







一、双目相机模型
 通过计算时差形成视差图计算深度
通过计算时差形成视差图计算深度
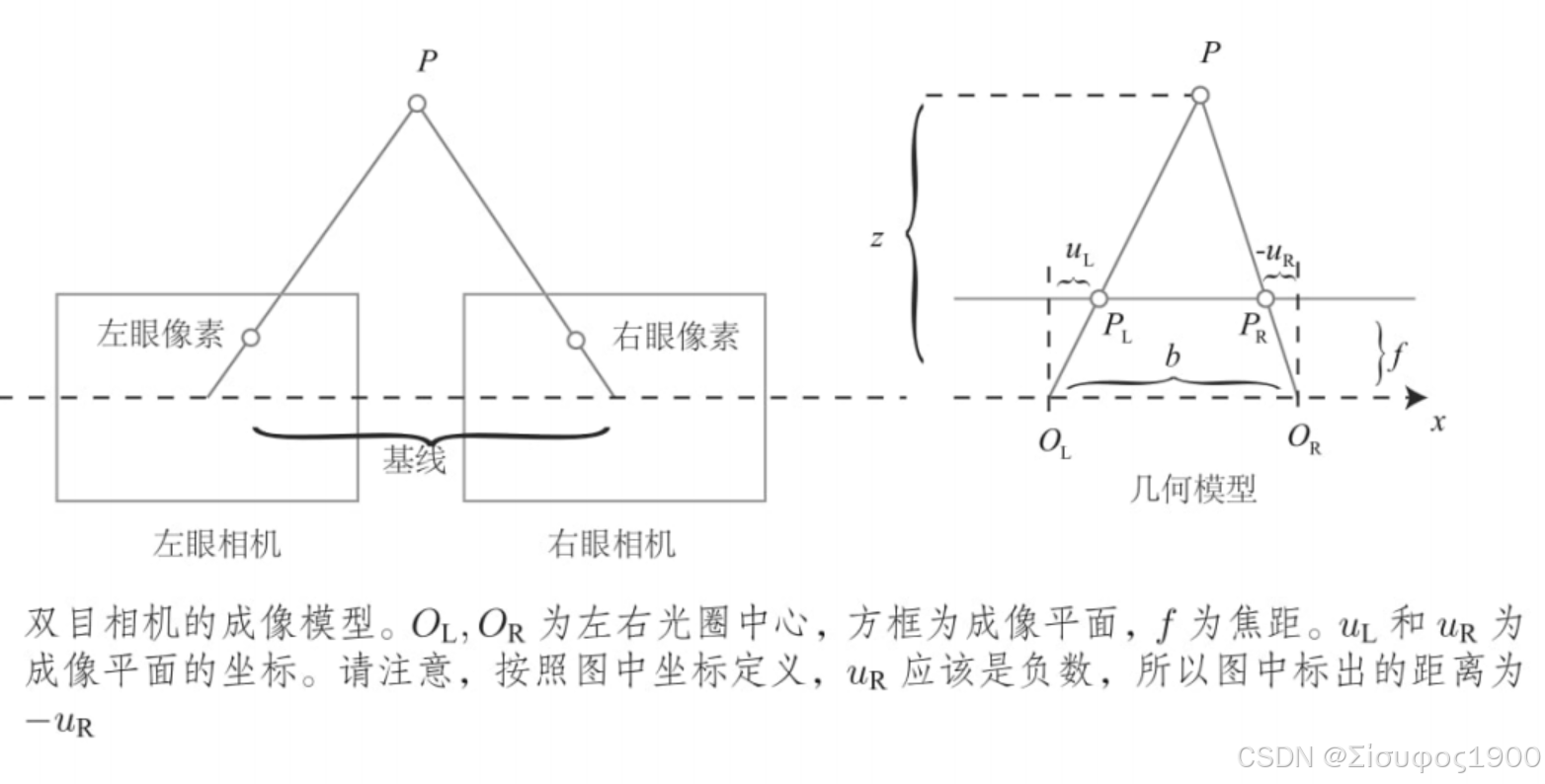
根据相似三角形的原理:
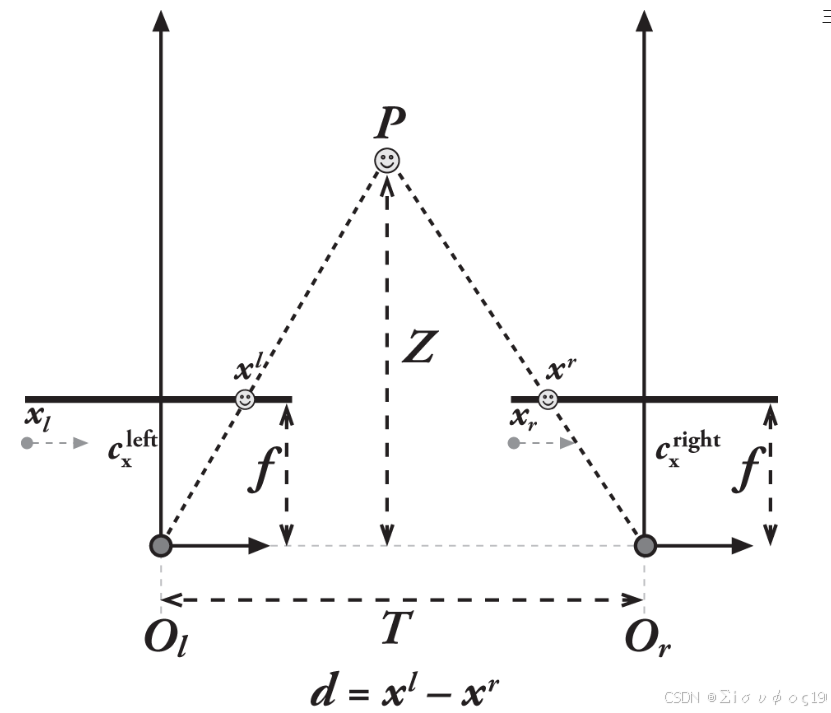
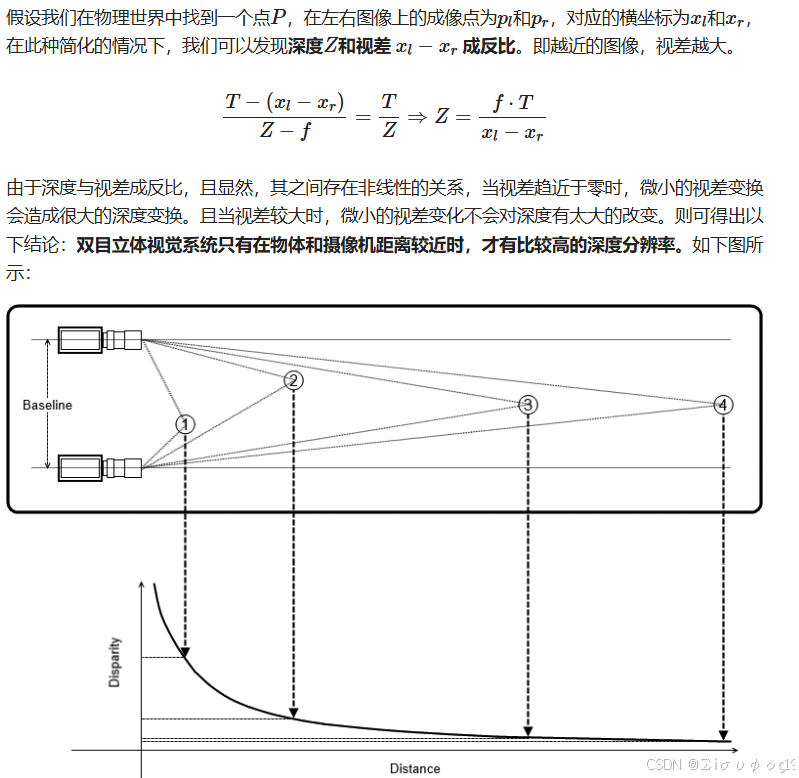
其中d定义为左右图的横坐标之差,称为视差。根据视差,我们可以估计一个像素与相机之间的距离。视差与距离成反比:视差越大,距离越近。同时,由于视差最小为一个像素,于是双目的深度存在一个理论上的最大值,由fb确定。我们看到,基线越长,双目能测到的最大距离就越远;反之,小型双目器件则只能测量很近的距离。相似地,我们人眼在看非常远的物体时(如
很远的飞机),通常不能准确判断它的距离。虽然由视差计算深度的公式很简洁,但视差d本身的计算却比较困难。我们需要确切地知道左眼图像的某个像素出现在右眼图像的哪一个位置(即对应关系),这件事也属于“人类觉得容易而计算机觉得困难”的任务。当我们想计算每个像素的深度时,其计算量与精度都将成为问题而且只有在图像纹理变化丰富的地方才能计算视差。由于计算量的原因,双目深度估计仍需要使用GPUFPG来实时计算
04-双目相机生成点云 - 黑马机器人 | 相机标定&物体检测



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









