







7、RTOS新增方案
此处以在t113_s3p_c906 芯片下创建一个example_demo方案为例,帮助客户快速创建定制方案。
第一步:进入rtos/board/t113_s3p_c906目录,创建 example_demo 文件夹(从evb1_auto方案拷贝过来)

第二步:进入rtos/lichee/rtos/projects/t113_s3p_c906目录,创建example_demo文件夹(从evb1_auto方案拷贝过来)

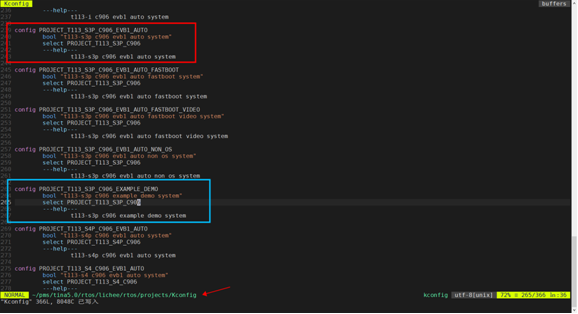
第三步:修改rtos/lichee/rtos/projects/Kconfig,新增example_demo配置项(从evb1_auto配置项拷贝过来)
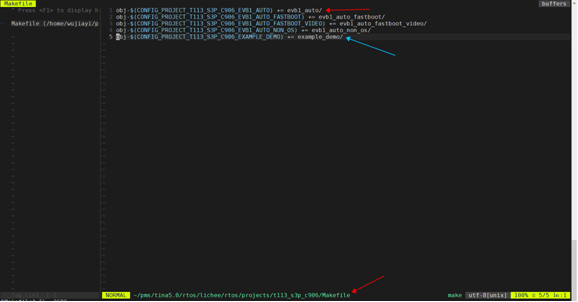
第四步:修改rtos/lichee/rtos/projects/t113_s3p_c906/Makefile,关联了example_demo方案编译
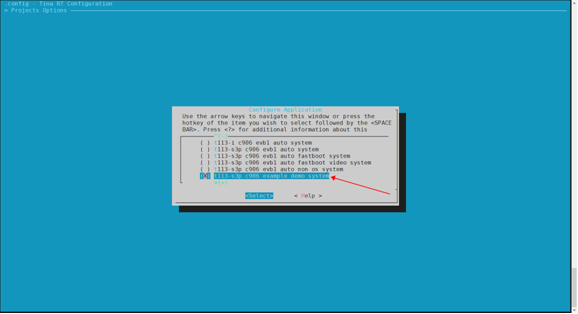
第五步:进入rtos目录,重新配置方案选择,这时候我们发现会多了t113_s3p_c906_example_demo 方案选择,我们重新选择t113_s3p_c906_example_demo 方案
source envsetup.sh
lunch_rtos
You're building on Linux
Lunch menu... pick a combo:
1. t113_i_c906_evb1_auto
2. t113_s3p_c906_evb1_auto
3. t113_s3p_c906_evb1_auto_fastboot
4. t113_s3p_c906_evb1_auto_fastboot_video
5. t113_s3p_c906_evb1_auto_non_os
6. t113_s3p_c906_example_demo
7. t113_s4_c906_evb1_auto
8. t113_s4_c906_evb1_auto_fastboot_video
9. t113_s4p_c906_evb1_auto
Which would you like? [Default t113_s3p_c906_example_demo]:
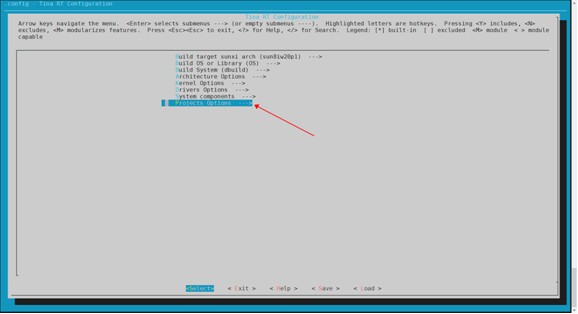
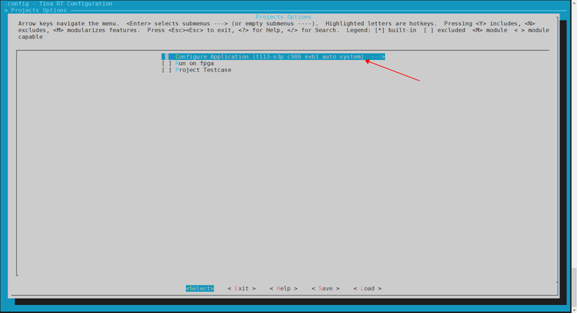
第六步:打开配置defconfig文件,选择正确方案配置项
mrtos_menuconfig
第七步:重新编译
mrtos clean
mrtos

















 1293
1293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









