = {0, UINT32_MAX, 5, 7, 0};// H4: V0, 空面, next=H5, prev=H7, opposite=H0
halfedges[5] = {3, UINT32_MAX, 6, 4, 1};// H5: V3, 空面, next=H6, prev=H4, opposite=H1
halfedges[6] = {2, UINT32_MAX, 7, 5, 2};// H6: V2, 空面, next=H7, prev=H5, opposite=H2
halfedges[7] = {1, UINT32_MAX, 4, 6, 3};// H7: V1, 空面, next=H4, prev=H6, opposite=H3
// 4. 初始化顶点的出边半边(用于快速遍历)
vertices[0].outgoing_halfedge = 4; // V0的出边是H4(V0→V3)
vertices[1].outgoing_halfedge = 0; // V1的出边是H0(V1→V2)
vertices[2].outgoing_halfedge = 1; // V2的出边是H1(V2→V3)
vertices[3].outgoing_halfedge = 2; // V3的出边是H2(V3→V0)
}
// 辅助函数:判断半边是否为边界半边
bool isBoundaryHalfedge(uint32_t he_idx) const {
return halfedges[he_idx].face_idx == UINT32_MAX;
}
};
// 使用示例
int main() {
PolygonMesh mesh;
mesh.initExampleMesh();
// 验证H0的对向半边是否为H4
Halfedge h0 = mesh.halfedges[0];
Halfedge h4 = mesh.halfedges[h0.opposite_idx];
printf("H0的对向半边指向顶点索引:%u(预期0)\n", h4.vertex_idx);
printf("H4是否为边界半边:%s(预期true)\n", mesh.isBoundaryHalfedge(4) ? "true" : "false");
return 0;
}
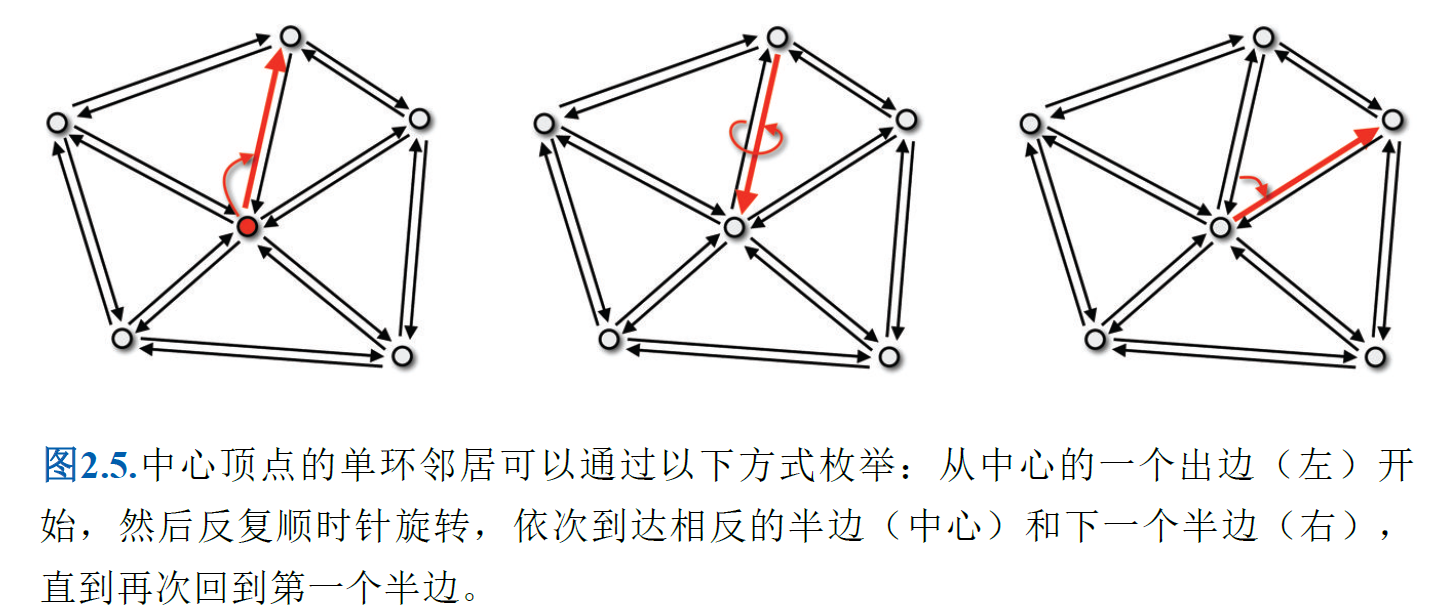
半边数据结构使我们能够枚举每个元素(即顶点、边、半边或面)的所有相邻元素。特别是,现在可以枚举给定顶点的一环邻域,而无需区分大小写
// 功能:枚举中心顶点的所有一环邻域顶点,并对每个邻域顶点执行自定义处理函数
// 参数:center - 中心顶点的引用;func - 处理邻域顶点的自定义函数(输入为顶点引用)
void enumerate_one_ring(VertexRef center, Function func) {
// 1. 获取中心顶点的出半边(半边结构中,每个顶点关联一个"出"方向的半边作为遍历起点)
HalfedgeRef h = outgoing_halfedge(center);
// 2. 记录遍历终止标记(回到起始半边时停止循环)
HalfedgeRef hstop = h;
// 3. 循环遍历所有一环邻域(do-while确保至少执行一次,适配单邻边场景)
do {
// 4. 获取当前半边的目标顶点(即中心顶点的一个邻域顶点)
VertexRef neighbor_vertex = vertex(h);
// 5. 对邻域顶点执行自定义逻辑
func(neighbor_vertex);
// 6. 迭代到下一个邻域对应的出半边:
// - opposite_halfedge(h):取当前半边的对边(邻域顶点的入半边)
// - next_halfedge(...):取对边的下一条边(回到中心顶点的下一个出半边)
h = next_halfedge(opposite_halfedge(h));
} while (h != hstop); // 7. 回到起始半边,遍历完成,终止循环
}
Directed-Edge Data Structure(有向边数据结构)
这种数据结构是Halfedge-Based Data Structure(半边数据结构)的一种特殊形式,该数据结构只能单纯的表示某种类型的网格,例如三角形网格或者四边形网格,而不能表示混合了三角形和四边形的网格。这种数据结构将连通性信息隐藏在了数组索引号的关系中。
是内存优化形的半边数据结构
2.5 总结
精心设计的数据结构是基于多边形网格的几何处理算法的核心。对于本书中介绍的大多数算法,推荐使用半边数据结构,或作为三角网格特例的有向边数据结构。

















 1101
1101

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









