







vrep用户手册https://www.coppeliarobotics.com/helpFiles/
5.29 更新
1、由于无人机运动空间太大,先把动作离散化,用DQN 训练简易版不收敛,要么reward-1000多,要么-8左右,没有下降趋势。reward是- distance(uav, people),动作分为了前后左右上下旋转共9个,输入是64*64*3的摄像头。
2、尝试用按键输入控制无人机运动,然后用模仿学习。
多线程按键鼠标输入:https://www.jianshu.com/p/11a8e75f5170
5.28更新
第一版仿真程序完成
无人机姿态获取:https://blog.youkuaiyun.com/weixin_34234823/article/details/86129077
5.26 更新
最近的问题:无人机总是乱飞
最近看的教程:http://ulgrobotics.github.io/trs/
https://zhuanlan.zhihu.com/p/143582899
pytorch安装:https://pytorch.org/get-started/locally/
5.12更新:vrep与pyhton 远程链接3种方法
step1
将VREP安装包里面的vrep.py 、vrepConst.py、remoteApi.dll、remoteApi.so拷到Python工程目录下
step2
最简单的方法1:不用修改script,直接在pyhton程序中写:
clientID = vrep.simxStart("127.0.0.1", 19997, True, True, 5000, 5) # 建立和服务器的连接方法2:在verp端,mainscript中添加一句simRemoteApi.start(19999) 进行端口监听。
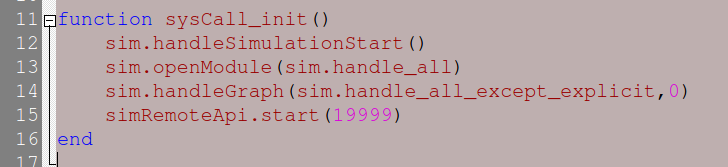
方法3:在vrep端,需要控制的object的child_script里的init函数里添加一句:

信息传输
number returnCode,string signalValue=simxGetStringSignal(number clientID,string signalName,number operationMode)
number returnCode=simxSetStringSignal(number clientID,string signalName,string signalValue,number operationMode)1、教程 vrep与ros
https://www.jianshu.com/p/839c4defd4fb
https://www.cnblogs.com/21207-iHome/tag/V-rep/
2、vrep用python
控制小车视觉跟踪
https://www.bilibili.com/video/av99625911/
控制UAVhttps://blog.youkuaiyun.com/qq_33883462/article/details/80969150

















 819
819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









