







 本文详细介绍了如何在树莓派armv7架构上,使用wsl环境和linaro交叉编译工具链,对DJI OSDK 4.x进行交叉编译。内容包括修改osdk-core的CMakeLists.txt,配置arm-linux-gnueabihf编译器,以及编译应用程序。同时,针对M200系列和M300的硬件连接问题,提供了转接板直连和使用开发套件的方案,解释了OSDK最新接口定义。
本文详细介绍了如何在树莓派armv7架构上,使用wsl环境和linaro交叉编译工具链,对DJI OSDK 4.x进行交叉编译。内容包括修改osdk-core的CMakeLists.txt,配置arm-linux-gnueabihf编译器,以及编译应用程序。同时,针对M200系列和M300的硬件连接问题,提供了转接板直连和使用开发套件的方案,解释了OSDK最新接口定义。
文章目录
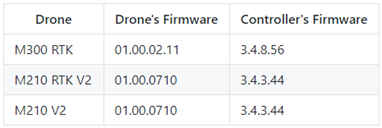
今年5月发布了M300 RTK,相应OSDK发布了v 4.x版本以支持新机型。
OSDK相对有些变动,前面博客中使用的代码不能直接使用,并且 osdk-core中默认添加了预编译的libdji-linker.a静态库,并且跨平台的hal、osal独立到用户代码部分。最新版本OSDK v4.0.1上的开发需要做一些改变。
本章演示中,目标机仍然使用树莓派armv7的架构,宿主机为wsl。注意最后一节的硬件说明,M200系列飞机有无人机扩展通道,可以直接使用;M300仅在使用开发套件测试通过 (直接连接亦测试通过)。
1、交叉编译核心库
我们在用以往的配置项进行编译时,会提示有关hard-float、硬浮点、FPU等错误。在armv7架构上,DJI提供的预编译的静态库使用是arm-linux-gnueabihf编译器。因此,我们在交叉编译使,需要使用匹配的交叉编译器。
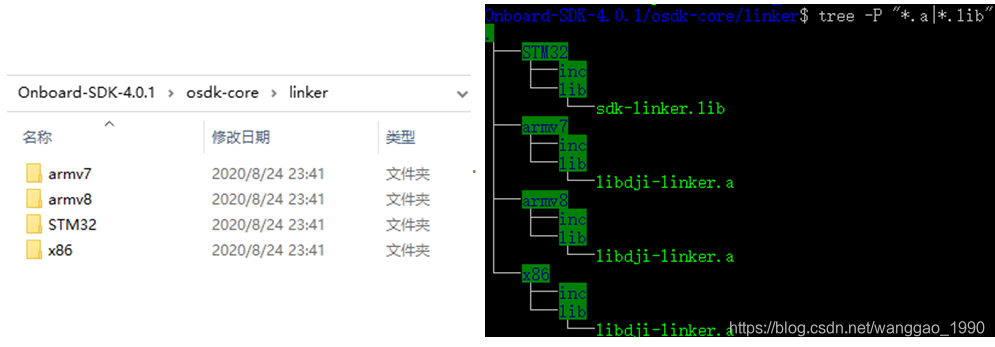
在前面,我们已经准备好linaro提供的各版本交叉编译工具,并集中放在目录下。
我们在后续使用中,选择arm-li

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1230
1230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











