










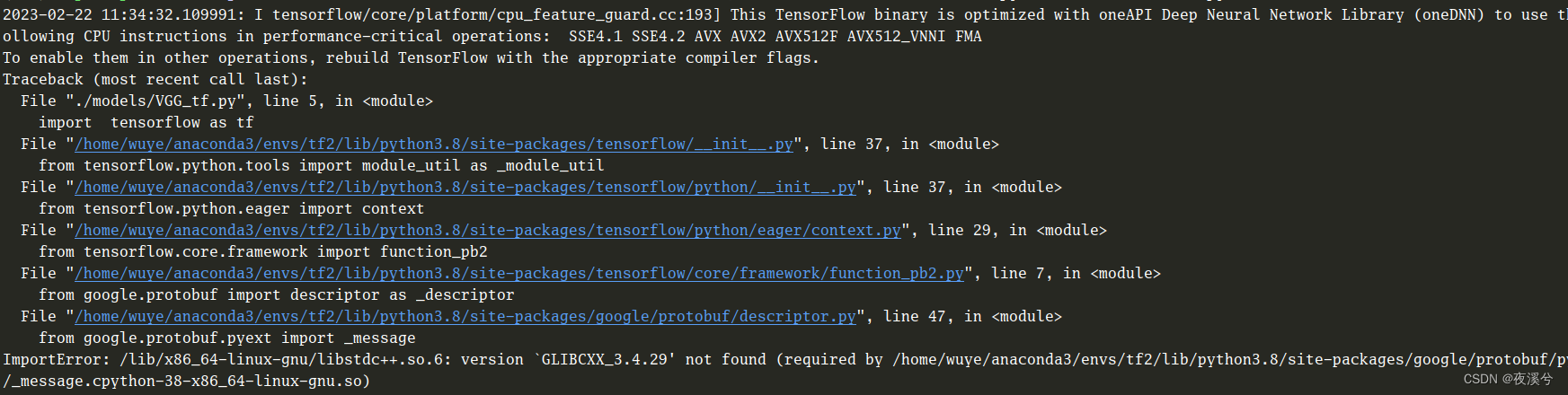
首先,运行时出现的问题如下:
ImportError: /lib/x86_64-linux-gnu/libstdc++.so.6: version `GLIBCXX_3.4.29' not found (required by /home/wuye/anaconda3/envs/tf2/lib/python3.8/site-packages/google/protobuf/pyext/_message.cpython-38-x86_64-linux-gnu.so)
这个是默认路径下的libstdc++.so.6缺少GLIBCXX_3.4.29,解决方法,如下所示:
(1)使用指令先看下系统目前都有哪些版本的
strings /usr/lib/x86_64-linux-gnu/libstdc++.so.6 | grep GLIBCXX
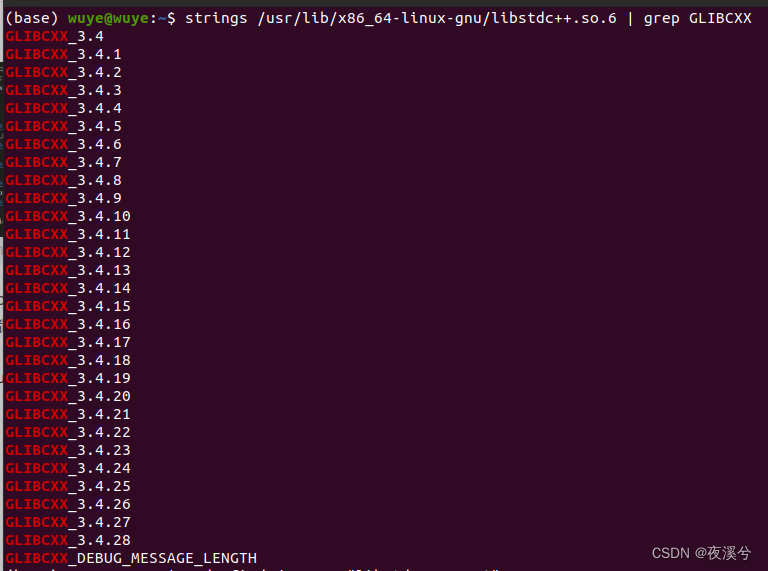
我这里只到3.28,所以确定是缺少GLIBCXX_3.4.29。
(2)来查看当前系统中其它的同类型文件,找到一个版本比较高的
sudo find / -name "libstdc++.so.6*"
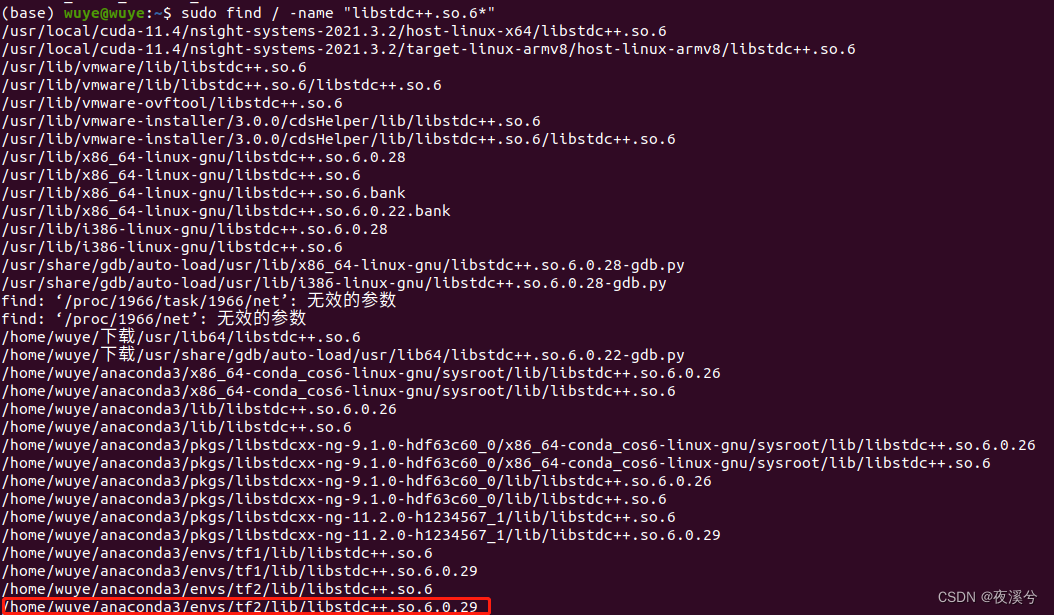
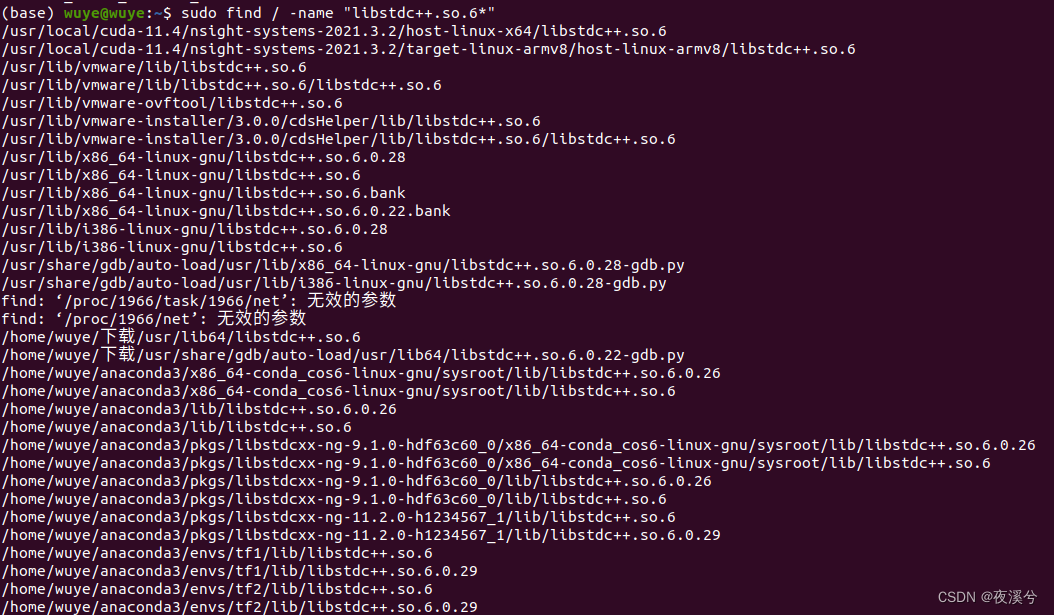
版本比较多,就选了一个版本较高的,我这里是3.4.29,使用之前的指令看看其是否包含需要的版本:
strings /home/wuye/anaconda3/envs/tf2/lib/libstdc++.so.6.0.29 | grep GLIBCXX
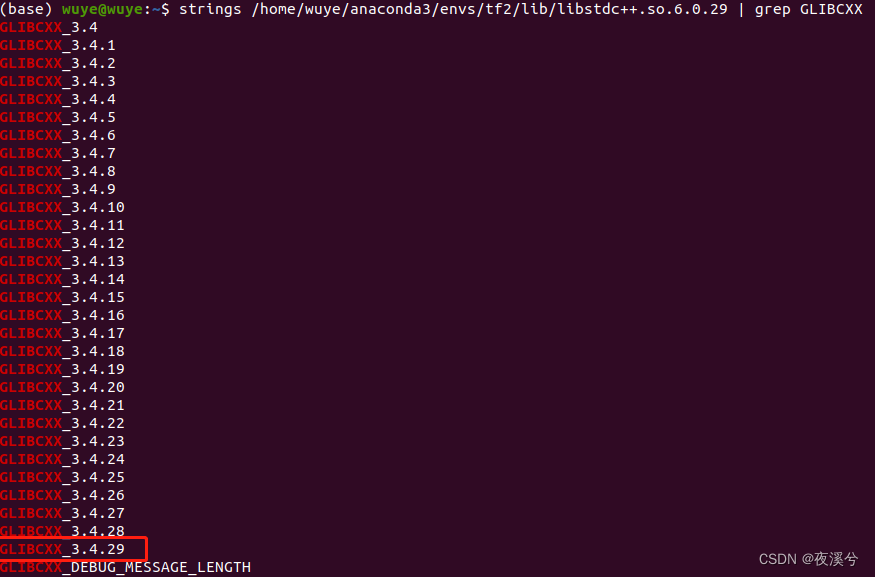
可以看到有需要的版本,接下来就是建立新的链接到这个文件上
(3)复制到指定目录并建立新的链接
# 复制
sudo cp /home/wuye/anaconda3/envs/tf2/lib/libstdc++.so.6.0.29 /usr/lib/x86_64-linux-gnu/
# 删除之前链接
sudo rm /usr/lib/x86_64-linux-gnu/libstdc++.so.6
# 创建新的链接
sudo ln -s /usr/lib/x86_64-linux-gnu/libstdc++.so.6.0.29 /usr/lib/x86_64-linux-gnu/libstdc++.so.6
之后程序一般是能够成功运行的
【注意】有时候由于权限问题,我们需要查看它们的权限
ll /usr/lib/x86_64-linux-gnu/libstd*


















 605
605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









