










在机器人、自动驾驶或三维视觉中,经常需要将两个不同坐标系(如相机坐标系和世界坐标系)统一到同一个参考系下。以下是系统化的解决方案,涵盖数学原理、算法实现和实际应用。
一、问题描述

设两个坐标系:
-
坐标系A(如世界坐标系)
-
坐标系B(如相机坐标系)
已知:
-
坐标系B中的点 pB需要转换到坐标系A中。
-
目标:找到变换矩阵 R,将所有点从坐标系B统一到坐标系A
二、数学原理
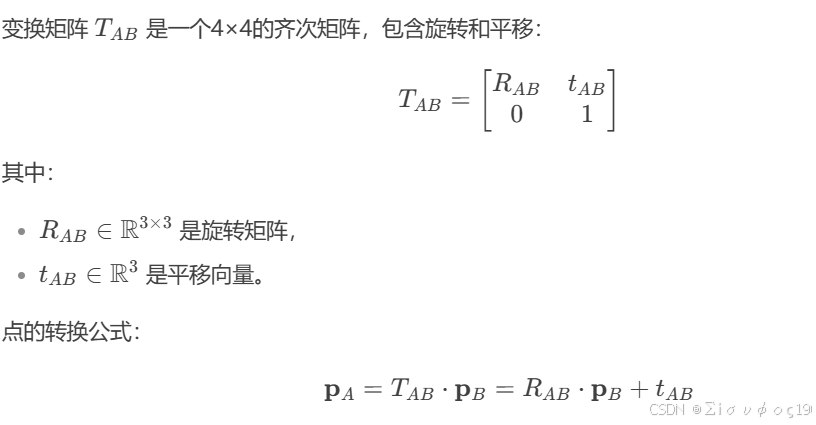
齐次变换矩阵:
四元数:

三、求解变换矩阵
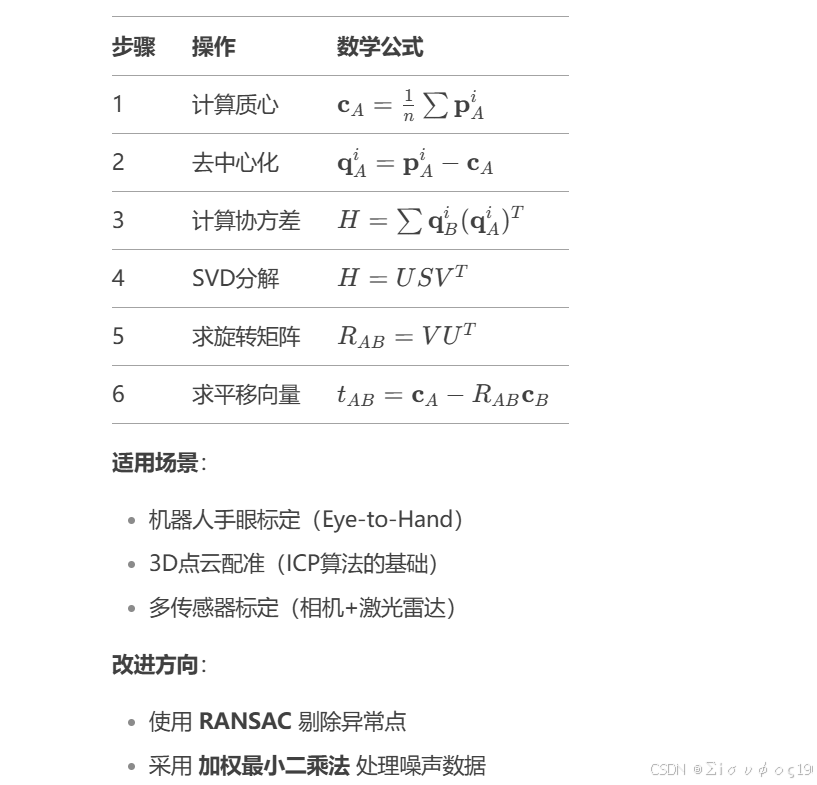
方法1:已知对应点(最小二乘法)
适用场景

步骤:

案例 Python实现1:
import numpy as np
def solve_umeyama(points_A, points_B):
# points_A 和 points_B 是 Nx3 的数组
centroid_A = np.mean(points_A, axis=0)
centroid_B = np.mean(points_B, axis=0)
H = (points_B - centroid_B).T @ (points_A - centroid_A)
U, S, Vt = np.linalg.svd(H)
R = Vt.T @ U.T
if np.linalg.det(R) < 0:
Vt[-1, :] *= -1
R = Vt.T @ U.T
t = centroid_A - R @ centroid_B
T = np.eye(4)
T[:3, :3] = R
T[:3, 3] = t
return T 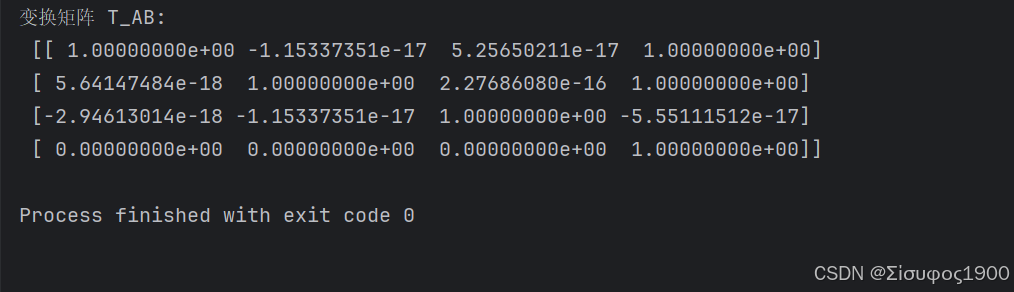
案例 Python实现2:
import numpy as np
def compute_transform(points_A, points_B):
"""
使用最小二乘法计算变换矩阵 T_{AB},使得 p_A = T_{AB} * p_B
参数:
points_A (np.ndarray): (N, 3) 的数组,坐标系A下的点集
points_B (np.ndarray): (N, 3) 的数组,坐标系B下的点集
返回:
T_AB (np.ndarray): 4x4 齐次变换矩阵
"""
# 计算质心
centroid_A = np.mean(points_A, axis=0)
centroid_B = np.mean(points_B, axis=0)
# 去中心化坐标
q_A = points_A - centroid_A
q_B = points_B - centroid_B
# 计算协方差矩阵 H
H = q_B.T @ q_A
# SVD 分解求旋转
U, S, Vt = np.linalg.svd(H)
R = Vt.T @ U.T
# 处理反射情况
if np.linalg.det(R) < 0:
Vt[-1, :] *= -1
R = Vt.T @ U.T
# 计算平移
t = centroid_A - R @ centroid_B
# 构造齐次变换矩阵
T = np.eye(4)
T[:3, :3] = R
T[:3, 3] = t
return T
points_B = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]])
points_A = np.array([[2, 1, 0], [1, 2, 0], [1, 1, 1]])
T_AB = compute_transform(points_A, points_B)
print("变换矩阵 T_AB:\n", T_AB)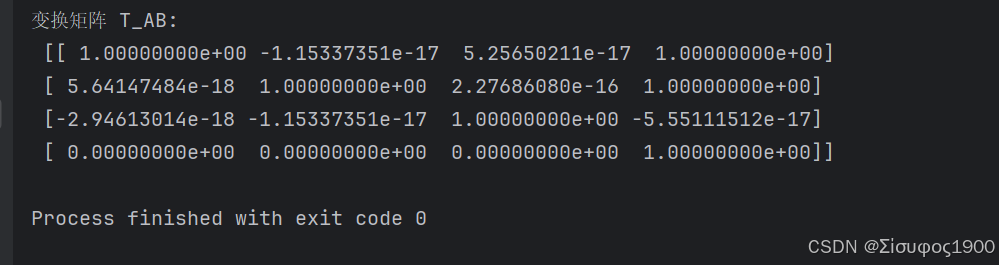
案例 Python实现1和 案例 Python实现2 结果是一样的
总结
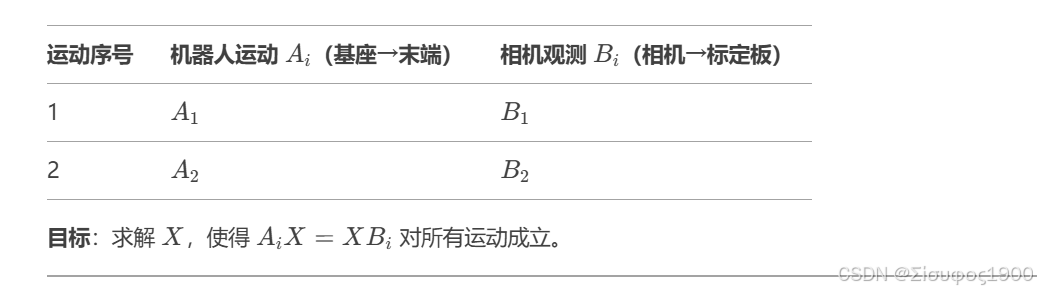
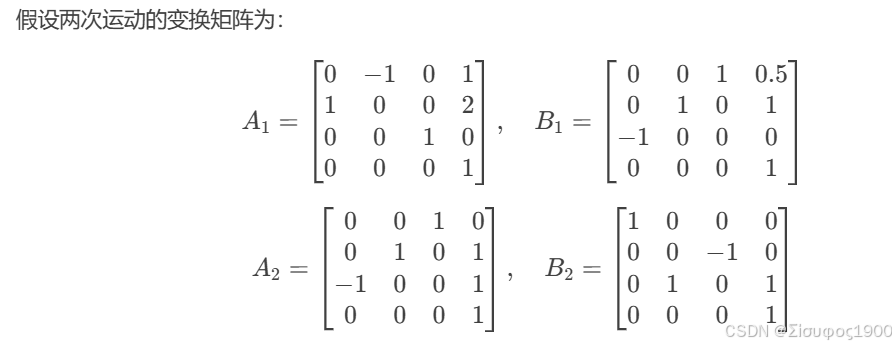
方法2:手眼标定(AX=XB问题)
假设我们有一个机械臂(坐标系A)和一个固定相机(坐标系B),机械臂末端执行器移动了两次,记录的运动数据如下:
适用场景:

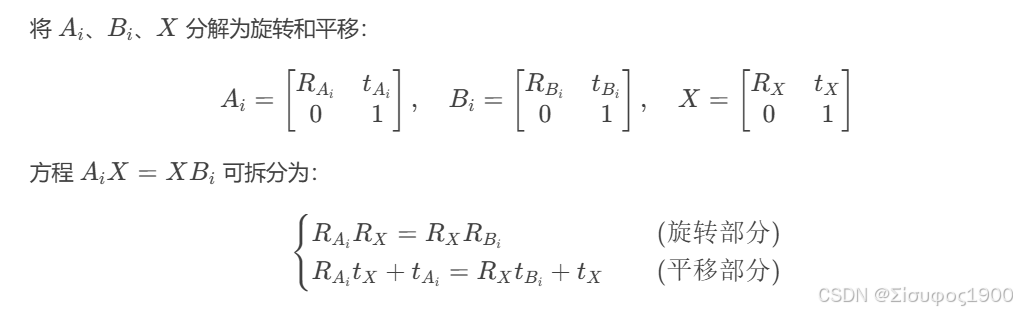
数学建模
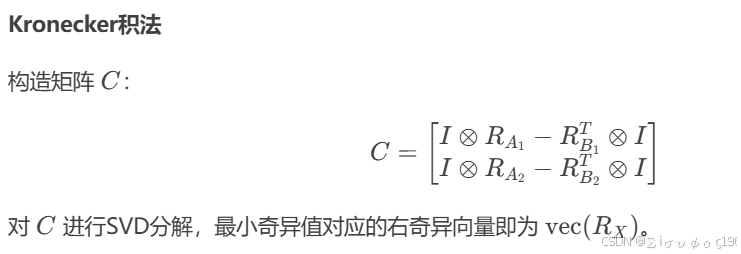
变换矩阵分解
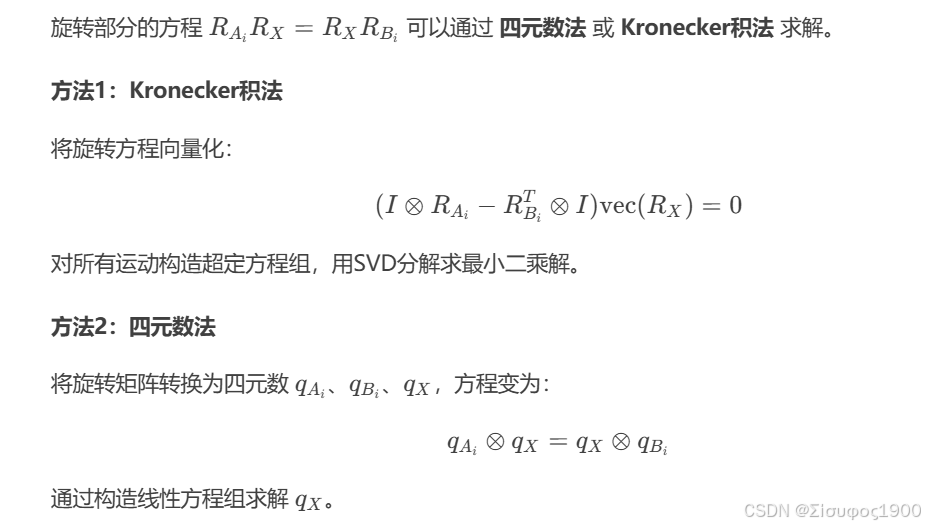
旋转部分求解
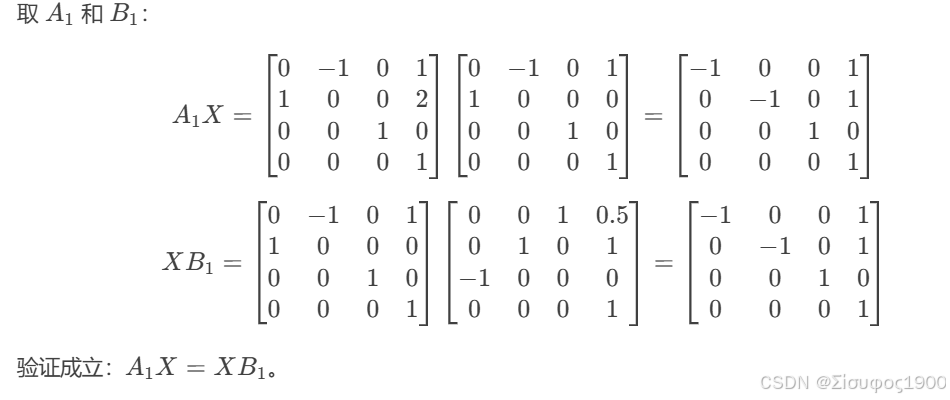
案例:
结果:

import numpy as np
def solve_rotation(A_list, B_list):
C = []
for A, B in zip(A_list, B_list):
RA = A[:3, :3]
RB = B[:3, :3]
C.append(np.kron(np.eye(3), RA) - np.kron(RB.T, np.eye(3)))
C = np.vstack(C)
_, _, V = np.linalg.svd(C)
R_X = V[-1, :].reshape(3, 3)
# 正交化
U, S, Vt = np.linalg.svd(R_X)
R_X = U @ Vt
return R_X平移部分求解


结果:

最终变换矩阵

验证
总结 Python 实现:
def solve_hand_eye(A_list, B_list):
# A_list 和 B_list 是多个运动变换对
M = []
for A, B in zip(A_list, B_list):
RA = A[:3, :3]
RB = B[:3, :3]
M.append(np.kron(np.eye(3), RA) - np.kron(RB.T, np.eye(3)))
M = np.vstack(M)
_, _, V = np.linalg.svd(M)
X = V[-1, :].reshape(3, 3)
# 正交化旋转矩阵
U, S, Vt = np.linalg.svd(X)
R = U @ Vt
return R四、多坐标系统一
deepseek搜的,没有验证,只看思路
在机器人、自动驾驶或增强现实中,常需要将多个传感器(如相机、激光雷达、IMU)的坐标系统一到同一个全局坐标系。以下是系统化的解决方案,涵盖数学原理、算法选择和代码实现。
问题描述
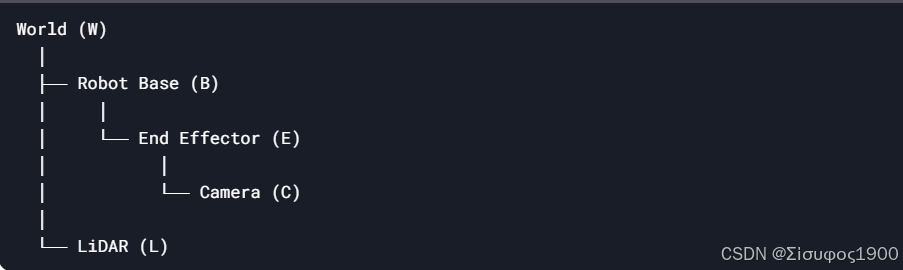
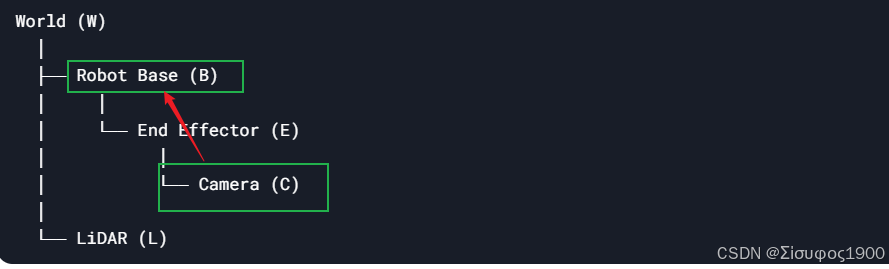
假设我们有以下三个坐标系:
-
世界坐标系(W):全局参考系
-
机器人基座坐标系(B)
-
相机坐标系(C)
-
激光雷达坐标系(L)
已知:
-
机器人基座到末端执行器的变换:
T_BE(通过运动学计算) -
相机到末端执行器的变换:
T_EC(通过手眼标定获得) -
激光雷达检测到的标定板位姿:
T_LBoard -
相机检测到的同一标定板位姿:
T_CBoard
目标
将所有传感器数据统一到世界坐标系(W)下。
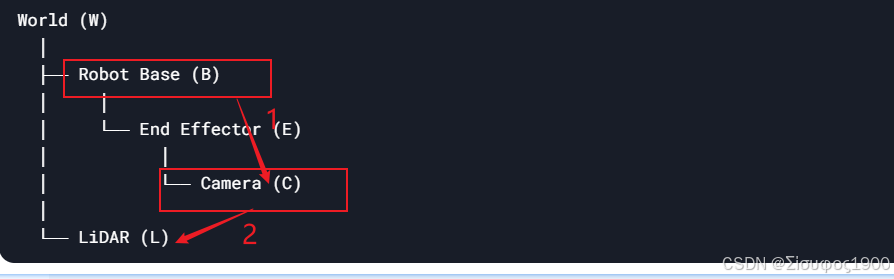
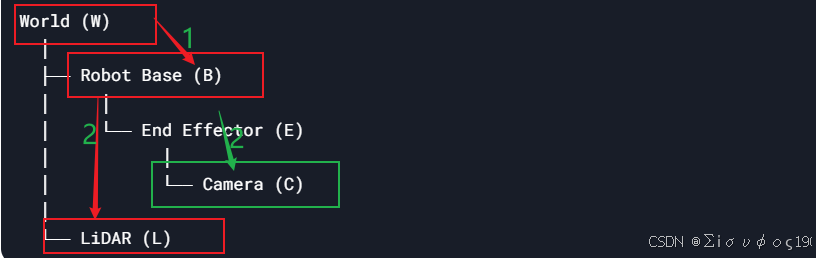
坐标系关系图
 变换矩阵计算步骤
变换矩阵计算步骤
计算相机到激光雷达的变换 T_CL
import numpy as np
# 标定板在相机和激光雷达中的位姿
T_CBoard = np.array([...]) # 4x4齐次矩阵
T_LBoard = np.array([...]) # 4x4齐次矩阵
# 计算 T_CL
T_CL = T_CBoard @ np.linalg.inv(T_LBoard)计算机器人基座到相机的变换 T_BC

T_BE = np.array([...]) # 机器人基座到末端的变换
T_EC = np.array([...]) # 末端到相机的变换(手眼标定结果)
T_BC = T_BE @ T_EC
计算机器人基座到激光雷达的变换 T_BL

 统一到世界坐标系
统一到世界坐标系



















 3547
3547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









