







转载https://www.cswamp.com/post/121
Ceres扫描匹配器优化包含了三个残差项:点云与grid的匹配残差、位置(平移)残差、角度(旋转)残差。位置、角度两残差顶多就是对匹配位姿的约束,防止点云匹配的结果和初值差太多,真正的扫描匹配的主角是点云匹配残差。
1、CeresScanMatcher2D::Match
Match执行ceres扫描匹配,CeresScanMatcher2D其它成员都是它的辅助函数。
void CeresScanMatcher2D::Match(const Eigen::Vector2d& target_translation,
const transform::Rigid2d& initial_pose_estimate,
const sensor::PointCloud& point_cloud,
const Grid2D& grid,
transform::Rigid2d* const pose_estimate,
ceres::Solver::Summary* const summary) const {
target_translation:odom坐标系下欲优化的local_pose中的平移部分。不受是否使用相关性扫描影响。
initial_pose_estimate:来自odom坐标系下欲优化local_pose。如果没使用相关性扫描,值就是local_pose,否则是相关性扫描找出的位姿。
grid:概率图。
point_cloud:经过重力修正后机器人(base_footprint)坐标系下的点云。就是LocalTrajectoryBuilder2D中的filtered_gravity_aligned_point_cloud。
double ceres_pose_estimate[3] = {initial_pose_estimate.translation().x(),
initial_pose_estimate.translation().y(),
initial_pose_estimate.rotation().angle()};
ceres::Problem problem;
CHECK_GT(options_.occupied_space_weight(), 0.);
switch (grid.GetGridType()) {
case GridType::PROBABILITY_GRID:
problem.AddResidualBlock(
CreateOccupiedSpaceCostFunction2D(
options_.occupied_space_weight() /
std::sqrt(static_cast(point_cloud.size())),
point_cloud, grid),
nullptr /* loss function */, ceres_pose_estimate);
点云匹配残差块。栅格图类型默认使用概率图,launcher用的也是概率图
break;
case GridType::TSDF:
problem.AddResidualBlock(
CreateTSDFMatchCostFunction2D(
options_.occupied_space_weight() /
std::sqrt(static_cast(point_cloud.size())),
point_cloud, static_cast(grid)),
nullptr /* loss function */, ceres_pose_estimate);
break;
}
CHECK_GT(options_.translation_weight(), 0.);
problem.AddResidualBlock(
TranslationDeltaCostFunctor2D::CreateAutoDiffCostFunction(
options_.translation_weight(), target_translation),
nullptr /* loss function */, ceres_pose_estimate);
平移残差块。
CHECK_GT(options_.rotation_weight(), 0.);
problem.AddResidualBlock(
RotationDeltaCostFunctor2D::CreateAutoDiffCostFunction(
options_.rotation_weight(), ceres_pose_estimate[2]),
nullptr /* loss function */, ceres_pose_estimate);
旋转残差块。
ceres::Solve(ceres_solver_options_, &problem, summary);
*pose_estimate = transform::Rigid2d(
{ceres_pose_estimate[0], ceres_pose_estimate[1]}, ceres_pose_estimate[2]);
}
CSM2D优化包含了三个残差:点云与grid的匹配残差、位置(平移)残差、角度(旋转)残差。其中,每种残差都有一个权重配置参数。
对于优化结果添加位置偏差量和角度偏差量的限定,我个人理解,通过位姿外推器算出的位姿基本上就在真值附近,如果优化后的结果出现了较大的偏差说明位姿跟丢了。位置、角度两残差项顶多就是对匹配位姿的约束,防止点云匹配的结果和初值差太多,真正的扫描匹配的主角是点云匹配残差,即OccupiedSpaceCostFunction2D。
2、点云匹配残差块:OccupiedSpaceCostFunction2D
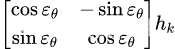
点云匹配的目的就是在地图中找到一个位姿估计,使得在该位姿下所有hit点在grid(概率图)中的占据概率之和最大。记H={h_1,. . . h_k,. . .h_K}感器扫描到的K个hit点集合,h_k是第k个hit点在机器人坐标系(base_footprint)下的位置坐标。那么h_k在odom坐标系下的坐标可以表示为:
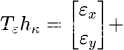
其中, 表示位姿估计,
表示位姿估计, 、
、 分别是机器人在odom坐标系下的坐标,
分别是机器人在odom坐标系下的坐标, 是机器人的方向角。用
是机器人的方向角。用 表示位姿估计描述的坐标变换。我们根据hit点在odom坐标系下的位置坐标查找对应的占据概率,但由于栅格坐标相对来说是一个比较稀疏离散的采样,所以Cartographer在它的基础上进行了一次双三次(bicubic)插值
表示位姿估计描述的坐标变换。我们根据hit点在odom坐标系下的位置坐标查找对应的占据概率,但由于栅格坐标相对来说是一个比较稀疏离散的采样,所以Cartographer在它的基础上进行了一次双三次(bicubic)插值 。因此优化的目标就是:
。因此优化的目标就是:
公式3: 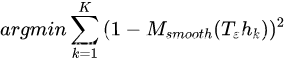
2.1 CreateOccupiedSpaceCostFunction2D
ceres::CostFunction* CreateOccupiedSpaceCostFunction2D(
const double scaling_factor, const sensor::PointCloud& point_cloud,
const Grid2D& grid) {
return new ceres::AutoDiffCostFunction<OccupiedSpaceCostFunction2D,
ceres::DYNAMIC /* residuals */,
3 /* pose variables */>(
new OccupiedSpaceCostFunction2D(scaling_factor, point_cloud, grid),
point_cloud.size());
}
class OccupiedSpaceCostFunction2D {
public:
OccupiedSpaceCostFunction2D(const double scaling_factor,
const sensor::PointCloud& point_cloud,
const Grid2D& grid)
: scaling_factor_(scaling_factor),
point_cloud_(point_cloud),
grid_(grid) {}
template <typename T>
bool operator()(const T* const pose, T* residual) const {
Eigen::Matrix<T, 2, 1> translation(pose[0], pose[1]);
Eigen::Rotation2D<T> rotation(pose[2]);
Eigen::Matrix<T, 2, 2> rotation_matrix = rotation.toRotationMatrix();
Eigen::Matrix<T, 3, 3> transform;
transform << rotation_matrix, translation, T(0.), T(0.), T(1.);
在函数的一开始,先把迭代的输入参数pose转换为坐标变换,存储在临时变量transform。然后使用Ceres库原生提供的双三次插值迭代器。
const GridArrayAdapter adapter(grid_);
ceres::BiCubicInterpolator<GridArrayAdapter> interpolator(adapter);
const MapLimits& limits = grid_.limits();
for (size_t i = 0; i < point_cloud_.size(); ++i) {
// Note that this is a 2D point. The third component is a scaling factor.
const Eigen::Matrix<T, 3, 1> point((T(point_cloud_[i].position.x())),
(T(point_cloud_[i].position.y())),
T(1.));
const Eigen::Matrix<T, 3, 1> world = transform * point;
interpolator.Evaluate(
(limits.max().x() - world[0]) / limits.resolution() - 0.5 +
static_cast<double>(kPadding),
(limits.max().y() - world[1]) / limits.resolution() - 0.5 +
static_cast<double>(kPadding),
&residual[i]);
residual[i] = scaling_factor_ * residual[i];
根据公式(3)针对每个hit点计算对应的残差代价。在“transform * point”,通过hit点坐标(base_footprint坐标系)与transform的相乘得到其在odom坐标系下的坐标  。
。
interpolator.Evaluate行则通过刚刚构建的迭代器和hit点在odom坐标系的米格式坐标world,获取在hit点是占据的概率。该函数调用有三个参数,前两个参数用来描述world点在概率图的index格式坐标,第三个参数用于记录插值后的结果。计算时是通过GridArrayAdapter类中成员函数GetValue获取附近几个栅格数据,然后求它们双三次插值后的值。此外由于栅格中原本存储的就是栅格空闲的概率,所以这里查询出来的概率就是 。
。
residual[i]是何值?——举个例子,point_cloud_[i]点的坐标不在概率图内(实际不可能发生,这里只为说residual[i]值),而且BiCubicInterpolator在计算“均值”时,邻近点的坐标也不在概率图内,根据GridArrayAdapter::GetValue行为,不在概率图内的都返回kMaxCorrespondenceCost(0.9)。那BiCubicInterpolator计算出的“均值”也会是0.9,进而由此得到的residula[i]值也是0.9。residual[i]表示的是在point_cloud_[i]这个栅格上空闲概率。
如何求world点在概率图的Index格式坐标?——MapLimits::GetCellIndex(const Eigen::Vector2f& point)用于把某个米格式坐标转换成Index格式坐标,内中像计算x的方法是common::RoundToInt((max_.x() - point.x()) / resolution_ - 0.5)。这里计算方法类似那里,只是改了两点。1)因为双三次插值须要Index是浮点值,去掉那里的RoundToInt,也正是这原因,不能直接调用limits.GetCellIndex()。2)加了一个固定值kPadding(INT_MAX / 4=536870911)。
}
return true;
}
private:
static constexpr int kPadding = INT_MAX / 4;
class GridArrayAdapter {
public:
enum { DATA_DIMENSION = 1 };
explicit GridArrayAdapter(const Grid2D& grid) : grid_(grid) {}
void GetValue(const int row, const int column, double* const value) const {
if (row < kPadding || column < kPadding || row >= NumRows() - kPadding ||
column >= NumCols() - kPadding) {
*value = kMaxCorrespondenceCost;
} else {
*value = static_cast(grid_.GetCorrespondenceCost(
Eigen::Array2i(column - kPadding, row - kPadding)));
}
}
3、2D平移残差块:TranslationDeltaCostFunctor2D
// Computes the cost of translating 'pose' to 'target_translation'.
// Cost increases with the solution's distance from 'target_translation'.
class TranslationDeltaCostFunctor2D {
public:
static ceres::CostFunction* CreateAutoDiffCostFunction(
const double scaling_factor, const Eigen::Vector2d& target_translation) {
return new ceres::AutoDiffCostFunction<TranslationDeltaCostFunctor2D,
2 /* residuals */,
3 /* pose variables */>(
new TranslationDeltaCostFunctor2D(scaling_factor, target_translation));
}
template
bool operator()(const T* const pose, T* residual) const {
residual[0] = scaling_factor_ * (pose[0] - x_);
residual[1] = scaling_factor_ * (pose[1] - y_);
残差等于当前平移减去初始平移。残差越大,意味着距离初始位姿越远了。对认为不会和初始偏离太远的场景,越大意味着是真正值的可能性越低。
return true;
}
private:
// Constructs a new TranslationDeltaCostFunctor2D from the given
// 'target_translation' (x, y).
explicit TranslationDeltaCostFunctor2D(
const double scaling_factor, const Eigen::Vector2d& target_translation)
: scaling_factor_(scaling_factor),
x_(target_translation.x()),
y_(target_translation.y()) {}
TranslationDeltaCostFunctor2D(const TranslationDeltaCostFunctor2D&) = delete;
TranslationDeltaCostFunctor2D& operator=(
const TranslationDeltaCostFunctor2D&) = delete;
const double scaling_factor_;
const double x_;
const double y_;
};
4、2D旋转残差块:RotationDeltaCostFunctor2D
// Computes the cost of rotating 'pose' to 'target_angle'. Cost increases with
// the solution's distance from 'target_angle'.
class RotationDeltaCostFunctor2D {
public:
static ceres::CostFunction* CreateAutoDiffCostFunction(
const double scaling_factor, const double target_angle) {
return new ceres::AutoDiffCostFunction<
RotationDeltaCostFunctor2D, 1 /* residuals */, 3 /* pose variables */>(
new RotationDeltaCostFunctor2D(scaling_factor, target_angle));
}
template <typename T>
bool operator()(const T* const pose, T* residual) const {
residual[0] = scaling_factor_ * (pose[2] - angle_);
残差等于当前角度减去初始角度。残差越大,意味着距离初始位姿越远了。对认为不会和初始偏离太远的场景,越大意味着是真正值的可能性越低。
return true;
}
private:
explicit RotationDeltaCostFunctor2D(const double scaling_factor,
const double target_angle)
: scaling_factor_(scaling_factor), angle_(target_angle) {}
RotationDeltaCostFunctor2D(const RotationDeltaCostFunctor2D&) = delete;
RotationDeltaCostFunctor2D& operator=(const RotationDeltaCostFunctor2D&) =
delete;
const double scaling_factor_;
const double angle_;
};

















 1167
1167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









