







 超级会员免费看
超级会员免费看
还在为点云处理的效率瓶颈和功能限制发愁吗?面对点云处理个性需求,是否让你感到束手束脚?调试困难、性能受限、定制化需求难以满足...
本次分享将带你深入核心,走进点云深处,揭秘如何直接运用C++进行CloudCompare & PCL的原生集成开发。掌握核心步骤,规避常见陷阱,并附实用开发示例源码。
助你:
效率飙升:直达底层,性能最大化!
灵活无限: 自由定制算法流程,深度集成业务逻辑!
掌控全局:彻底理解框架机制,调试维护更轻松!
一、干货 | 核心开发步骤1. UI 设计:使用 QT Designer 设计功能菜单,编译生成 UI 头文件。2. 函数声明:在 `mainwindow.h` 中声明自定义的功能函数。3. 信号槽绑定:在 `mainwindow.cpp` 中,利用 Qt 信号与槽机制,将菜单项动作与功能函数关联。4. 功能实现:在 `mainwindow.cpp` 中编写功能函数的具体实现代码,并包含必要的 PCL/CloudCompare 头文件。
二、示例 | 以风电塔筒点云自动切片为例
1.UI 设计:使用 QT Designer 设计功能菜单,编译生成 UI 头文件。
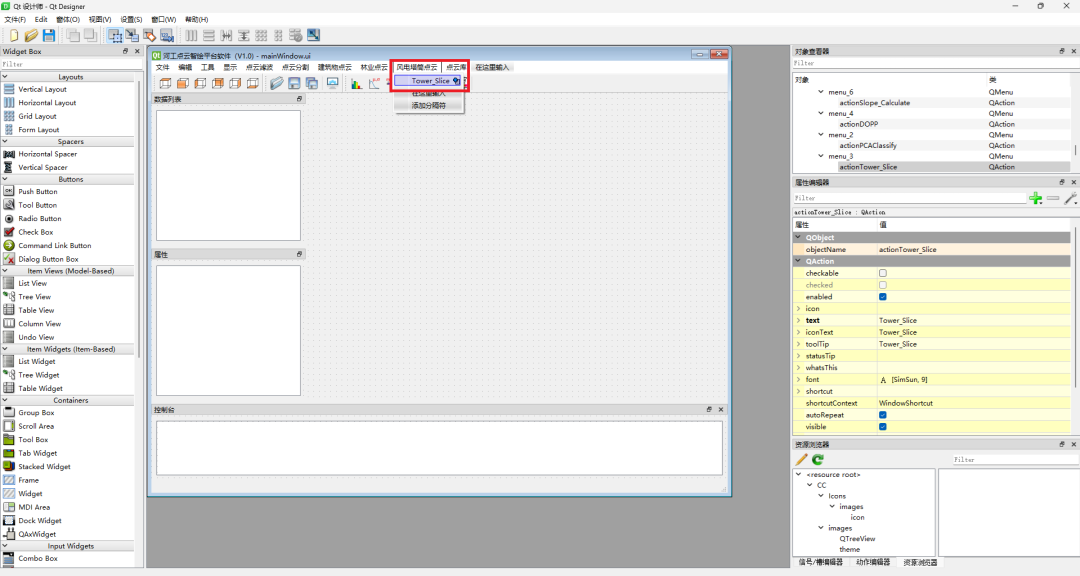
2.函数声

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 4527
4527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









