



摘 要
随着自行车作为绿色出行工具的普及,骑行安全成为了人们日益关注的问题。尤其是在城市交通中,自行车骑行者常常面临高速度行驶带来的安全隐患。为了提升骑行者的安全性,设计一种车速报警系统成为了研究的重点。本文基于STM32单片机设计并实现了一种自行车车速报警系统。该系统通过传感器采集自行车的速度信息,并通过OLED显示屏实时显示当前车速。当车速超过50km/h时,蜂鸣器会自动发出报警提示,以提高骑行安全性。系统配备了三个按键,其中按键1用于加速,按键2用于减速,按键4用于开关控制。通过按键输入,用户可以方便地调节车速,同时系统会根据霍尔测速信号对车速进行监测并进行超限报警。在设计中,STM32单片机完成硬件通信初始化、传感器信号采集、显示输出和控制逻辑的实现,确保了系统的高效运作。整体方案的实现提高了骑行过程中的安全性,并增强了用户对车速的实时掌控能力。
ABSTRACT
With the popularization of bicycles as a green means of transportation, riding safety has become an increasingly concerned issue for people. Especially in urban transportation, cyclists often face safety hazards caused by high-speed driving. In order to improve the safety of cyclists, designing a speed warning system has become a research focus. This article designs and implements a bicycle speed alarm system based on STM32 microcontroller. The system collects bicycle speed information through sensors and displays the current speed in real time on an OLED screen. When the vehicle speed exceeds 50km/h, the buzzer will automatically sound an alarm to improve riding safety. The system is equipped with three buttons, with button 1 for acceleration, button 2 for deceleration, and button 4 for on/off control. Through button input, users can easily adjust the vehicle speed, and the system will monitor the vehicle speed based on the Hall speed signal and issue an over limit alarm. In the design, the STM32 microcontroller completes hardware communication initialization, sensor signal acquisition, display output, and control logic implementation, ensuring the efficient operation of the system. The implementation of the overall plan has improved the safety during cycling and enhanced users' real-time control over vehicle speed.
Keywords: STM32 microcontroller; Bicycle speed alarm; OLED display screen
目 录
1 绪论
随着城市化进程的加快,交通问题成为现代社会发展的重要议题。在这个背景下,绿色出行工具,如自行车,逐渐成为人们日常出行的重要选择。自行车不仅能够缓解交通压力,还具备环保、经济等诸多优势。然而,随着骑行速度的增加,自行车骑行者面临的安全风险也日益增大。特别是在城市快速骑行中,过快的车速可能导致骑行者无法及时应对突发情况,从而引发交通事故[1]。因此,设计一种有效的车速报警系统,帮助骑行者及时了解车速并作出相应调整,成为保障骑行安全的重要手段。
本研究基于STM32单片机设计并实现了一种自行车车速报警系统。该系统通过霍尔传感器采集自行车的车速信息,实时显示在OLED屏幕上。当车速超过设定阈值时,蜂鸣器会自动发出警报,提醒骑行者减速。系统还配备了多个按键,用户可以通过按键加速、减速或开关系统,操作简便,功能实用[2]。通过采用STM32单片机作为核心控制单元,系统能够高效地处理传感器信号、控制报警装置并实时更新显示内容,确保系统稳定可靠运行。
1.1 研究背景
近年来,随着人们对健康和环保意识的提升,骑行作为一种低碳、环保的出行方式,得到了广泛的推广与应用。然而,城市道路的交通复杂性和骑行速度的不断提高,使得骑行安全成为一大隐患。尤其是在没有车速监控的情况下,骑行者容易忽视速度带来的安全风险。因此,开发一款车速报警系统,能够实时监测骑行者的车速并进行超速报警,显得尤为重要[3]。
单片机技术作为一种广泛应用于嵌入式系统的控制技术,在智能硬件中得到了广泛应用。STM32单片机具备强大的处理能力、丰富的外设接口以及低功耗等特点,适合用于开发嵌入式车速监控系统。通过集成霍尔传感器、OLED显示屏、蜂鸣器等硬件,STM32单片机能够实时采集车速数据、显示车速信息,并在必要时发出警报,有效提高骑行者的安全意识。
1.2 国内外研究现状及发展趋势
1.2.1国内研究现状
在国内,随着自行车作为环保出行工具的日益普及,车速监测和报警系统的研究逐渐得到重视。许多研究集中在通过传感器监测车速,并结合微控制器(如STM32、Arduino)进行实时数据处理和显示[4]。传统的自行车车速报警系统多采用霍尔传感器测量车轮转速,然后通过LCD或OLED显示屏实时显示车速信息。当车速超过设定阈值时,系统通过蜂鸣器、LED指示灯等方式提醒骑行者减速。虽然国内的一些产品和系统已经具备了基本的车速监控和报警功能,但大多数系统的智能化程度仍较低,往往缺乏环境感知和智能调整能力。此外,系统的稳定性和准确性也存在一定问题,特别是在复杂的骑行环境下,传感器可能受到外界干扰,导致数据偏差。总体来说,国内在该领域的研究还处于初步阶段,未来有很大的发展空间。
1.2.2国外研究现状
与国内相比,国外在自行车车速报警系统的研究和应用上起步较早,并且已经取得了较为成熟的成果。国外的研究不仅注重车速的精确监测,还结合了更多先进的技术,如GPS模块、加速度传感器、激光雷达等高精度传感器,以提高车速数据的准确性和可靠性[5]。同时,国外的一些研究更强调系统的智能化和个性化应用,车速报警不仅仅局限于超速提示,还结合环境因素(如天气、道路状况、交通流量等)来动态调整报警阈值,提供更加安全的骑行体验。智能手机与自行车车速监测系统的连接,进一步拓展了系统的功能,使骑行者能够通过APP实时查看车速、获取骑行数据分析和个性化建议。此外,国外一些高端智能自行车系统集成了健康监测功能,根据骑行者的健康数据提供运动建议,并通过算法分析优化骑行体验。总体来说,国外在自行车车速报警系统的技术研究与市场应用上较为成熟,并且在系统集成化、多功能性和智能化方面处于领先地位。
1.2.3发展趋势
未来,自行车车速报警系统将朝着更加智能化、精准化和个性化的方向发展。随着传感器技术的不断进步,未来的系统将不仅依赖单一的车速监测传感器,而是采用多种传感器组合(如激光雷达、超声波、红外线等)来提高监测精度,克服传统传感器易受环境干扰的问题。同时,系统将更加注重智能化,与智能手机、可穿戴设备等智能硬件的结合,将使得系统能够提供更个性化的服务[6]。例如,系统可以根据用户的骑行历史、健康数据以及实时路况,自动调整车速报警阈值,并提供实时的骑行建议和安全提示。此外,未来的系统还将更加注重低功耗设计和长续航能力,确保系统在长时间使用中保持高效稳定。随着物联网技术的发展,车速报警系统也将与城市交通管理系统进行联动,提供实时交通信息和道路状况,使骑行者能够根据最新信息做出最优的骑行决策。智能化和个性化的车速报警系统将不仅提高骑行安全,还能有效优化骑行体验,推动智能出行技术的进一步发展。
1.3 研究意义及目的
1.3.1研究意义
随着城市化进程的加速,绿色出行已成为现代城市交通发展的重要趋势。自行车,作为一种便捷、环保且低成本的出行方式,逐渐受到越来越多人的青睐。然而,随着骑行速度的提高,骑行安全问题也愈发凸显,特别是在城市交通密集区,骑行者面临着较大的安全隐患[7]。因此,开发一种实时监测自行车车速并进行超速报警的系统,对提高骑行安全性具有重要意义。
基于单片机的自行车车速报警系统,能够通过传感器实时监测车速,并通过显示屏、蜂鸣器等方式提醒骑行者超速,帮助骑行者及时调整车速,避免交通事故的发生。该系统不仅能够实时反馈骑行速度,还能根据骑行者的需求提供加速或减速调节的功能。随着单片机技术的普及和传感器技术的进步,基于单片机的智能化车速监控系统具备了较高的性价比和实用价值。该研究在推动智能出行、提高交通安全方面具有广泛的应用前景,对提升公众安全骑行意识、减少交通事故具有现实意义。
1.3.2研究目的
本研究设计并实现了一个基于STM32单片机的自行车车速报警系统,实时采集车速数据并进行超速报警,帮助骑行者在城市道路和复杂环境中提高骑行安全性。系统通过OLED显示屏实时显示车速,当车速超过设定阈值时,蜂鸣器发出警报,提醒骑行者及时减速[8]。同时,系统采用低成本、高效、稳定的设计,并通过加速和减速按键实现用户对车速的调节。通过该系统的实现,研究提高了骑行者的安全意识,推动智能出行技术的发展,并为智能自行车及智能交通的进一步研究提供了技术参考。
1.4 本论文的主要结构
绪论:本部分介绍自行车车速报警系统的重要性和应用背景,并讨论为何选择单片机作为核心控制器。还可以探讨现有自行车车速监控系统的挑战和局限性,以及基于单片机的车速报警系统如何解决这些问题,提升骑行者的安全性。
系统概述:基于单片机的自行车车速报警系统主要包括以下几个核心组件:车速传感器、按键模块、OLED显示屏、蜂鸣器等。各个模块协同工作,实现车速的实时监控与超速报警。当车速超过设定阈值时,蜂鸣器会发出警报,提醒骑行者及时减速。
硬件设计:本部分详细介绍基于单片机的自行车车速报警系统的硬件组成和设计。系统的核心控制器是STM32单片机,车速传感器用于实时采集车速数据,OLED显示屏用于显示当前车速,蜂鸣器用于超速报警,按键模块提供加速、减速和开关控制。将对每个硬件组件的选择、配置和连接方式进行详细阐述。
软件设计:本部分将详细描述基于单片机的自行车车速报警系统的软件架构及其编程实现。系统的软件部分包括车速数据采集、车速显示、超速检测和报警逻辑的实现。通过软件优化和调试,确保系统的可靠性和实时性,保障车速报警功能的正常运行。
系统测试:介绍对基于单片机的自行车车速报警系统进行测试和验证的过程。在开发过程中,通过测试环境的选择、测试方法的设计以及测试数据的收集与分析,确保系统性能、稳定性和可靠性,及时发现并解决潜在问题。
结论与展望:总结论文的主要内容和研究成果,提出改进和优化的建议,以及对未来研究方向的展望。可以探讨该系统在智能交通、智能出行领域的潜在应用和市场前景,并提出进一步的研究与开发方向。
2 系统总体方案设计
本章节将针对基于单片机的自行车车速报警系统进行总体方案设计,并分析系统的需求,确定功能实现的核心方案。在前面的章节中,对自行车车速报警系统对于提高骑行安全性的必要性和意义,结合当前自行车骑行环境的需求,最终决定采用STM32单片机作为主控芯片。
2.1 自行车车速报警系统需求分析
随着城市化进程加快,自行车成为人们日常出行的重要工具,然而骑行速度的提高也带来了安全隐患,特别是在复杂的城市交通环境中。为了提升骑行安全性,设计一个实时监测车速并进行超速报警的系统显得尤为重要。该系统需具备实时车速监控功能,通过车速传感器精确采集数据,并通过显示屏实时显示。当车速超过设定阈值时,蜂鸣器会自动发出警报,提醒骑行者减速。系统还应提供简单的用户交互界面,允许用户通过按键进行加速、减速或开关控制。为了确保系统稳定性,硬件设计必须能够在多变的环境条件下稳定工作,并且具备低功耗特性以延长电池续航。此外,系统应具备较强的环境适应性和安全防护功能,以确保系统在复杂的骑行环境下正常运行,并且具备良好的扩展性和成本控制,满足大规模应用的需求。
2.2 系统功能
自行车车速报警系统的核心功能是实时监控骑行速度并在车速超过设定的阈值时进行报警。以下是该系统的一些主要功能和特点:
车速采集模块:系统通过霍尔传感器实时监测自行车的车速。霍尔传感器可以精确地捕捉车轮转动信息,将其转换为车速数据,并提供给系统进行处理和计算。
车速显示模块:使用OLED显示屏,实时显示当前的车速值以及用户设定的超速警报阈值。显示屏清晰展示所有关键车速信息,使骑行者可以随时监控自己的骑行状态。
超速报警模块:当车速超过用户设定的阈值(例如50km/h)时,系统通过蜂鸣器发出警报,提醒骑行者及时减速,避免由于过速引发的安全隐患。
加速与减速控制模块:系统配备加速和减速控制功能,骑行者可以通过按键1加速,按键2减速,按键4控制系统开关。用户可以根据需求灵活调整车速,确保安全骑行。系统原理框图如图2.1所示。
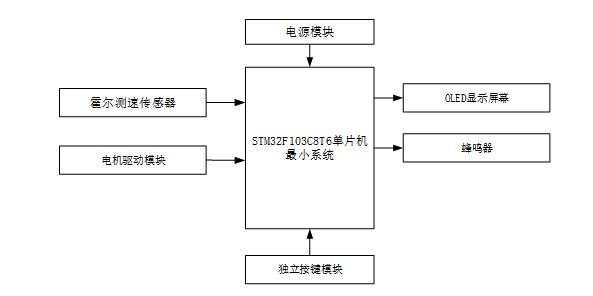
图2.1 系统原理框图
2.3 主要元器件选型
2.3.1 单片机型号选择
方案一:选择STC89C52作为自行车车速报警系统的控制器。STC89C52是属于51系列的8位单片机,因其集成了定时器、中央处理器和存储器等基本功能模块,且指令集简单易用,非常适合初学者使用。其在小规模应用中具有较高的性价比,并在低速和低成本需求的场合中被广泛采用。然而,由于其处理能力有限,可能无法应对复杂数据处理和多任务需求,限制了其在高速实时数据处理中的应用。
方案二:采用Arduino UNO作为自行车车速报警系统的控制器。Arduino UNO基于ATmega328P微控制器,具有较好的易用性,且拥有丰富的开源资源和外设库,便于快速原型开发。其适合初学者和快速验证项目的需求。然而,在处理能力和扩展性上可能不如更高性能的单片机,特别是对于复杂的传感器数据处理和实时超速报警功能的需求。
方案三:使用STM32F103系列作为自行车车速报警系统的控制器。STM32F103采用32位Cortex-M3内核,具有12位高精度ADC模数转换、CAN通信、SPI通信以及多种定时器等功能模块。其内存容量范围广(64-512K),并支持PLL电路提高运行速度,能够满足高性能和多功能应用的需求。STM32F103系列具备强大的数据处理能力和多个外设接口,非常适合需要高实时性和高精度的应用。
综合考虑,STM32F103系列单片机在性能和功能上均优于STC89C52和Arduino UNO。其强大的处理能力和丰富的外部接口非常适合自行车车速报警系统对于实时车速数据采集、处理、显示和报警功能的需求,因此最终选择方案三作为控制器方案。
2.3.2 车速采集方案选型
方案一:采用霍尔传感器进行车速测量。霍尔传感器通过检测车轮的磁场变化来测量转速,从而计算出自行车的速度。此方案精度较高,能够在多种天气条件下稳定工作,并且能够实时监测车速。霍尔传感器广泛应用于车速测量领域,且成本较低,安装简便,是一种理想的车速采集方案。
方案二:采用光电传感器进行车速测量。光电传感器通过反射光束来测量车轮转速,并计算车速。虽然光电传感器能够提供较高的精度,但在强光或恶劣天气条件下可能会出现误差,并且需要复杂的校准过程。因此,相较于霍尔传感器,光电传感器的稳定性稍逊。
方案三:采用GPS模块进行车速测量。GPS模块通过卫星定位信号获取自行车的位置信息,并计算出当前位置与时间之间的变化率来推算车速。GPS模块的优势在于可以提供较为准确的车速数据,并能够记录位置信息。然而,GPS模块对信号的依赖较大,在隧道或密集建筑物区域可能出现信号丢失,影响车速计算的准确性。
2.3.3 报警器方案选型
方案一:采用蜂鸣器作为报警器。蜂鸣器是一种常见且简单的报警装置,当车速超过设定的阈值时,蜂鸣器发出声音警告骑行者。蜂鸣器成本低、体积小、响应速度快,能够在车速超限时迅速提醒骑行者。此方案具有较高的性价比,且操作简便,但声音的响度和清晰度可能受到环境噪音的影响,尤其是在城市嘈杂的环境中。
方案二:采用语音报警模块。语音报警模块可以通过播放预设的语音提示(如“请减速”)来提醒骑行者。这种报警方式相较于蜂鸣器更加直观,可以更清晰地传达信息。然而,语音模块的成本较高,且需要一定的处理能力和存储空间来支持语音播放,对于单片机的要求较高,并且在高噪音环境中,语音的有效性可能受到一定影响。
方案三:采用LED闪烁警示灯。LED闪烁警示灯作为可视化报警手段,当车速超限时,警示灯开始闪烁,提醒骑行者减速。LED闪烁警示灯的亮度可以调整,适应不同的光照环境,且具有较低的功耗。此方案与蜂鸣器结合使用可以形成多重报警,进一步提高警示效果,但其仅依赖视觉提醒,可能在低能见度的环境下效果不佳。
综合考虑,蜂鸣器能够快速传达警报,且具有较高的性价比。
2.3.4 显示屏方案选择
方案一:采用LCD1602液晶显示屏。LCD1602显示屏具有较低的成本,并能够清晰显示车速、超速阈值等信息。该显示屏适合显示简洁的数据信息,且使用起来较为简单,适合于自行车车速报警系统的需求。然而,LCD1602的显示效果相对有限,只能显示少量信息,并且在强光下的可读性较差。
方案二:采用OLED显示屏。OLED显示屏相比LCD1602具有更高的显示亮度和对比度,能够在强光下提供更清晰的显示效果。它不仅能够显示车速信息,还可以显示更多的状态信息(如系统运行状态、警报状态等)。此外,OLED显示屏功耗较低,适合用于电池供电的系统。尽管价格略高,但其出色的显示效果和较低的功耗使其成为理想选择。
方案三:采用TFT彩色显示屏。TFT彩色显示屏具有更高的分辨率和更丰富的颜色显示能力,适合显示更加复杂的图形和数据。然而,TFT显示屏的成本较高,功耗较大,不适合长时间在低功耗条件下运行。
综合考虑,OLED显示屏在亮度、对比度、功耗和显示效果等方面的优势,使其成为本系统的最佳选择。OLED显示屏能够清晰地显示车速信息及报警状态,提升用户体验,同时具备低功耗特性,适合用于自行车车速报警系统。
3 系统硬件设计
3.1 系统硬件电路总体设计
电源电路:电源电路为自行车车速报警系统提供稳定可靠的电力支持。设计时必须确保电源的效率、稳定性和安全性,采用稳压电源模块来确保系统在不同环境下正常工作。电源电路还应考虑电池的电量管理,防止过放和过充,同时设置过压、过流保护电路,确保系统的长期安全运行。
单片机选型与接口:单片机作为自行车车速报警系统的核心控制单元,负责处理车速数据、执行超速报警及控制显示屏等功能。选用适合的单片机(如STM32系列),其性能要求包括高处理能力、低功耗及多接口支持。单片机需要与车速传感器、蜂鸣器、显示屏及按键模块等外设连接,设计时需确保接口稳定,确保信号传输准确且无干扰。
车速传感器电路:车速传感器(如霍尔传感器)用于实时监测自行车的车速,并将测得的信号转换为电信号供单片机处理。传感器的输出信号需要经过适当的滤波和放大处理,以确保数据准确无误,避免信号噪声对系统的干扰。
显示与输入电路:显示电路通过OLED显示屏实时展示车速信息、设定的超速阈值及报警状态,方便骑行者随时查看系统状态。输入电路用于接收用户操作指令,如设定车速警报阈值、加速、减速或开关控制等。设计时需要确保显示与输入电路的稳定性、准确性与响应速度,避免延迟或误操作。
报警控制电路:报警控制电路用于触发蜂鸣器,当车速超过设定阈值时,蜂鸣器发出警报。蜂鸣器的驱动电路需要确保响应及时,报警声音清晰、响亮,并能够在复杂环境中有效发出警告。设计时考虑到蜂鸣器的电压要求和单片机的输出能力,确保报警电路稳定运行。
整体布局与布线:硬件电路的整体布局与布线非常关键。设计时需要考虑各电路模块之间的空间布局和连接方式,减少信号干扰,确保电源与信号电路分开布线。布线需要简洁、清晰,便于后续调试和维护,确保系统在长期使用中的可靠性和可维护性。
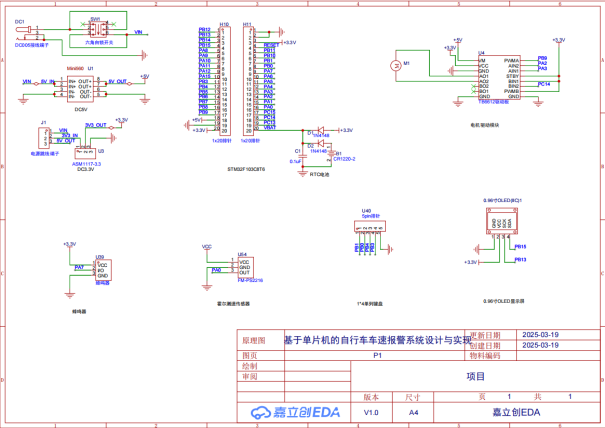
单片机的自行车车速报警系统电路图如图3.1所示。
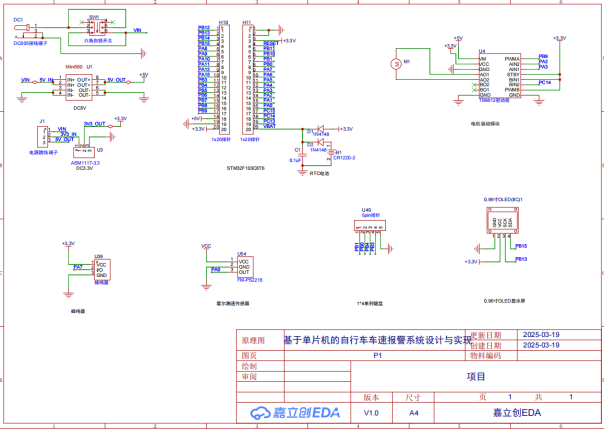
图3.1 单片机自行车车速报警系统总电路图
3.2 系统控制模块电路设计
在开始自行车车速报警系统控制模块电路设计之前,需要对整个系统进行总体设计。总体设计包括系统功能需求、性能指标、工作环境等方面的全面分析,明确控制模块需要实现的功能,如车速检测、超速报警、显示与输入、保护与控制等。
单片机作为自行车车速报警系统控制模块的核心,负责处理车速数据、执行超速报警、控制显示和处理用户输入等任务。根据系统需求,选用STM32系列芯片,并进行相应的配置,包括时钟频率设置、I/O端口分配、中断管理、存储器分配等。
3.2.1 单片机最小系统
STM32单片机的功能主要依赖于其电源、时钟和复位电路的支持。满足这些基本要求后,单片机能够启动并开始工作。最小系统的组成包括:VCC和GND为单片机提供电源,复位电路由电容、按钮和电阻组成,用于确保系统能够在启动时快速准确地复位。时钟电路由外部晶振、瓷片电容等构成,确保单片机以稳定的频率运行,保证系统的正常操作。基本的操纵架构如图3.2所示。
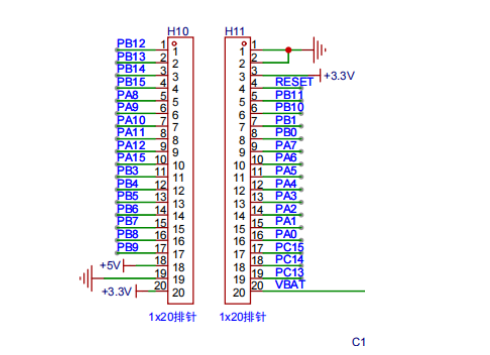
图3.2 单片机最小系统
3.2.2 OLED显示屏模块设计
在本系统中,显示电路通过OLED显示屏实时展示自行车的当前车速、设定的警报阈值等信息。OLED显示屏能够在不同光照条件下提供清晰显示,特别适合户外骑行场景。
输入电路用于接收用户的操作指令,如设置车速警报阈值、加速、减速等。设计时,使用简单的按键模块,确保用户可以方便地进行操作,同时避免由于按键干扰造成的误操作。如图3.3所示。
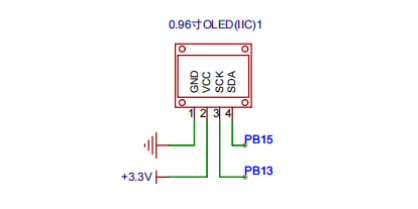
图3.3 OLED显示屏电路图
3.2.3 蜂鸣器设计
蜂鸣器用于在车速超过设定阈值时发出警报,提醒骑行者减速。蜂鸣器的电路包括一个驱动开关,通常使用PNP型三极管(如S8550)来控制蜂鸣器的发声。当单片机发出控制信号时,三极管导通,从而激活蜂鸣器发出声音。由于蜂鸣器需要较大电流,而单片机I/O端口无法提供足够的电流,因此通过三极管进行电流放大,确保蜂鸣器正常工作。如图3.4所示。
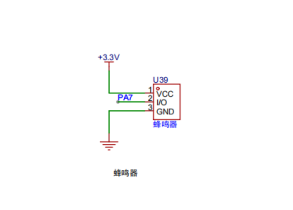
图3.4 蜂鸣器电路图
3.2.4 按键输入模块设计
本系统使用简易的按键输入模块,用户可以通过加速、减速和开关控制来操作系统。按键设计采用独立键盘方式,减少了硬件复杂性。在设计时,考虑到按键可能出现的“毛刺”现象,采用了延迟后重复扫描技术,通过一定的延时去消除短时间内的噪声干扰,从而提高按键操作的准确性。按键的连接图如图3.5所示。
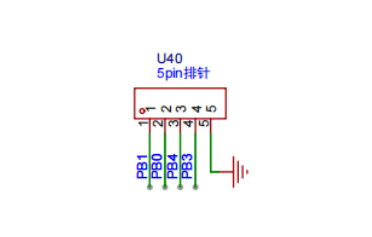
图3.5 按键电路图
3.2.5 车速传感器设计设计
车速传感器(如霍尔传感器)用于实时检测自行车的车速,并将检测到的信号转换为电信号供单片机处理。车速传感器的电路包括信号调理部分,如滤波和放大电路,以确保信号的稳定性和准确性。该传感器通过监测车轮的转动来计算速度,精度较高,适用于本系统实时监测车速的需求。传感器的信号通过单片机进行处理,计算出车速并显示在OLED显示屏上。如图3.6所示。
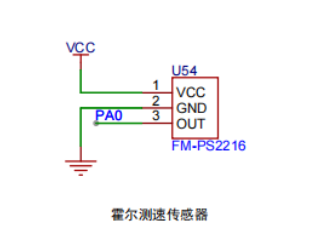
图3.6 车速传感器电路图
4 系统软件设计
4.1 程序语言及开发环境
自行车车速报警系统的控制程序主要使用C语言编写,C语言作为嵌入式开发中常用的语言,具有高效、结构化的特点,适合处理车速数据采集、传感器信号处理、报警控制和显示控制等任务。程序开发环境采用Keil uVision,它是一个广泛应用于STM32系列单片机的集成开发环境(IDE),提供强大的代码编辑、编译和调试功能,能够高效地进行嵌入式程序开发。Keil uVision内置的C编译器(ARM Compiler)用于将代码编译为适合STM32单片机运行的机器码。调试过程中使用ST-Link调试器进行在线调试和程序烧录,实时查看程序执行过程,帮助开发者进行故障排查。开发过程中,使用STM32 HAL库简化硬件外设的驱动开发,减少编程复杂度。此外,使用Proteus等仿真工具进行硬件电路和控制程序的模拟测试,以验证系统设计和程序逻辑。为了团队协作和版本控制,采用Git进行代码管理,确保开发进度和代码安全。通过以上开发环境和工具的结合,确保了系统的高效开发与稳定性,能够顺利实现自行车车速报警系统的功能需求。
4.2 程序流程图设计
4.2.1 总体程序流程图设计
本系统的软件控制流程非常关键,其详细步骤展示在流程图中。首先进行的是系统的初始化操作,特别是计时器的启动。计时器的启动至关重要,因为它能够确保车速显示的实时性和准确性。初始化完成后,系统进入持续的无限循环,在循环中包括几个关键的执行步骤:
读取当前车速值:这是系统的基本功能,通过车速传感器实时监测并获取当前自行车的车速数据。
显示检测出的车速值:采集到的车速值会被送至显示模块,用户可以通过OLED显示屏直观看到当前的车速信息。
车速异常判断与响应:系统会将实时测得的车速与用户设定的超速阈值进行比较。如果检测到的车速超出了设定的范围,系统将立即启动蜂鸣器报警,提醒骑行者减速,并通过LED闪烁灯提供视觉警告。
键盘输入延迟扫描:此功能主要针对系统的交互性设计。用户可以通过按下特定的键盘按钮(如加速、减速或开关控制)来调整警报阈值或操作系统。此时,系统需要有足够的响应时间来处理这些输入,确保设定的准确性和系统的稳定运行。
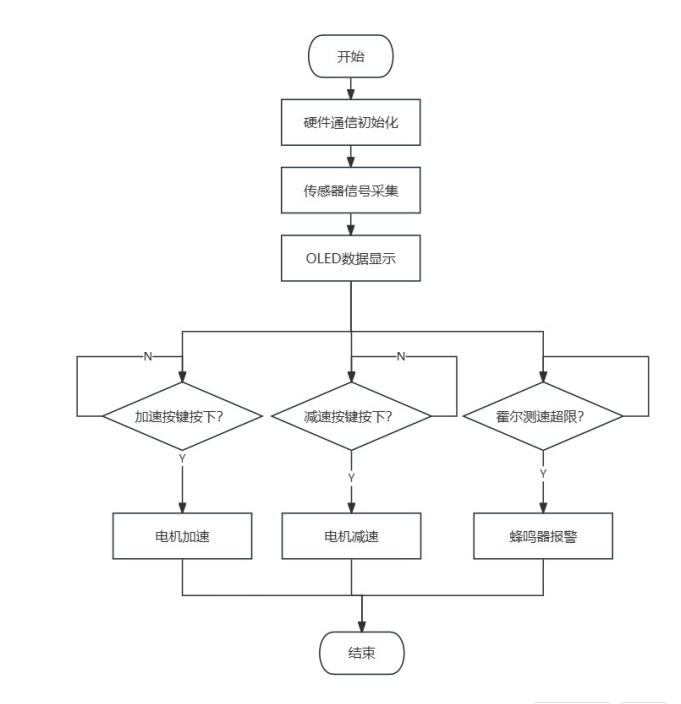
图4.1 程序流程图
4.2.2 车速传感器程序设计
流程图详细展示了读取车速数据的步骤,整个过程主要涉及传感器的初始化与车速数据的获取。首先,进行车速传感器的初始化操作,这是整个过程中的首要步骤,相当于对传感器进行一次“重置处理”,确保传感器状态清晰,无任何残留数据干扰即将进行的车速读取。由于本系统设计中使用的是霍尔传感器,识别传感器的过程相对简化。系统通过发送特定的控制指令来启动传感器的工作,无需进行复杂的设备寻址或匹配。
接下来,系统开始进行车速数据的采集。霍尔传感器会将车轮的旋转信息转化为数字信号,传送给单片机。系统通过定时器周期性地读取传感器的数据,获取车速信息,并进行必要的计算,如车速的换算和单位转换。
在车速数据采集过程中,系统需要进行数据校验,确保采集到的数据有效且稳定。采集到的数据会被传输到显示模块进行展示,并与设定的车速阈值进行比较。如果车速超过设定阈值,系统将触发蜂鸣器报警,提醒骑行者减速。
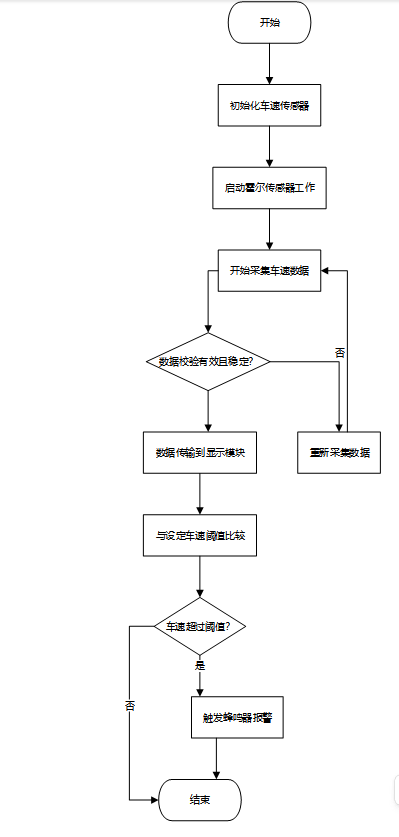
图4.2 车速传感器程序流程图
5 硬件组装调试与软件调试
5.1 元器件的选择与测量
本设计的主要组件包括:STM32单片机、晶振、电阻、电容、按键、开关、蜂鸣器、车速传感器、显示模块等。所有零件的引脚必须在了解其特性后再进行焊接。焊接时要特别注意各个元件的正负极性、芯片引脚顺序以及电阻和电容的大小。电阻的大小可通过色环读取或使用万用表测量;电容和水晶振荡器的规格由零件本身的标准决定。
5.2 元件的焊接与组装
在进行单片机自行车车速报警系统的组装前,每一个电子元件都必须经过详细的测试,确保质量达到标准,以保证系统最终的性能和可靠性。所有集成电路(IC)的安装方向必须统一,确保便于焊接和故障排查。对于离散元件,如电容器和二极管等,必须正确识别并标记每个器件的极性,避免在装配时出现错误。焊接时要保持简洁,布线要避免交叉和重叠,确保电路的稳定性和效率。
5.3 硬件调试
硬件调试是验证系统性能的关键步骤。在电路装配完成后,需要进行详细的参数测量,确认电路设计和元件功能是否符合预期。调试分为多个阶段,首先是准备工作,包括检查电路连接是否正确,确保没有漏接、短路或错误接线。接下来,进行初步通电测试,观察电路是否有异常现象,如部件过热、电源短路等。如果出现问题,立即断电并排除故障。随后,进行单元电路的调试,测试各部件的静态和动态性能,确保电路的信号流向正常。最后,对整机电路进行调试,检查动态性能和系统的整体运行状况。
5.4 软件调试
软件调试是确保程序按照设定流程运行的关键环节。首先,需要对定时器进行初始化设置。接着,系统将读取车速传感器的数据,并更新显示屏上的车速信息。然后,系统会检查当前车速是否超过设定的超速阈值,若超速,系统会触发蜂鸣器报警功能,并继续监测按键输入。如果车速未超限,系统将跳至按键处理阶段,检查用户输入,如加速、减速或开关操作。如果按键被激活,系统会进行延时操作;如果没有按键输入,系统将继续延时并返回初始状态,等待新的输入。
6 结论
本文成功设计并实现了基于STM32单片机的自行车车速报警系统,涵盖了硬件平台的搭建与软件功能的开发。该系统主要由STM32单片机、霍尔车速传感器、OLED显示器、蜂鸣器和按键模块组成,能够实时监测自行车的车速,并在车速超过设定阈值时触发报警。硬件调试过程中,通过精确连接各个传感器和显示模块,确保了系统的稳定性与可靠性。软件调试阶段,结合Keil开发环境,成功实现了车速采集、车速显示、报警逻辑和按键输入控制等功能。经过多次测试,验证了系统的准确性与灵敏度,确保系统能够在车速超限时及时发出报警并提醒骑行者减速。
该系统不仅具备独立的本地报警功能,还能够通过蜂鸣器和LED灯提供多重警示,保障骑行者的安全。通过实际测试,系统表现出优异的稳定性与可靠性,能够高效监控车速,及时提醒骑行者在超速时采取措施,确保骑行过程中的安全性。未来,随着传感器技术和单片机性能的不断提升,该系统能够实现更智能、更精准的车速监控,并与更广泛的智能交通系统进行集成,为智能出行提供更加高效、可靠的解决方案。
致 谢
时光匆匆,四年的本科生活即将画上句号。在这个特别的时刻,我衷心地感谢所有陪伴和支持我的人们。首先,我要对我的导师表示最深的谢意。您在学术上的严谨和对生活的热爱都深深地影响了我。您的每一次指导都让我受益匪浅,每一次的鼓励都让我更加自信。感谢您为我提供的学术资源和人生建议,这些都将成为我未来道路上的宝贵财富。其次,我要感谢我的同窗们。是你们的陪伴让我的大学生活充满了欢笑和泪水,是你们的支持让我在困难中不断前行。在一起的时光,无论是学习还是玩乐,都将成为我人生中最美好的回忆。当然,我不能忘记感谢我的父母。你们的爱护和支持是我前进的动力,你们的教诲和引导让我成为了一个更好的人。感谢你们为我付出的一切,我会用我的努力和成功来回报你们。最后,我要感谢所有在我人生旅途中给予帮助和支持的人。你们的善意和关怀让我感受到了人间的温暖,你们的支持和鼓励让我勇敢地面对未来的挑战。展望未来,虽然充满了未知,但我相信,有了你们的支持和陪伴,我一定能够勇往直前,迎接新的挑战,创造更加美好的未来。
参考文献
- 李岩,袁红,王晓艳,等.基于物联网的安防智慧园区平台设计[J].测绘与空间地理信息,2025,48(03):73-75+79.
- 张鹏.高速公路信息化建设中物联网技术的应用与前景[J].汽车周刊,2025,(04):61-63.
- 陈瑜烙,章程杰,林宇洪.基于物联网的无人机交通警察系统设计[J].物联网技术,2025,15(06):85-88.
- 闻胜男,苏娟.基于STM32的心电监测系统设计[J].集成电路应用,2025,42(01):55-57.
- Wang X ,Li X ,Du H , et al.Design of an intelligent disinfection control system based on an STM32 single-chip microprocessor by using the YOLO algorithm[J].Scientific Reports,2024,14(1):31686-31686.
- [6]杨明川,刘怀强,孙长平.基于STM32单片机的智能大棚监控系统设计[J].自动化应用,2024,65(22):173-176.
- 梁成功,崔梦瑜,边鑫荣,等.基于STM32单片机的智能手环设计与实现[J].中国新技术新产品,2024,(22):32-35.
- 都治楠,李长星,王斌涛,等.基于STM32单片机的智慧农业系统设计[J].电子制作,2024,32(22):57-60.
- 郭嘉豪.基于多传感器数据融合的驻车制动报警系统设计[D].西安工业大学,2024.
- 胡孙杰,彭时翔,张小西,等.基于单片机的自行车车速报警系统[J].电子制作,2023,31(17):53-56.
- Yuhang X .Design of Intelligent Voice Greenhouse System Based on STM32 MCU[J].Journal of Physics: Conference Series,2023,2562(1):
- Xia M ,Xiaoyan C ,Jianliang L .Design of Smart Bracelet Based on STM32 Microcontroller *[J].人工生命とロボットに関する国際会議予稿集,2022,271080-1084.
- 刘强,李金宝,姬鹏东.基于单片机的超速报警系统的设计[J].集成电路应用,2021,38(12):16-17.
- 洪腾腾,靳轩轩,武雪峥,等.基于单片机控制的电动自行车车速报警系统设计[J].科学技术创新,2021,(28):154-156.
- 彭井花.共享单车车速检测报警系统的设计[J].绵阳师范学院学报,2020,39(02):31-34.
附录A:系统电路图
附A1 系统电路图

















 731
731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









