







 本文档详细介绍了如何通过ROS来控制Gen3机器人。首先,配置PC与Gen3的有线或Wi-Fi连接,包括设置IP地址和通过Web app进行验证。接着,安装protobuf-3.5.1.1文件并编译。然后,编译ros_kortex功能包,处理编译过程中的依赖问题。最后,启动ROS节点并运行示例程序以实现机器人运动控制。
本文档详细介绍了如何通过ROS来控制Gen3机器人。首先,配置PC与Gen3的有线或Wi-Fi连接,包括设置IP地址和通过Web app进行验证。接着,安装protobuf-3.5.1.1文件并编译。然后,编译ros_kortex功能包,处理编译过程中的依赖问题。最后,启动ROS节点并运行示例程序以实现机器人运动控制。
一、配置PC与Gen3连接
1.有线连接
1.控制面板->网络和internet->网络共享中心->更改适配器设置->以太网“右击”->属性->(TCP/IPv4)->属性->设置IP192.168.1.11;子网掩码255.255.255.0
2.浏览器中输入机器人IP地址192.168.1.10打开web app
3.输入用户名与密码admin admin
2.wi-fi连接
1.完成有线连接
2.登录web app
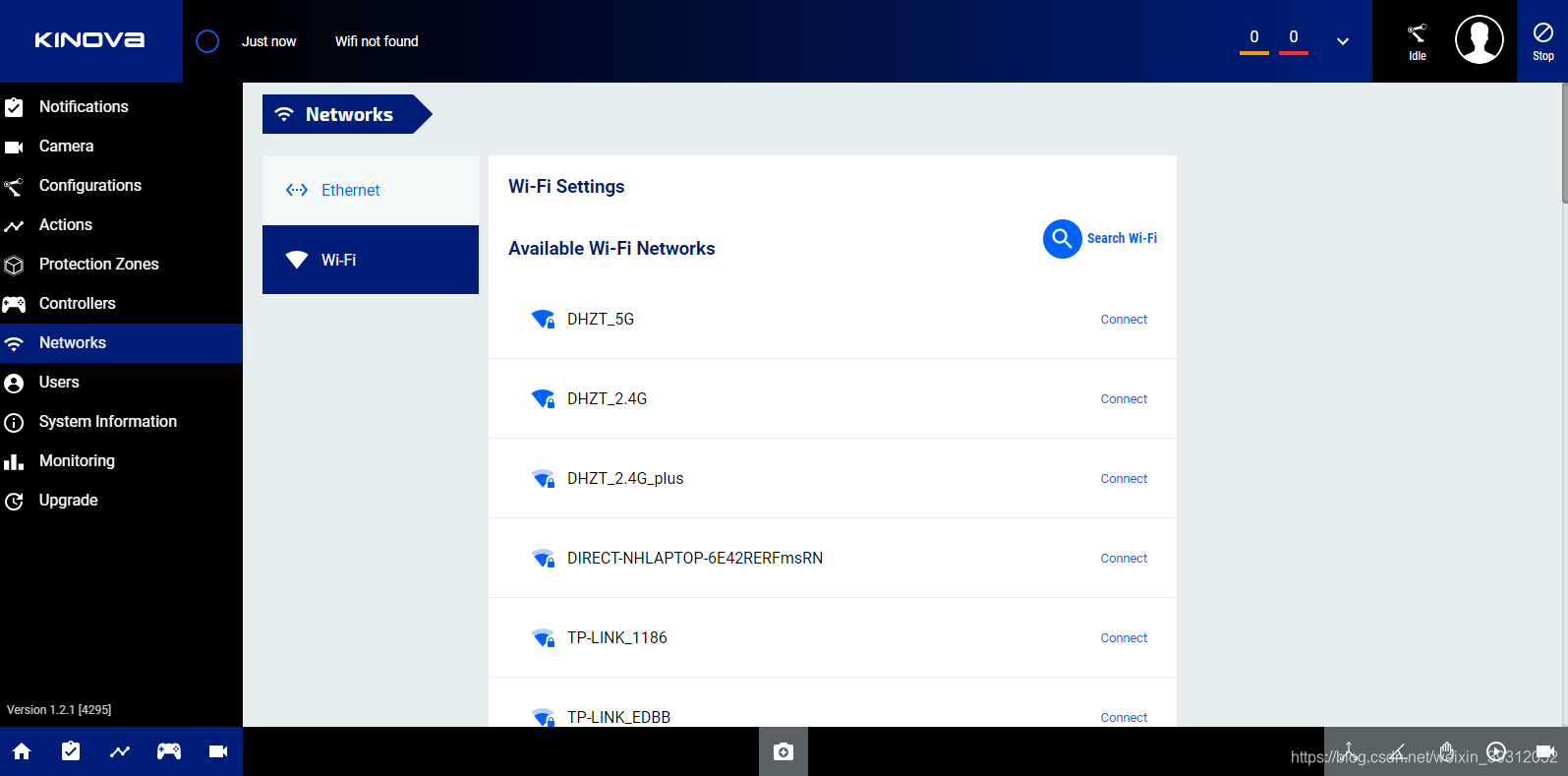
3.连接其中一个局域网,输入密码,将机器人连接到局域网内,记录分配的IP地址
4.在任何连接到同一Wi-Fi网络的无线设备上,打开Web浏览器,输入机器人在步骤5中获得的IP地址
5.在登录屏幕上,输入适当的用户名和密码,然后单击CONNECT按钮.
二、安装protobuf-3.5.1.1文件
1、下载protobuf-3.5.1.1文件:
git clone https://github.com/protocolbuffers/protobuf --branch 3.5.1.1
也可以直接从网站上下载,链接https://github.com/protocolbuffers/protobuf;注意版本信息,文件下载之后因为不需要编译,所以不要放在工作空间src下面,编译过程中,会出现错误,属于正常现象。
2、编译此文件
打开文件夹protobuf-3.5.1.1,右击打开新终端
$sudo apt-get install auto 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 2261
2261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









