







自动驾驶运动规划中会用到各种曲线,主要用于生成车辆的轨迹,常见的轨迹生成算法,如贝塞尔曲线,样条曲线,以及apollo EM Planner的五次多项式曲线。城市场景中使用的是分段多项式曲线,在EM Planner和Lattice Planner中思路是,都是先通过动态规划生成点,再用5次多项式生成曲线连接两个点(虽然后面的版本改动很大,至少Lattice planner目前还是这个方法)。
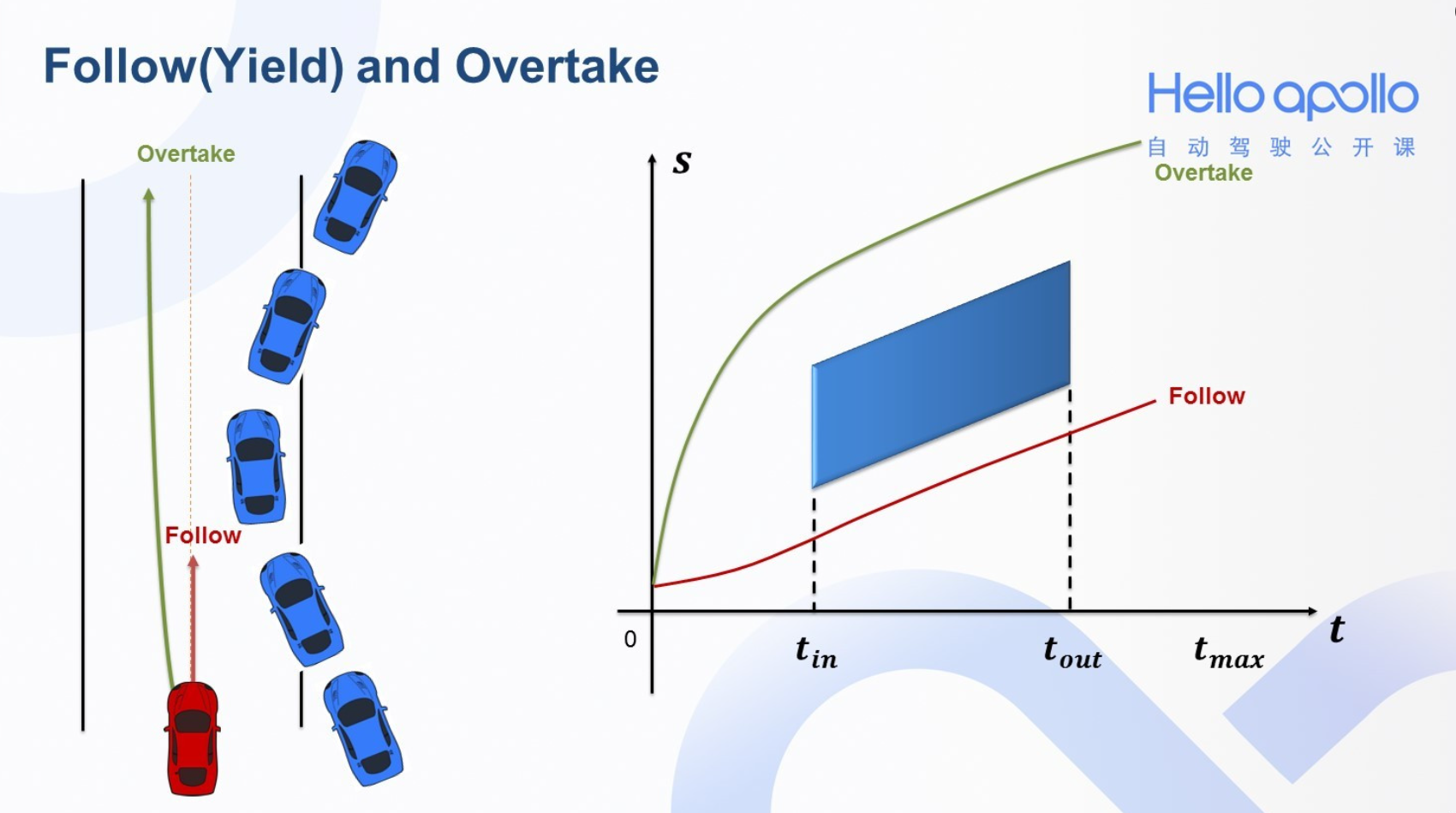
在这里可以看出5次多项式的作用,就是生成轨迹。这里的轨迹不一定是车行驶的轨迹,比如S—T图中的线,是用来做速度规划的。 如下图:
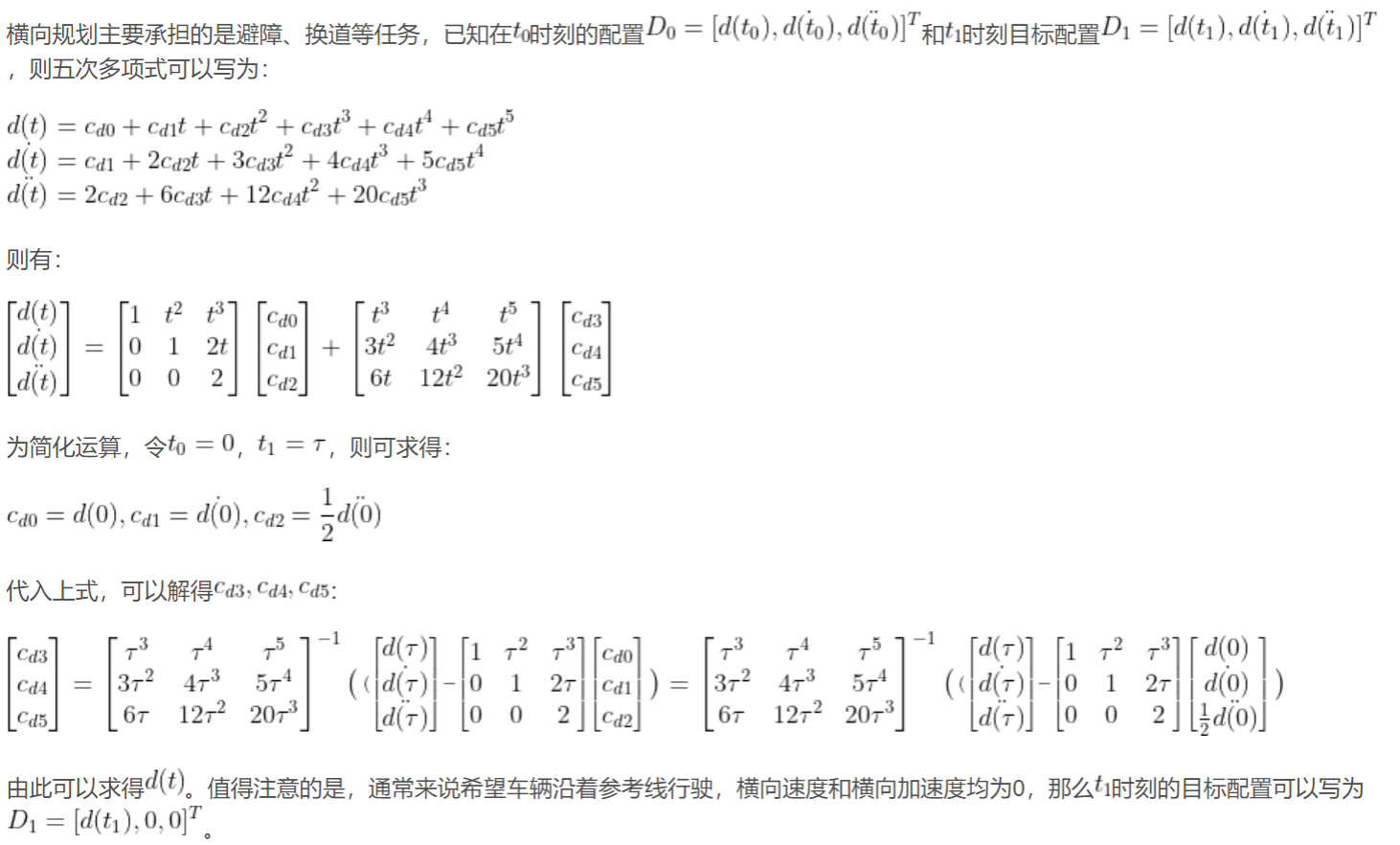
 在Apollo里面用到了3-5次多项式:cubic_polynomial_curve1d(三次多项式曲线)、quartic_polynomial_curve1d(四次多项式曲线)和quintic_polynomial_curve1d(五次多项式曲)线。在此我们介绍下五次多项式在横向规划下的使用。
在Apollo里面用到了3-5次多项式:cubic_polynomial_curve1d(三次多项式曲线)、quartic_polynomial_curve1d(四次多项式曲线)和quintic_polynomial_curve1d(五次多项式曲)线。在此我们介绍下五次多项式在横向规划下的使用。
其中,t代表时间,d代表S-L坐标系下的横向偏差。因为是使用多项式连接两个已知点,所以两个轨迹点的信息是已知的。假设起始的t=0时刻,横向位置,横向车速
,横向加速度
,t=tp时刻,横向位置
,横向车速
,横向加速度
(通常我们认为应该是跟踪轨迹稳定行驶,即横向车速
和横向加速度
均为0),则对公式求导得:
则有:
六个变量六个方程因此可以求解得出:
公式的计算结果可使用matlab来处理。具体参考:MATLAB求解多元一次方程组-优快云博客。
关于t=tp时刻的横向位置,横向车速
,横向加速度
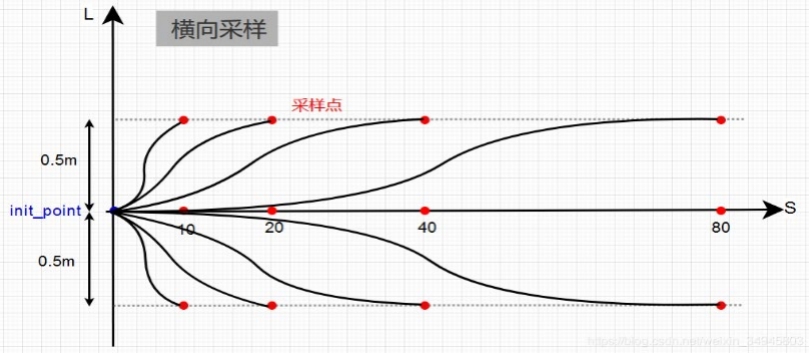
,可以按照横向位置和到达时间对终点进行多组的采样。
 假设横向的范围d∈[-4,4],时间范围t∈[4,12]。在t=0时刻的状态为[0,0,0](初始位置,无横向速度,无横向加速度),t=tp时刻的状态为[d,0,0](横向d位置,无横向速度,无横向加速度)。 使用MATLAB回执多项式的拟合曲线的脚本:
假设横向的范围d∈[-4,4],时间范围t∈[4,12]。在t=0时刻的状态为[0,0,0](初始位置,无横向速度,无横向加速度),t=tp时刻的状态为[d,0,0](横向d位置,无横向速度,无横向加速度)。 使用MATLAB回执多项式的拟合曲线的脚本:
clc;
clear;
close;
figure(1)
hold on
for p = -4:1:4
for t = 4:4:12
c = polynomial(0,0,0,p,0,0,t);
end
end
function c = polynomial(x0,dx0,ddx0,xp,dxp,ddxp,tp)
c = zeros(1,6);
syms c0 c1 c2 c3 c4 c5
% 定义一次方程
eq1 = c0 == x0;
eq2 = c1 == dx0;
eq3 = 2*c2 == ddx0;
eq4 = c0 + c1*tp + c2*tp^2 + c3*tp^3 + c4*tp^4 + c5*tp^5 == xp;
eq5 = c1 + 2*c2*tp + 3*c3*tp^2 + 4*c4*tp^3 + 5*c5*tp^4 == dxp;
eq6 = 2*c2 + 6*c3*tp + 12*c4*tp^2 + 20*c5*tp^3 == ddxp;
% 解方程组
sol = solve([eq1, eq2, eq3, eq4, eq5, eq6], [c0,c1,c2,c3,c4,c5]);
%
c(1) = sol.c0;
c(2) = sol.c1;
c(3) = sol.c2;
c(4) = sol.c3;
c(5) = sol.c4;
c(6) = sol.c5;
%
c0 = c(1);
c1 = c(2);
c2 = c(3);
c3 = c(4);
c4 = c(5);
c5 = c(6);
accuracy = 0.1;
n = tp / accuracy + 1;
arr = zeros(n,2);
for i = 0:n-1
t = i*accuracy;
arr(i+1,1) = t;
arr(i+1,2) = (((((c5*t)+c4)*t+c3)*t+c2)*t+c1)*t+c0;
end
plot(arr(:,1),arr(:,2),'r-',LineWidth=2);
end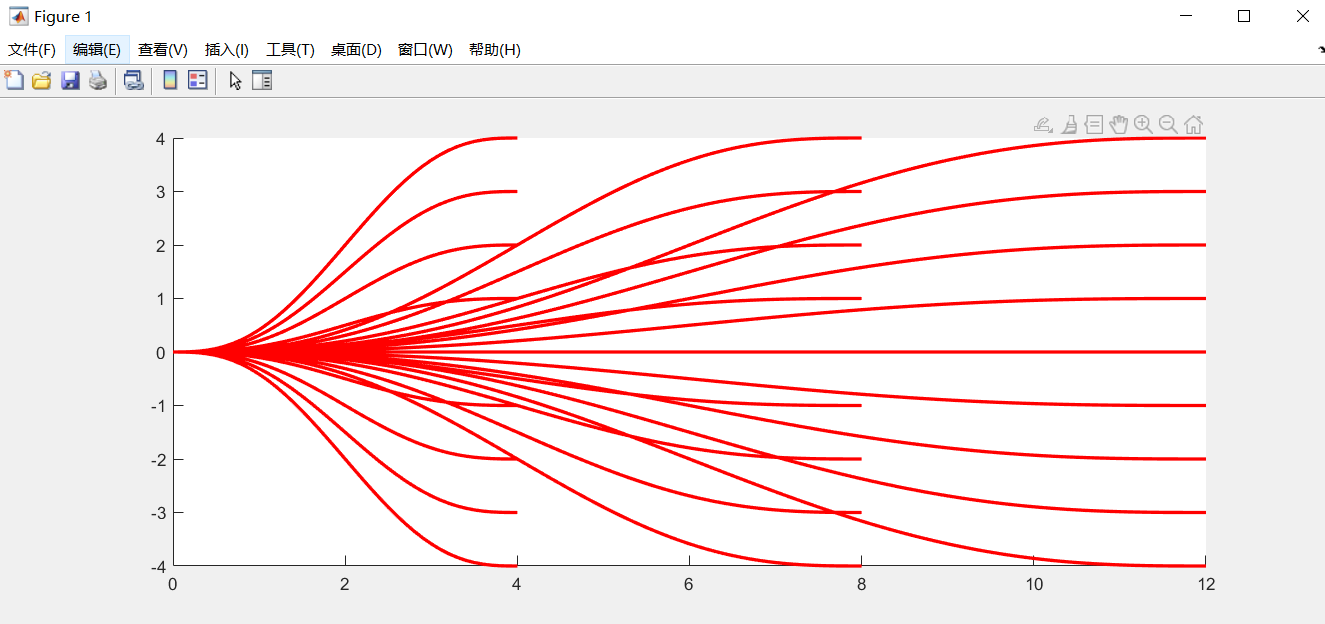
除此之外,还可以用矩阵求逆的方式来求解:
可以看成矩阵:
则
可以用:Eigen::Vector3f c = A.colPivHouseholderQr().solve(B)求解。缺点是可能比较耗时。
// polynomial parameters
QuinticPolynomial(float xs_, float vxs_, float axs_, float xe_, float vxe_,
float axe_, float T)
: xs(xs_),
vxs(vxs_),
axs(axs_),
xe(xe_),
vxe(vxe_),
axe(axe_),
a0(xs_),
a1(vxs_),
a2(axs_ / 2.0) {
Eigen::Matrix3f A;
A << std::pow(T, 3), std::pow(T, 4), std::pow(T, 5), 3 * std::pow(T, 2),
4 * std::pow(T, 3), 5 * std::pow(T, 4), 6 * T, 12 * std::pow(T, 2),
20 * std::pow(T, 3);
Eigen::Vector3f B;
B << xe - a0 - a1 * T - a2 * std::pow(T, 2), vxe - a1 - 2 * a2 * T,
axe - 2 * a2;
Eigen::Vector3f c_eigen = A.colPivHouseholderQr().solve(B);
a3 = c_eigen[0];
a4 = c_eigen[1];
a5 = c_eigen[2];
};参考链接:

















 783
783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









