









文章目录
前言
系列文章将更新直流有刷电机的工作原理、仿真控制以及应用STM32开发板及驱动板完成对直流有刷电机的实际控制。
一、直流有刷电机简介
直流有刷电机(Brushed DC Motor,BDC):是一种内含电刷装置,可以将直流电能转换为机械能的发动机。
直流有刷电机由定子、转子、电刷以及换向器组成,如下图所示:
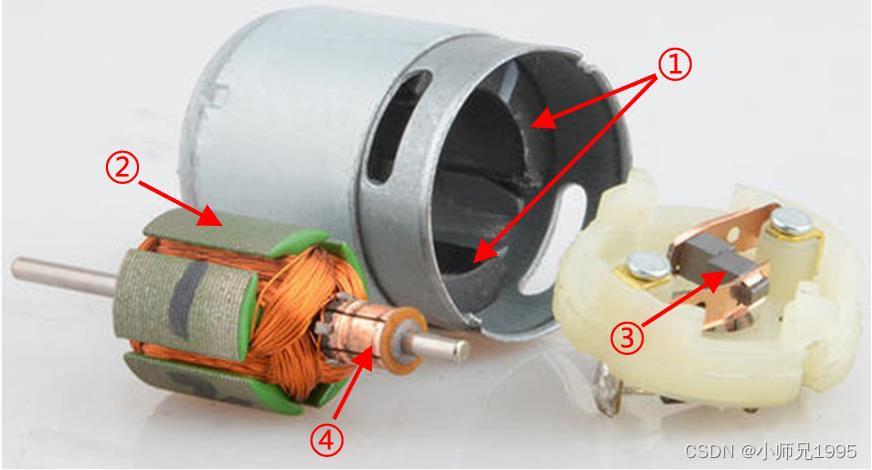
1、定子:产生恒定的磁场
2、转子:通电后受力可以在磁场中运动
3、电刷:将外部电流输入到转子绕组上
4、换向器:改变转子绕组上的电流流向,是电机可以持续转动的关键部件
二、直流有刷电机的工作原理
直流有刷电机的本质工作原理为:通电导体在磁场中的受力运动。由“左手定则”可判断通电导体在磁场中的受力方向。
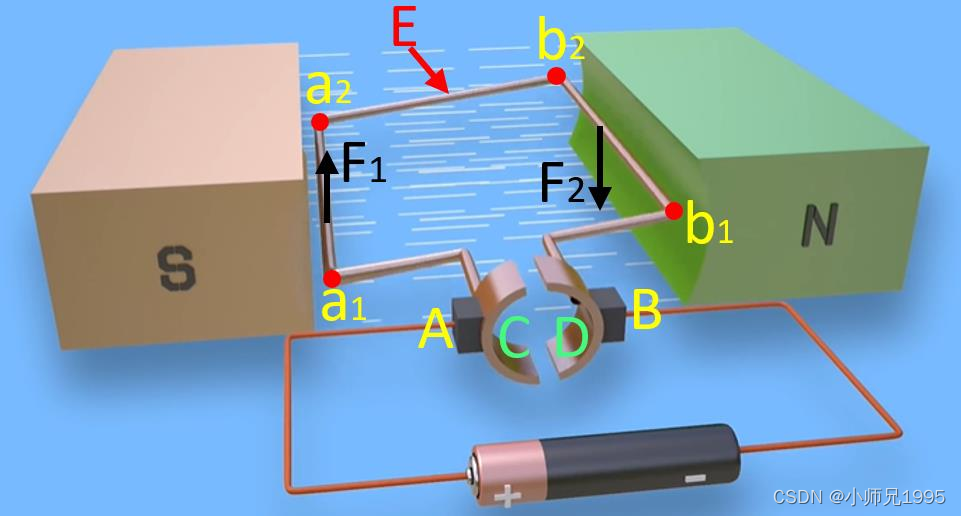
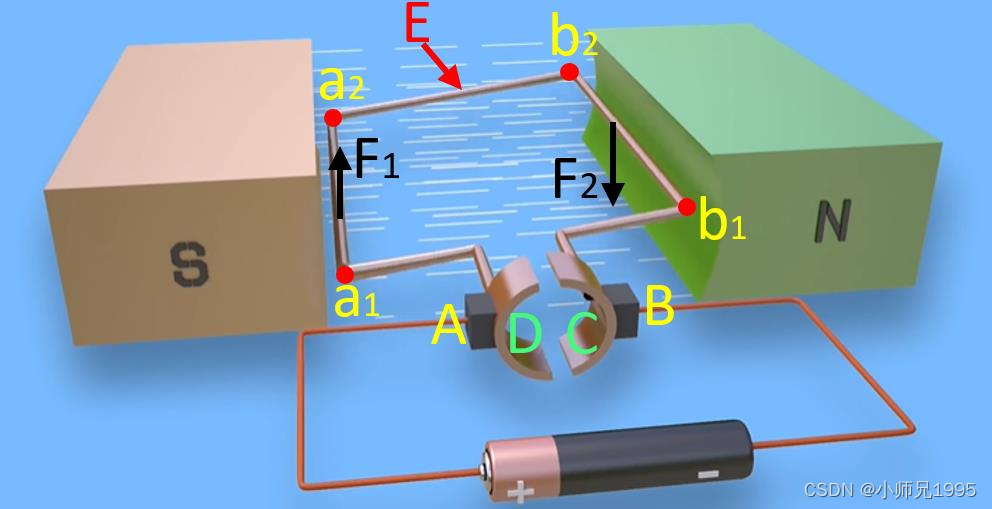
如上图所示:C、D两个半圆周的铜片构成换向器,两个弹性铜片A、B靠在换向器两侧为电刷,电源通过电刷向内部线框供电。内部线框两侧有一对磁极N/S,磁力线由N到S,当内部线框有电流流过,两侧导线就会受到磁场力的作用,由“左手定则”可判断,左侧导线受到的磁场力F1和右侧导线受到的磁场力F2方向相反,线框在磁场力的作用下开始转动,电流的流向为:A->C->a1->a2->b2->b1->D->B。当转过90度时,换向器改变了内部电枢电流的方向,使线框左右两侧导线产生的磁场力方向不变,电机可以一直旋转下去,此时的电流方向为:A->D->a1->a2->b2->b1->C-B,如下图所示。
三、直流有刷电机的驱动及仿真
直流有刷电机的驱动很简单,在允许的电压范围内,给直流电机提供稳定的直流电源,即可驱动直流电机的转动。
3.1、Matlab/Simulink仿真
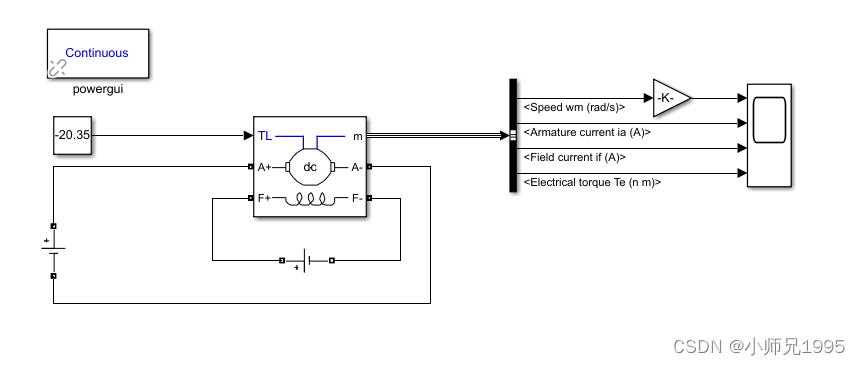
在Matlab/Simulink中搭建仿真模型如下:
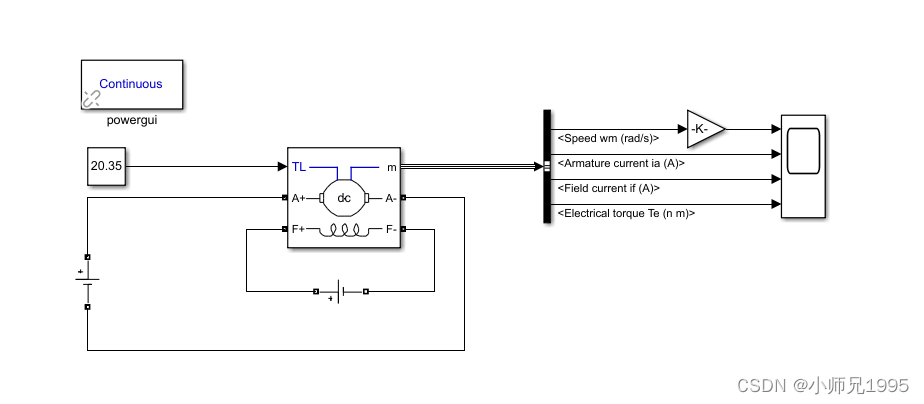
仿真模型由直流电源与直流电机两部分构成,直流电机选择 5HP 240V 1750RMP Field:300V
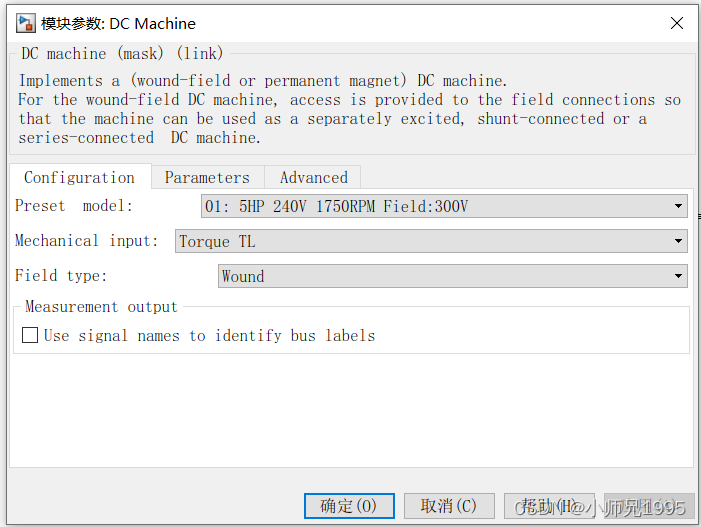
供电电源设置为240V,励磁电源设置为300V,由电机的参数计算出该直流电机的带负载能力(此处设置为恒功率负载)为:
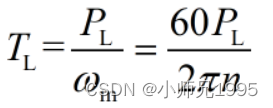
功率:5HP=3728.50W,转速:1750r/min,代入上式计算负载转矩TL:20.35
3.2、仿真结果分析
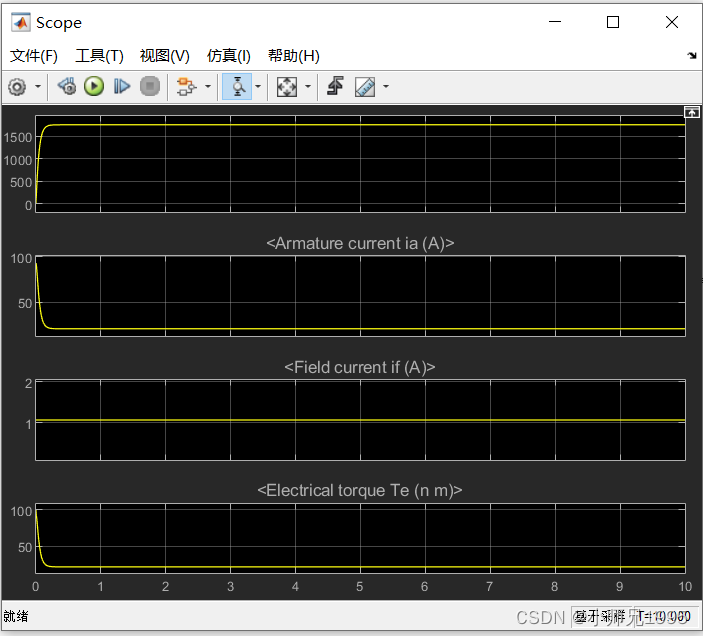
电机转速达到额定转速:1750r/min

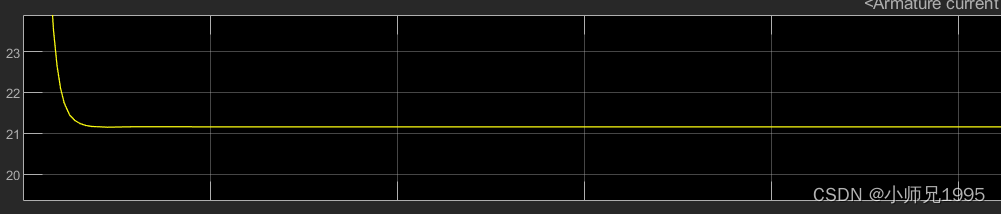
电枢电流约为:21A
励磁电流约为:1.066A

电磁转矩约为:21.4

3.3、直流有刷电机的换向控制
根据直流有刷电机的工作原理可知,当转子线圈中电流的方向发生变化,线圈的受力情况也会发生改变,因此只要改变转子线圈中电流的方向,即可完成直流电机的换向控制。
将上述仿真模型的直流电源输入设置为:-240V;电磁转矩TL设置为:-20.35
3.4、仿真结果分析
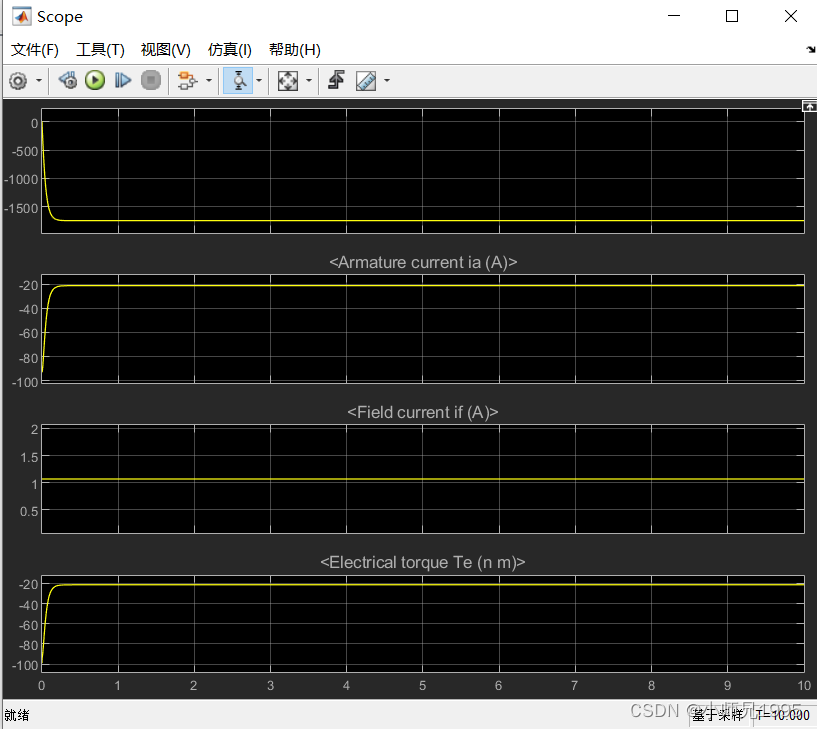
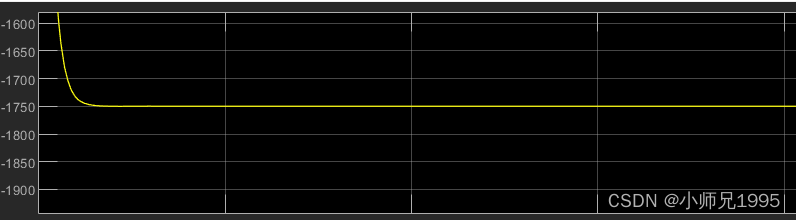
电机达到额定转速:-1750r/min
电枢电流约为:-21A

励磁电流约为:1.066A

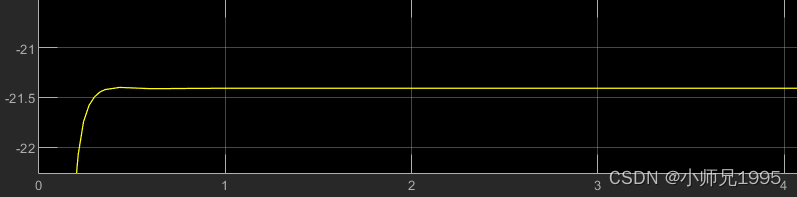
电磁转矩约为:-21.4
总结
分析了直流有刷电机的工作原理,通过Matlab/Simulink实现了直流有刷电机的驱动及换向控制,为后续章节的仿真及分析奠定基础。

















 235
235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









