









【背景介绍】
无人系统常常面临对特定目标进行跟踪侦察的任务需求,这就要求无人系统要具备对目标进行识别以及对目标进行定位的能力,同时,任务一般发生在一段连续时间跨度,而相同目标存在被单个机器人重复发现,或者被多个机器人重复发现的情况,这里就还需要用到目标重识别,对相同目标进行去重处理。看过我之前博客的同志,会了解到我做过目标检测、可见光相机和激光雷达数据融合、以及行人重识别等工作;没错,那些工作都是为这里的目标识别与定位任务做铺垫的。

【算法验证平台】
ZED双目相机
Robosence激光雷达
NVIDIA GeForce RTX 3070
【算法部署平台】
ZED双目相机
Robosence激光雷达
因特尔寒霜峡谷NUC(I7版本)
松灵Scout MINI底盘
【软件技术栈】
zed-ros-wrapper
rslidar_sdk
data_fusion
darknet_ros
object_tracker
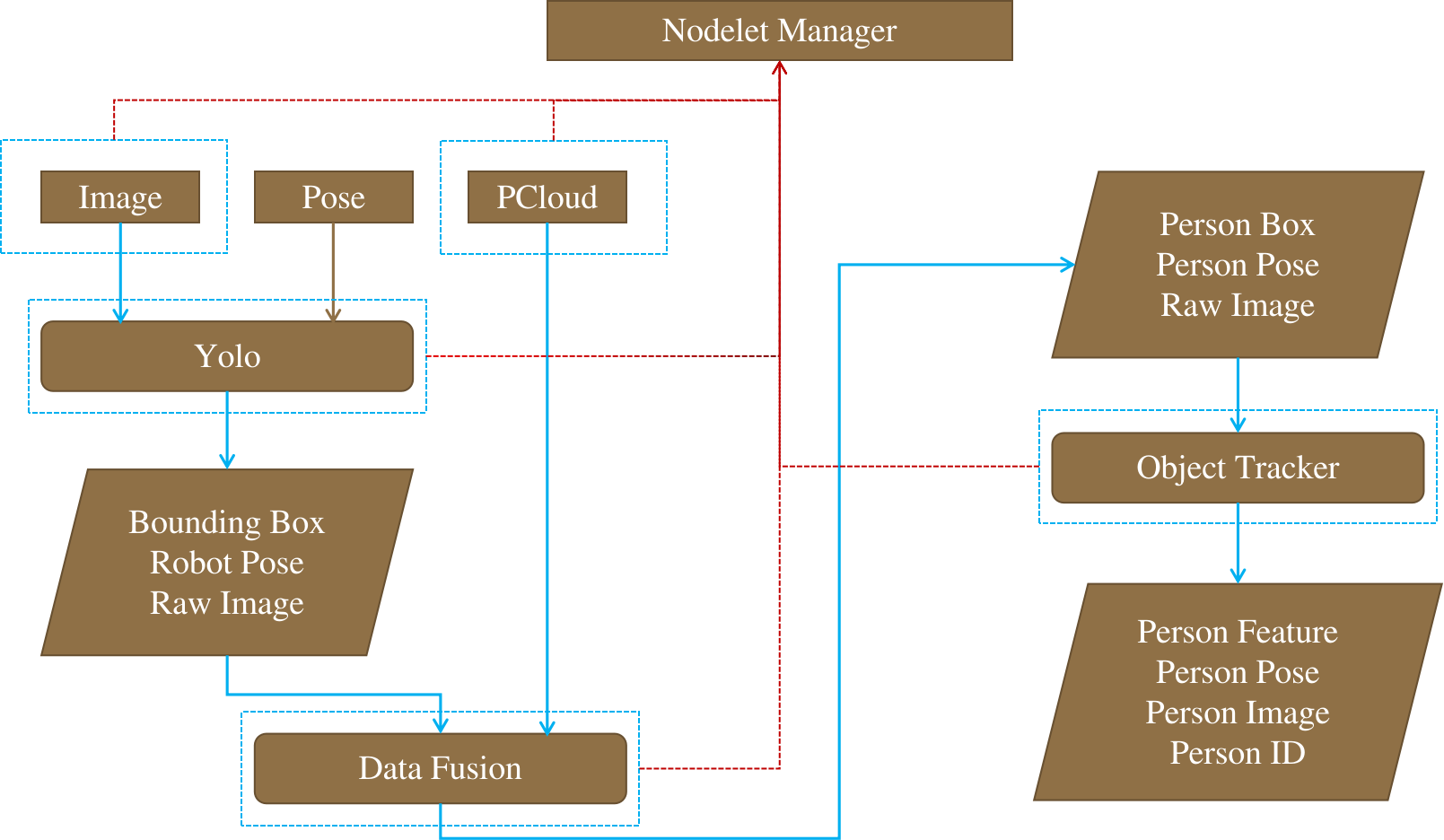
【实现流程图】
【效果视频】
有时间再补拍一个上传。。。
【后期改进】
1、目标识别部分采用了更轻量级的Yolo-Lite模型,NUC上目标检测速率可达到20FPS
2、目标重识别部分采用了更轻量级的Mobile-Net网络,分类速率大大提升
3、优化了点云和图像的融合,点云重投影精度大大提升

















 4604
4604

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









