







 本文详细探讨了三维空间中四足机器人的腿部运动学建模,包括正解和逆解的计算,涉及髋关节角度与足端位置的关系,使用了角度与坐标之间的数学转换进行推导,提供了具体的公式和解题步骤。
本文详细探讨了三维空间中四足机器人的腿部运动学建模,包括正解和逆解的计算,涉及髋关节角度与足端位置的关系,使用了角度与坐标之间的数学转换进行推导,提供了具体的公式和解题步骤。
本篇将会三维空间中,对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算
首先,我们来看三维空间中简图:
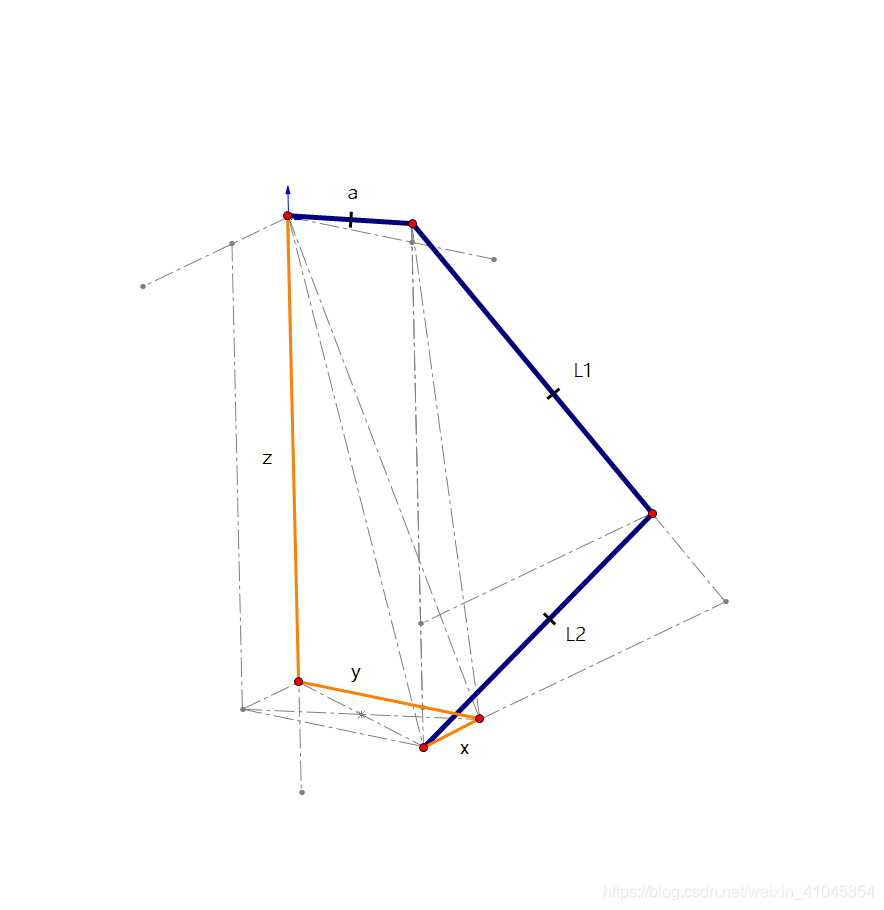
其中a表示髋关节距离主体得偏移,L1,L2共面,与a保持垂直关系,[x,y,z]表示足端相对于髋关节的位置,为了更容易大家理解,我们将视角转换到不同的视图当中去计算几何关系。
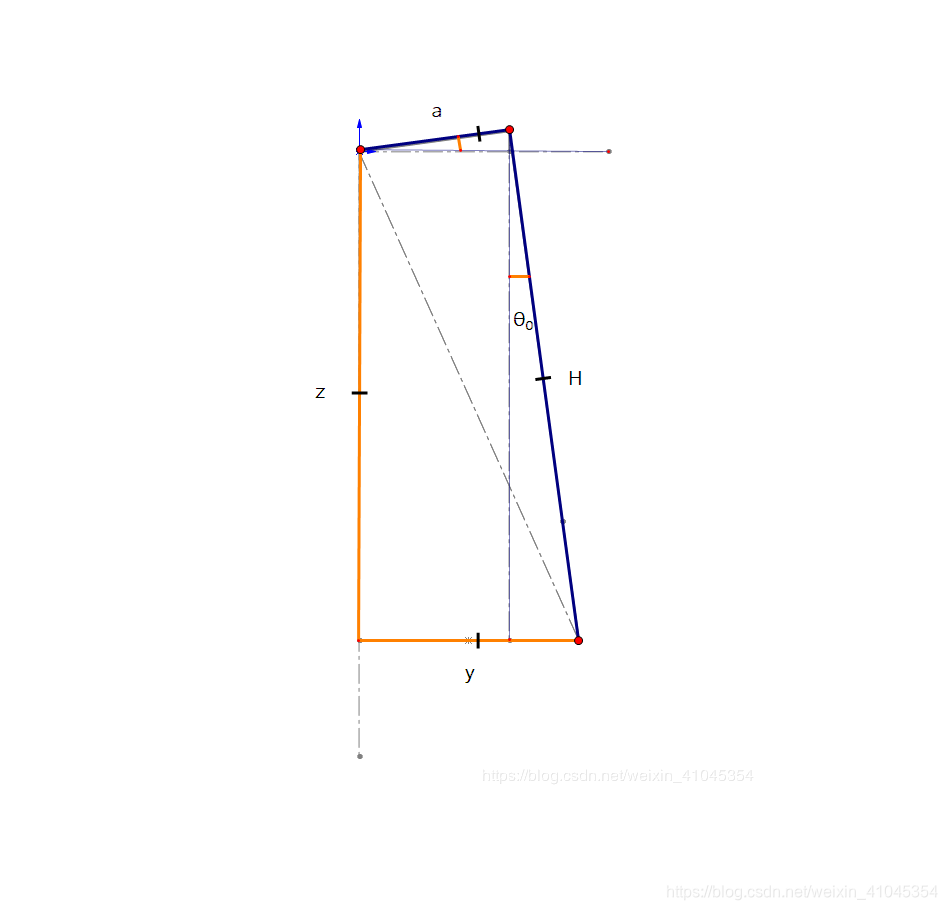
一、正视图:
首先来回一下小学知识:
- 互余:如果两个锐角的和等于90度,那么这两个锐角互为余角
通过互余我们可以证明a与y轴的夹角与图中所示 θ 0 \theta_0 θ0相等。通过其数量关系,我们可以得出:
1、正解(已知 θ 0 \theta_0 θ0)
z = − H cos ( θ 0 ) + a sin ( θ 0 ) (1-1) z = -H\cos(\theta_0) + a\sin(\theta_0) \tag{1-1} z=−Hcos(θ0)+asin(θ0)(1-1)
y = a cos ( θ 0 ) + H sin ( θ 0 ) (1-2) y = a\cos(\theta_0) + H\sin(\theta_0) \tag{1-2} y=acos(θ0)+Hsin(θ0)(1-2)
此时,我们只要求出 H H H,即可得到 z z z与 y y y的值
2、逆解(已知x,y,z)
H 2 = z 2 + y 2 − a 2 (2-1) H^2 = z^2 + y^2 - a^2 \tag{2-1} H2=z2+y2−a2(2-1)
θ 0 = a t a n 2 ( H , a ) − a t a n 2 ( ∣ z ∣ , y ) (2-2) \theta_0 = atan2(H, a) - atan2(|z|, y) \tag{2-2} θ0=atan2(H,a)−atan2(∣z∣,y)(2-2)
在已知xyz的情况下,通过勾股定理我们能够轻易求出 H H H,在正视图我们需要的公式就这么多,接下来转到右视图
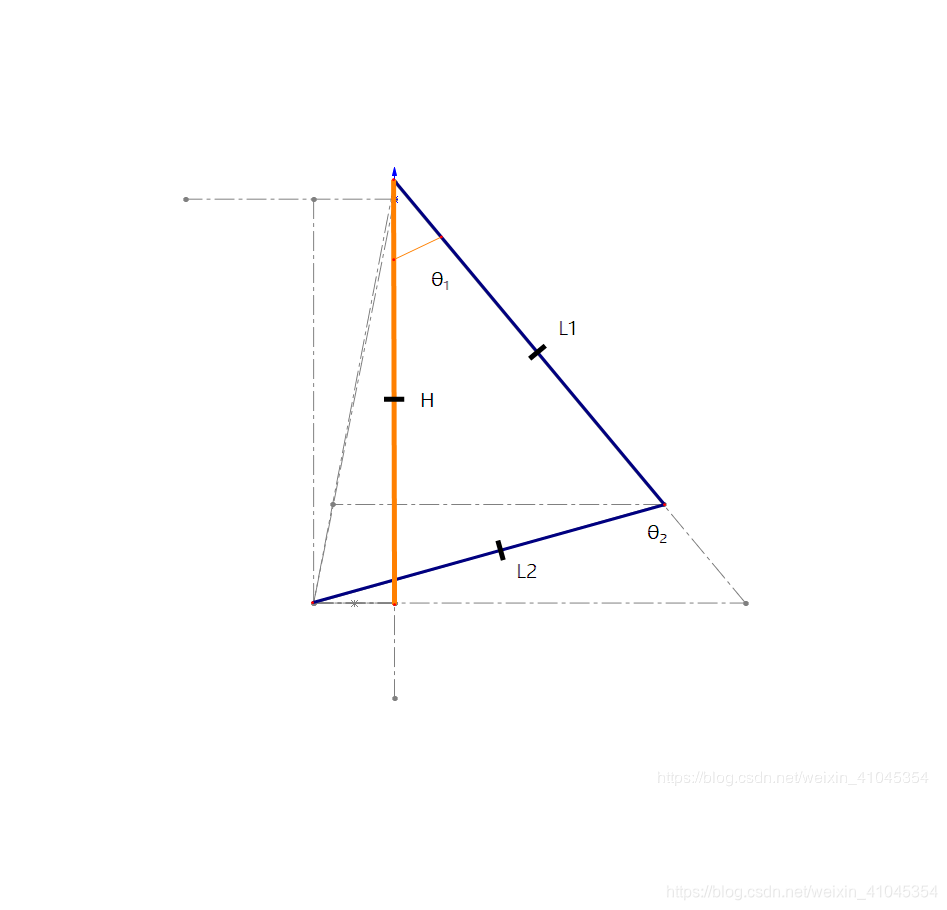
右视图
虽说是右视图,但我们最好不要将其想象成水平向右观看的视图,这里的右视图指的是L1,L2所在平面的视图。这里其实跟二维情况下无疑。H的长度相当于原本的Y轴上的距离。这里就不再重新推导,详情请查看文章
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











