







数据集:KITTI
代码框架:MMDetection3D/OpenPCDet
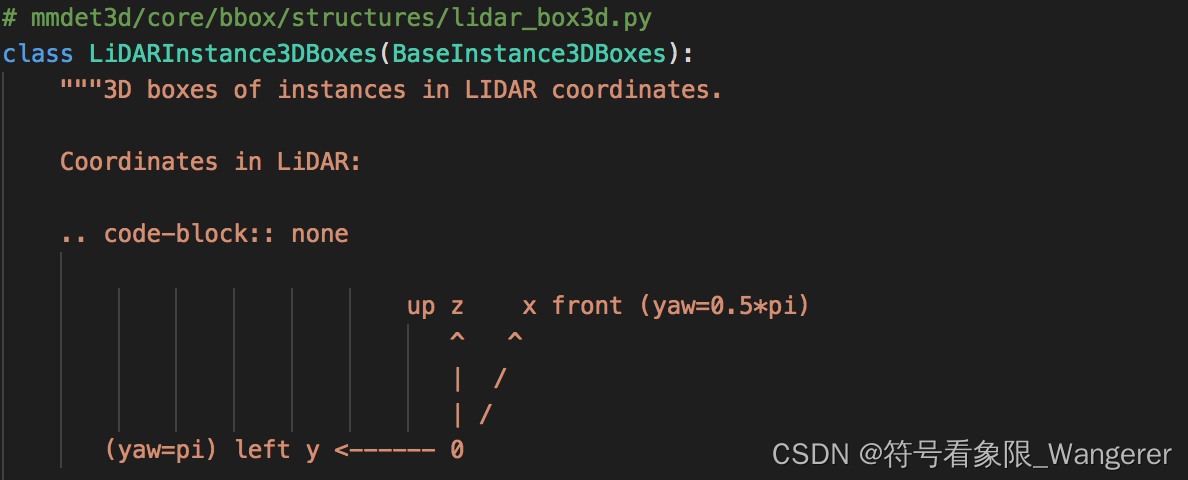
坐标系说明
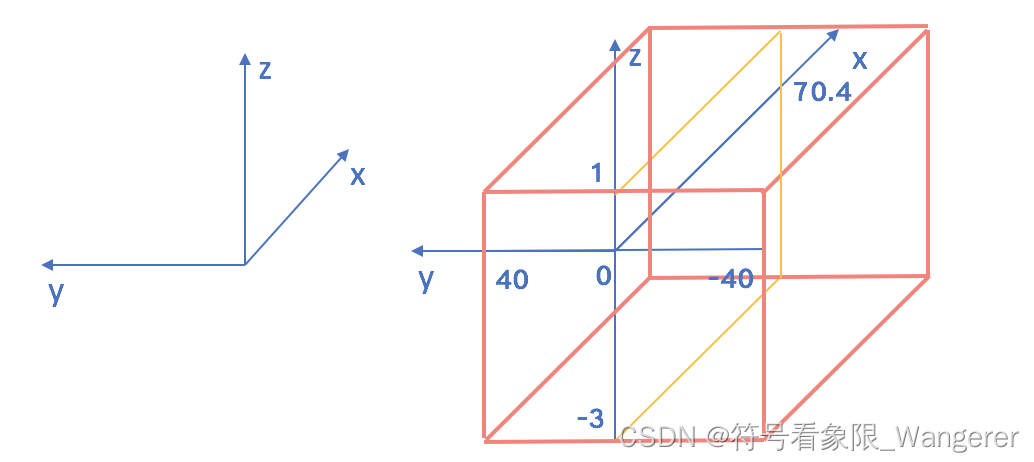
一、点云在雷达坐标系的坐标(单位是米)
点云初始数据的坐标。以KITTI数据集为例,点云范围是[0, 70.4], [-40, 40], [-3, 1],对应xyz。
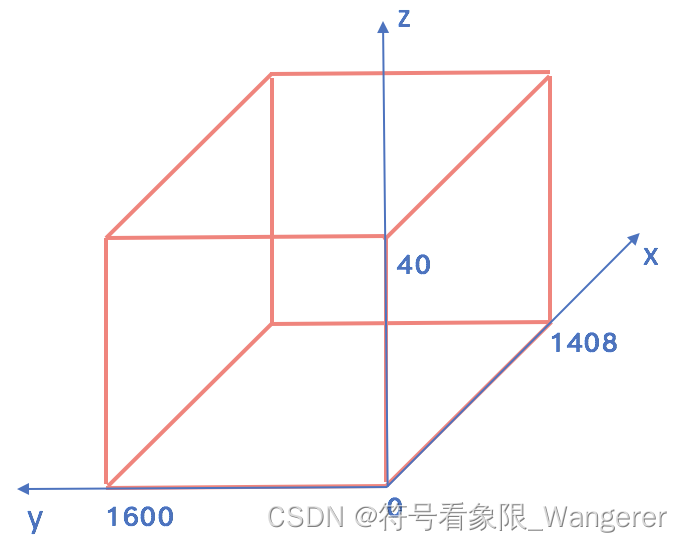
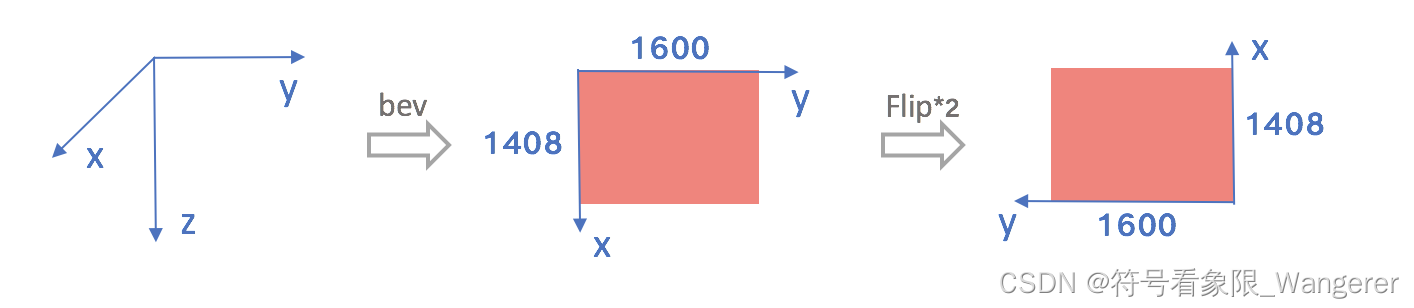
二、体素化后的体素坐标
单个体素尺寸 [0.05, 0.05, 0.1],体素坐标范围是[1408, 1600, 80],对应whl。
三、Anchor的拉平顺序
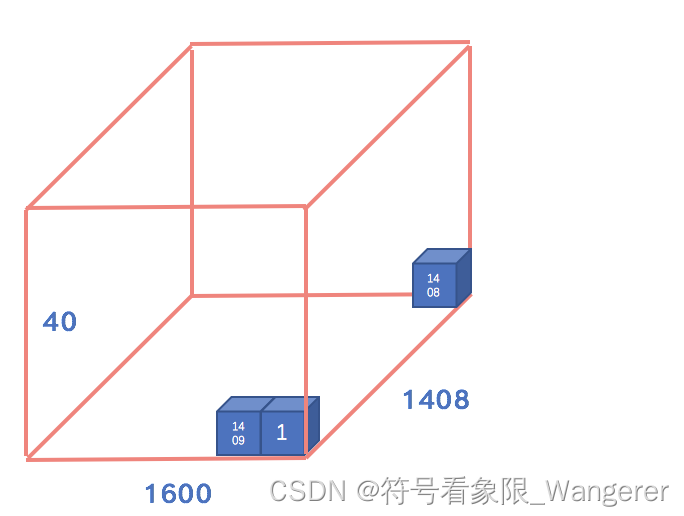
indices = z * 1600 * 1408 + y * 1408 + x
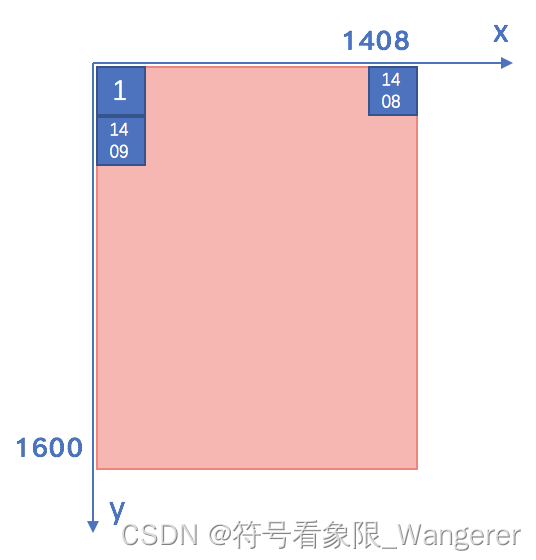
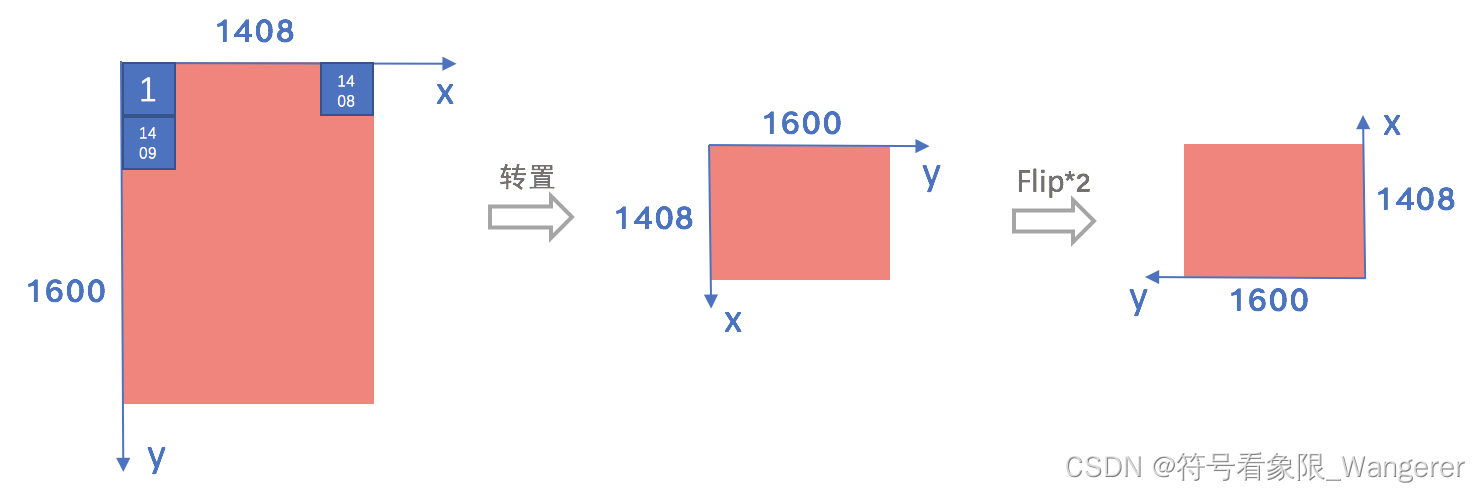
四、预测层向量Reshape后的鸟瞰图
features = preds.reshape(BS, L, H, W)
# L=40, H=1600, W=1408
五、BBox坐标
与点云坐标系的方向一致。
可视化操作
一、绘制BEV点云图
以左上角为顶点来绘制比较顺手。只是绘制好之后,需要经过两次Flip操作,使坐标系对齐。
二、绘制预测层向量Reshape后的鸟瞰图
先进行转置操作,再进行两次Flip操作。
(一般都是先转置,与BEV点云图合并后再一起进行两次Flip操作)
三、绘制BBox
直接绘制即可,此时坐标系已经与BBox一致。
可视化时,为了与点云图对齐,需要进行两次flip操作。
上述出现Flip的原因,总结而言就是我绘制点云的坐标系和实际点云坐标系(BBox坐标系)不一致导致的。

















 1293
1293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









