







 本文深入解析gmapping算法,包括先验知识、系统架构、改进策略和粒子滤波实现。介绍了如何利用激光雷达和里程计数据进行SLAM,详细探讨了扫描匹配、权重更新、重采样等关键步骤,并提出了改善提案分布和自适应重采样以应对粒子退化问题。
本文深入解析gmapping算法,包括先验知识、系统架构、改进策略和粒子滤波实现。介绍了如何利用激光雷达和里程计数据进行SLAM,详细探讨了扫描匹配、权重更新、重采样等关键步骤,并提出了改善提案分布和自适应重采样以应对粒子退化问题。
之前记录着就忘记录了,现在补上,欢迎大家一起交流啊~
(二)gmapping原理解析
A、先验知识
- 条件概率公式:
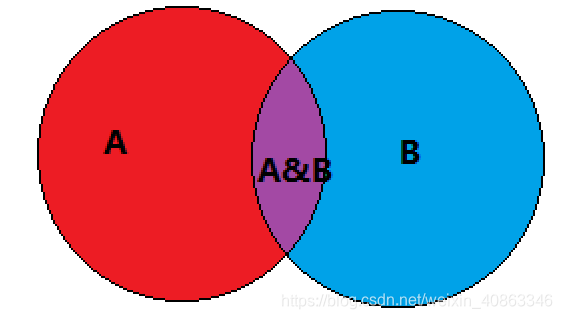
上图中红色为A事件,蓝色为B时间,紫色为A、B事件同时发生的概率,P(A|B)表示B发生的条件下A发生的概率:
![]()
- 全概率公式:
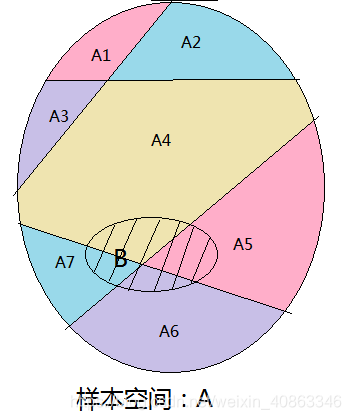
如上图,对于样本空间A,由A1...A7个事件组成,且A1...A7事件两两互斥,即任意两个事件的交集为空集;则对于任意事件B有:

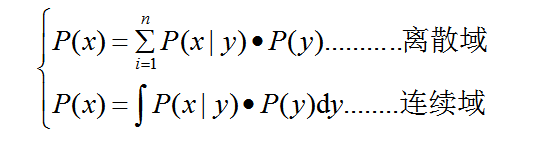
对于离散域和连续域的全概率公式如下:
举例:小明要去上班,有三条路,选择每条路的概率为P(L1)=0.5,P(L2)=0.3,P(L3)=0,2=0.2;每条路不会堵车的概率P(C1)=0.2,P(C2)=0.4,P(C3)=0.7,问小明上班不会堵车的概率?
解:不堵车的事件为C;样本空间为L1,L2,L3;题目的P(C1)=P(C|L1),P(C2)=P(C|L2),P(C3)=P(C|L3)
所以:P(C)=P(L1)*P(C|L1)+P(L2)=P(C|L2)+P(L3)*P(C|L3)=0.36
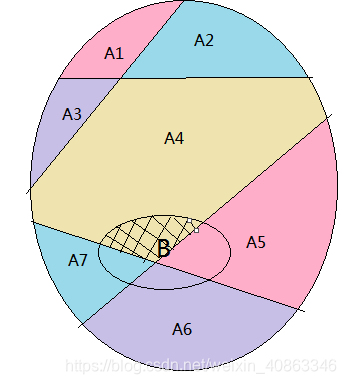
- 贝叶斯公式:
贝叶斯公式其实是由条件概率和全概率公式可以推导出来的,全概率公式是求B事件在A样本空间的概率,而贝叶斯就是已经知道A事件发生了,求样本空间中Ai事件发生的概率,如下图:
公式如下&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5015
5015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









