







 超级会员免费看
超级会员免费看
 这篇博客介绍了雷达点迹处理的概念,包括点迹定义、雷达信号的点迹输入输出、点迹算法如点迹合并和过滤,以及点迹速度解算。点迹预处理旨在提高信号质量,通过点迹合并解决目标分裂问题,点迹过滤则用于区分运动、固定、孤立和可疑点迹。还探讨了点迹航迹软件设计流程和MATLAB仿真的应用。
这篇博客介绍了雷达点迹处理的概念,包括点迹定义、雷达信号的点迹输入输出、点迹算法如点迹合并和过滤,以及点迹速度解算。点迹预处理旨在提高信号质量,通过点迹合并解决目标分裂问题,点迹过滤则用于区分运动、固定、孤立和可疑点迹。还探讨了点迹航迹软件设计流程和MATLAB仿真的应用。
1,点迹定义:
假设研究对象为位置x和速度v,预测值是根据这一时刻的x值、v值来预测下一时刻的x、v;测量值是根据传感器也就是雷达得到的,因为各种误差的存在,这两个值都不准确,所以把他们加权融合,得到一个新的量—状态值。点迹就是所谓的测量值,由雷达对同一个目标探测到的一系列点(假设目标静止,但由于误差的存在,会扫描出不止一个点),航迹对应状态值,是点迹和预测轨迹的加权融合。
2,雷达信号的点迹输入输出:
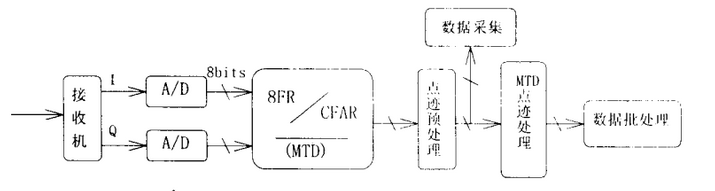
点迹预处理算法的输入数据包括:
(1)和通道的CFAR检测结果;
(2)提取的波门内检测单元检测距离及多普勒序号
点迹预处理算法的输出数据是:提取后的点迹数据
3,点迹的算法:
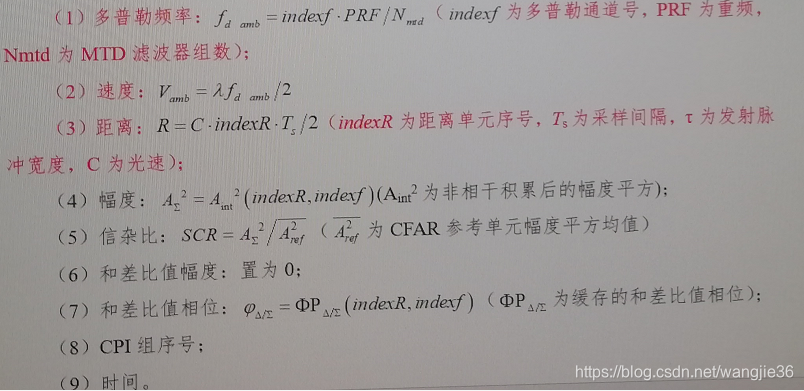
对于CFAR检测过门限的极值点,需要将非相参积累前的各帧中相应单元的点迹全部提取,提取的原始点迹信息包括:
点迹数据的预处理:在生成航迹处理之前,一般需要对点迹进行预处理,以提高信号的质量,主要包括点迹合并和点迹过滤。
(1)点迹合并

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











