







rpg_ig_active源码阅读七
接下来主要看rpg_ig_active_reconstruction
这一部分应该会比较复杂
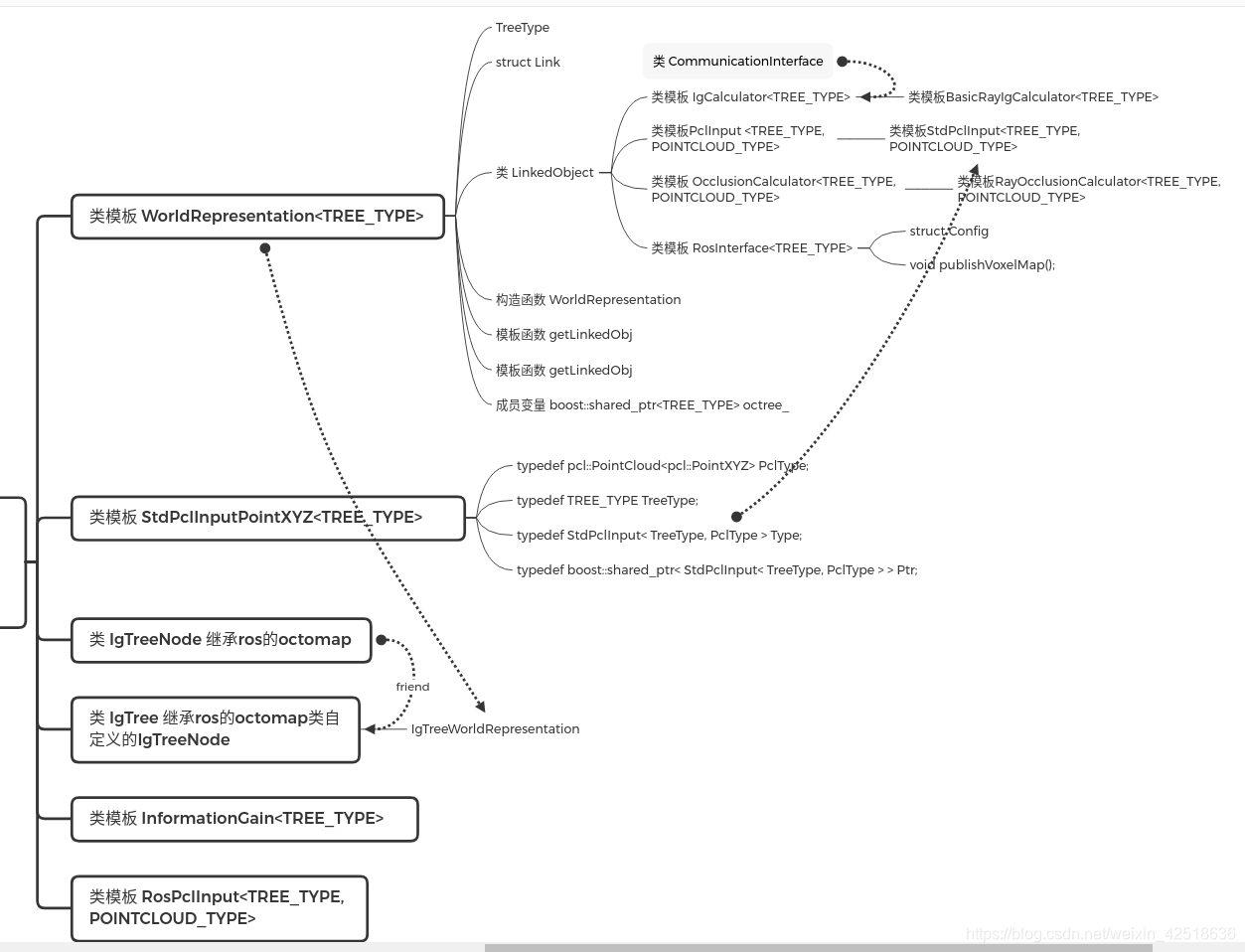
整理了一下octomap里的各个类模板
只有一个可执行的节点,主要看octomap_world_representation.cpp
今天的目标主要看三个有关的
一个是IgTree 这个是类模板WorldRepresentation具体用的节点类型
一个是RosInterface 这个是和ros结合的接口
一个是StdPclInputPointXYZ 这个是与输入有关的设置
IgTree
namespace octomap下的一个类IgTreeNode 是继承的octomap::OcTreeNode
定义了一些关于节点Node的属性,比较重要的三个参数有
- double occ_dist_ 如果节点被遮挡 设置为到附近的已注册的被遮挡的占用节点的最短距离
- double max_dist_ 更新遮挡的最大距离
- bool has_no_measurement_
并将类IgTree设为友元
IgTree则是继承了octomap::OccupancyOcTreeBase<IgTreeNode>
里面重要的是一个config 一个expandNode
struct config
struct Config
{
public:
Config();
public:
double resolution_m; //! OcTree leaf node size, default: 0.1 [m]. 节点大小 默认是0.1m
double occupancy_threshold; //! 占用概率阈值Occupancy probability over which nodes are considered occupied, default: 0.5 [range 0-1].
double hit_probability; //! 匹配的概率更新值Probability update value for hits, default 0.7 [range 0-1].
double miss_probability; //! 未命中概率更新值 Probability update value for misses, default 0.4 [range 0-1].
double clamping_threshold_min; //! 固定概率的最小概率阈值 Min probability threshold over which the probability is clamped, default: 0.12, range [0-1].
double clamping_threshold_max; //! Max probability threshold over which the probability is clamped, default: 0.97, range [0-1].
};
updateOctreeConfig函数则是将这些参数传入octomap里,在构造函数中被调用
void IgTree::updateOctreeConfig()
{
// 这几个函数是ros里octomap的函数 是把config里的各个概率参数传入octomap里
setOccupancyThres(config_.occupancy_threshold);
setProbHit(config_.hit_probability);
setProbMiss(config_.miss_probability);
setClampingThresMin(config_.clamping_threshold_min);
setClampingThresMax(config_.clamping_threshold_max);
}
expandNode函数
// 扩展节点
void IgTree::expandNode(IgTreeNode* node)
{
assert(!nodeHasChildren(node));
for (unsigned int k=0; k<8; k++) {
IgTreeNode* child = createNodeChild(node, k);
// 把node里的数值复制到了child里 具体包括value occ_dist_ max_dist_ 具体可以看octomap_ig_tree_node.cpp
child->copyData(*node);
}
}
RosInterface
总的来说就是根据输入(输入看的是this->link_.octree),把数据填充到rviz的marker里,然后发布名称为occupied_cells_vis_array的话题
这里只提供了到octomap::WorldRepresentation的ROS接口 与输入无关
这个类继承的是WorldRepresentation<TREE_TYPE>::LinkedObject
成员参数有ros::NodeHandle nh_ 和std::string world_frame_name_
其他重要的是一个struct config和publishVoxelMap函数 还有一个ros发布话题用的voxel_map_publisher_
struct config
struct Config
{
ros::NodeHandle nh;
std::string world_frame_name;
};
就是来设置的
构造函数
TEMPT
CSCOPE::RosInterface(Config config)
: nh_(config.nh)
, world_frame_name_(config.world_frame_name)
{
voxel_map_publisher_ = nh_.advertise<visualization_msgs::MarkerArray>("occupied_cells_vis_array", 1);
}
除了设置参数外 就是发布一个名称为occupied_cells_vis_array的消息
publishVoxelMap函数
主要是填充信息
// 在rviz中显示的marker
visualization_msgs::MarkerArray occupiedNodesVis;
设置颜色和大小等等
还有设置frame和时间戳
occupiedNodesVis.markers[i].header.frame_id = world_frame_name_;
occupiedNodesVis.markers[i].header.stamp = ros::Time::now();
最后发布出去
voxel_map_publisher_.publish(occupiedNodesVis);
StdPclInputPointXYZ
很短的几行,一个类模板,其中定义了
- pcl类型
pcl::PointCloud<pcl::PointXYZ>非常标准的点云格式 - TreeType 树的类型 实际用的时候是IgTree
- 用了另外一个类模板
StdPclInput,并传入了参数,实际是
StdPclInput<IgTree, pcl::PointCloudpcl::PointXYZ> - 上面类型的指针
template<class TREE_TYPE>
struct StdPclInputPointXYZ
{
typedef pcl::PointCloud<pcl::PointXYZ> PclType;
typedef TREE_TYPE TreeType;
typedef StdPclInput< TreeType, PclType > Type;
typedef boost::shared_ptr< StdPclInput< TreeType, PclType > > Ptr;
};
StdPclInput 继承的是PclInput
PclInput
template<class TREE_TYPE, class POINTCLOUD_TYPE>
class PclInput: public WorldRepresentation<TREE_TYPE>::LinkedObject
- 一个虚函数
push插入一个新的点云
virtual void push( const Eigen::Transform<double,3,Eigen::Affine>& sensor_to_world, POINTCLOUD_TYPE& pcl )=0; setOcclusionCalculator设置遮挡计算方法的函数
StdPclInput
继承了PclInput<TREE_TYPE,POINTCLOUD_TYPE>
主要是实现了push函数
void push( const Eigen::Transform<double,3,Eigen::Affine>& sensor_to_world, POINTCLOUD_TYPE& pcl );
sensor_to_world 是传感器到世界坐标系的转换
pcl 是在传感器坐标系下的新的数据
目的就是转换到世界坐标系下然后插入到之前的数据后面


















 3179
3179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









