



世界坐标系:是为了描述相机的位置而被引入的
相机坐标系:
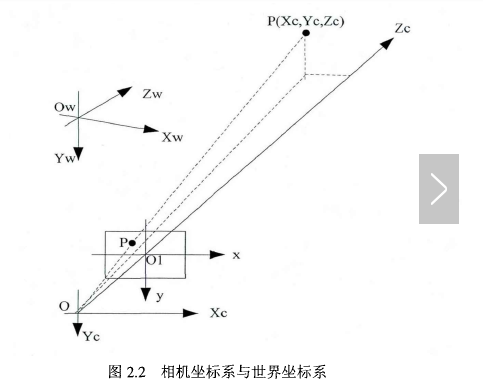
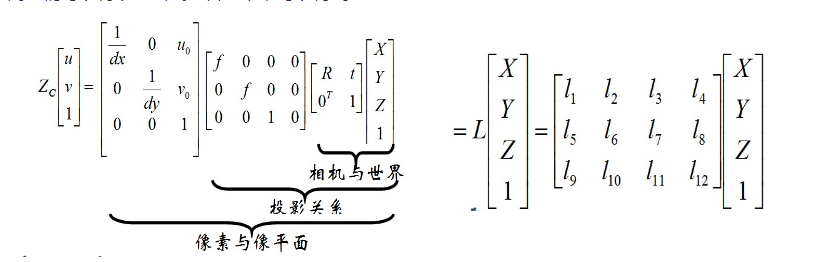
整个转换过程:世界坐标系中点经过R,T到相机坐标系,经过投影关系到像素坐标系,像素坐标系再转换到像屏幕坐标系,这样就是我们看到的二维图像上的坐标位置了。
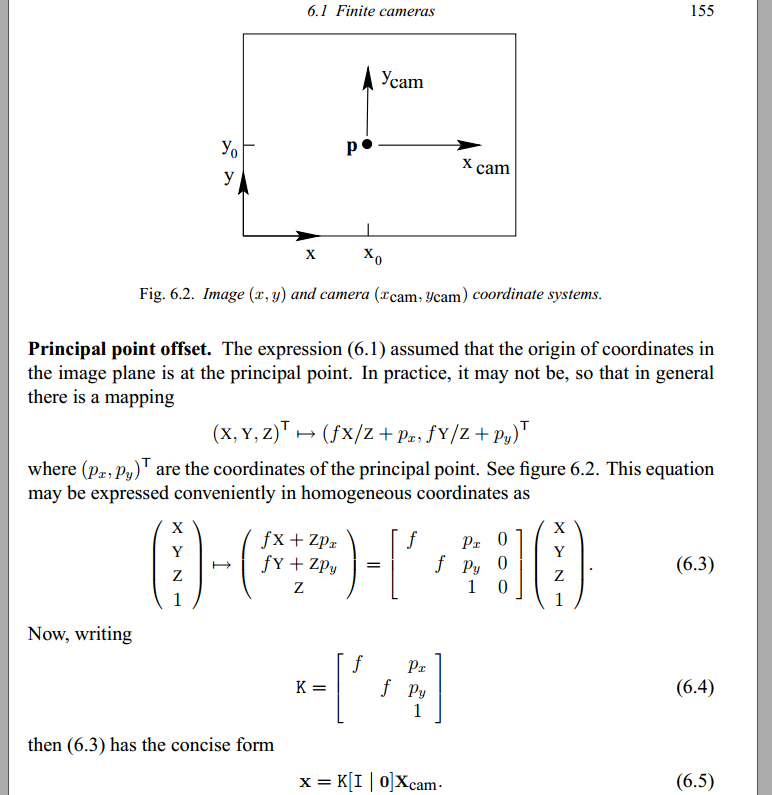
相机的内参数,dx,dy,u0,v0,that(最后,由于相机制造工艺的误差,相机的成像坐标系的夹角可能并不是90度)
相机的外参数,R,T
图像坐标到相机坐标系
可以参考的博客:http://blog.youkuaiyun.com/yangdashi888/article/details/51356385

















 6615
6615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









