



超低净空压入式钢板桩打桩机的研发
摘要
钢板桩广泛用于挡土和止水。在现有低矮桥梁梁体下且水位相对较高的条件下施工,常面临极低净空高度的问题,通常需要 costly 的上部结构拆除重建或临时绕行。为此开发了一种新型压入式钢板桩打桩机,可在仅1.0米(3.3 英尺)的净空高度下作业,以避免此类昂贵的应对措施。为实现这一具有挑战性的目标,开发并整合了以下新技术。
- 压入式打桩机的高度比以往的设备进一步降低。
- 新设备能够在无需抬升自身的情况下前后移动,而通常压入式打桩机需要抬升才能移动。
- 开发了特殊的机械接头,可实现钢板桩的水平互锁以及垂直方向上的拼接,且接头数量最少,无需焊接。
- 开发了在低矮梁下方运行的上方钢板桩输送系统。
- 开发了一种新型的半潜式操作员作业平台系统。
- 安装了多功能水下摄像头,用于监测钢板桩的状态,特别是在拼接过程中。
新系统在日本东京附近的武藏水渠改善工程中,于水道下穿低矮铁路钢梁的路段,在1.0米(3.3英尺)的上方净空条件下成功安装了钢板桩墙。
引言
武藏渡槽是一条长14.5公里(8.8英里)的混凝土衬砌水道,将利根川的水引至荒川,以满足日本中部东京及其他周边城市的用水需求。该渡槽位于东京西北约60至70公里(36至42英里)处。自1967年投入使用以来,目前正在进行全面修复工程,以修补结构劣化并增强其抗震能力。渡槽穿越东日本铁路公司繁忙的高崎线,此处进行渡槽修复工程的上方净空仅有1.0米(3.3英尺)。

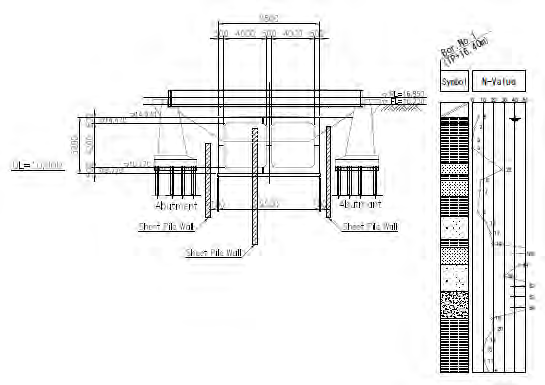
施工现场施工前状况见图1。铁路交叉段的工程是在斜向穿越的铁路钢梁(长约35米,即115英尺)下方建造预制混凝土双孔涵管箱体。虹吸结构内部横截面尺寸为两个4米宽、4.2米高的矩形(见图2)。施工现场地质条件主要为软粉土和中砂,钢板桩贯入范围中部最大N值约为30。

渡槽必须始终承载一定量的水流。因此,施工采用多级导流法,利用沿水流方向打入渡槽地板的钢板桩墙进行施工。图3显示了采用此方法建造虹吸结构的施工顺序。通过建造三道临时钢板桩墙来实现渡槽的导流。
中心钢板桩墙必须在上方净空为1.0米(已安装的板桩顶部与梁底之间)且水流速度高达每秒1.7米(5.5英尺)的高速水流条件下率先施工。该系统进行钢板桩施工的顺序如下。
- 在铁路梁投影范围的上游侧,使用振动锤打入了四根钢板桩。
- 在铁路梁下方安装了上方钢板桩输送系统。
- 作业起重机将压入式钢板桩打桩机放置在由振动锤打入的前四根钢板桩顶部。
- 上方钢板桩输送系统将一根钢板桩输送至压入式打桩机位置。
- 打桩机抓住钢板桩,将其固定在夹头中,并开始压入打桩作业。
- 打桩机重复进行压入作业,直至钢板桩达到设计深度,然后移动到下一根钢板桩的位置。
- 重复压入作业,直到最后一根钢板桩安装完毕。
- 打桩机返回起始位置,作业起重机将设备吊起并进行拆卸。
在项目规划阶段,铁路公司(项目业主)咨询了日本压入式打桩设备制造商,以确认在梁下进行钢板桩施工是否可行。此前类似情况下实现的最小净空高度为1.55米(5.1英尺)。该制造商当时正在开展新型低净空设备的研发。应铁路公司的要求,制造商加快了研发进程,以满足项目进度。图4是显示钢板桩打桩机、渡槽中的钢板桩、板桩输送系统与铁路梁之间关系的示意图。
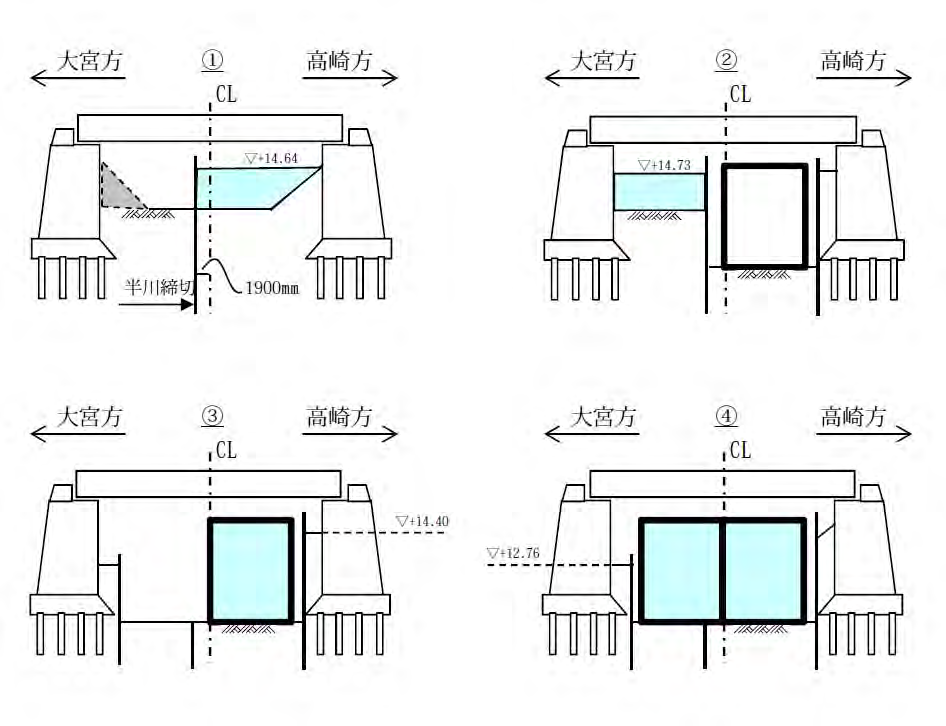
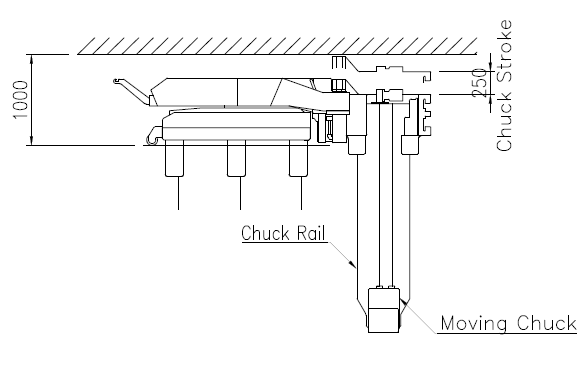
图5显示了打桩机的略微放大的剖面图。鞍座集成了夹具,用于固定已打入的钢板桩。其上方的桅杆可水平旋转并前后移动。卡盘组件由半圆形卡盘架、垂直悬挂导轨和垂直移动卡盘部件组成。夹头架的开口用于侧向插入钢板桩。移动卡盘部件沿导轨上下移动,以将钢板桩压入地面。整个卡盘组件可水平旋转并垂直上下移动,以控制打桩。
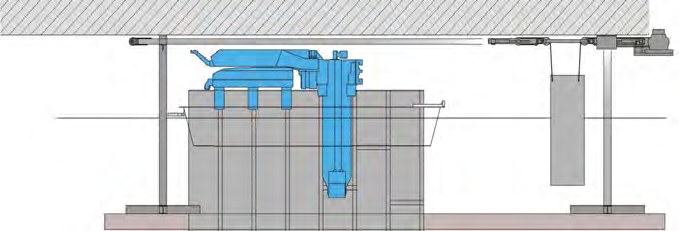
图6显示了其从下游侧的横截面视图。与钢板桩线平行的板桩输送系统悬挂在铁路梁上。在铁路梁下方的设备两侧设有两个半潜式船形工作台,工人可在上面安全作业。
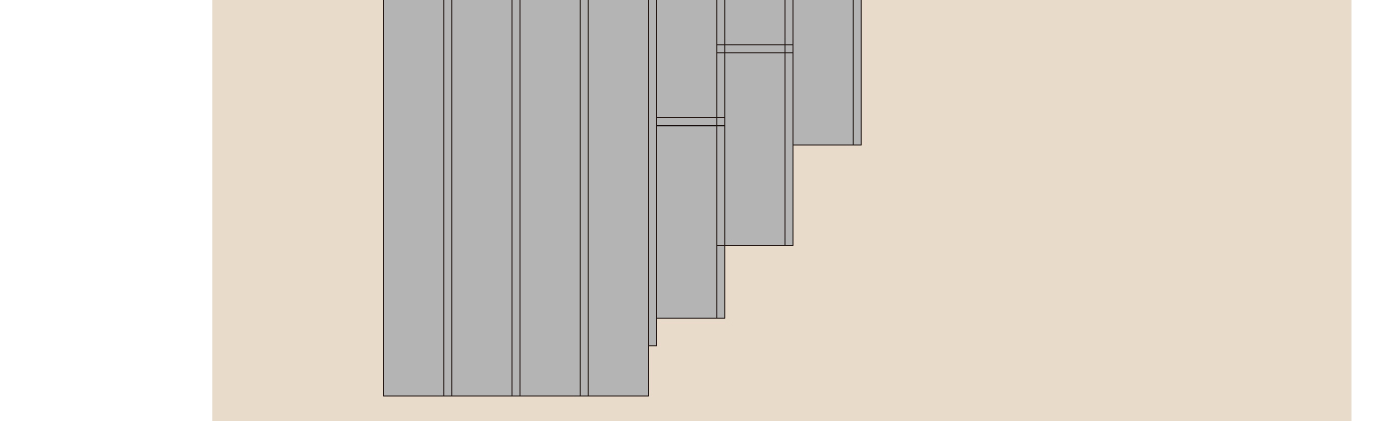
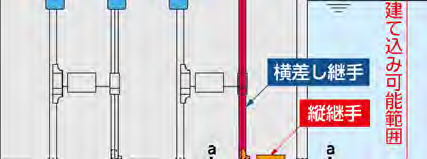
如图7所示,U型钢板桩的短节段(0.88、1.88和最典型的2.0米长)通过打桩机在水平和垂直方向上进行机械接头连接。图8显示了钢板桩通过专门研发的垂直连接器,通过水平啮合及新板桩的后续旋转(35到50度)将钢板桩连接。在泥线以下部分插入了楔形板,以防止可能的脱开。该侧向锁扣系统的研发使得钢板桩的长度几乎可以达到梁与渡槽底部之间的距离。采用此系统相比之前的系统显著减少了接头数量(见图9)。
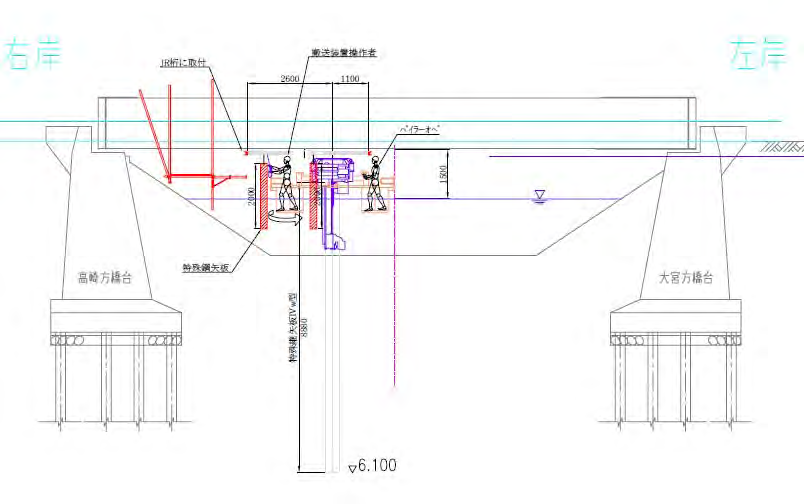

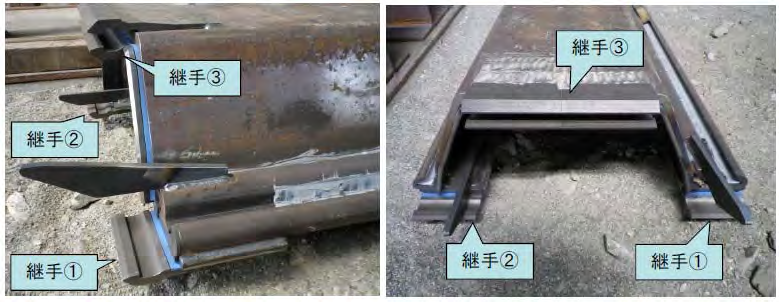
图10显示了用于机械拼接的已准备好的接头。每个接头处有三组独立的接头套筒。图11显示了这些接头在对接位置的情况。共制作了四个接头,形成了一根8.88米(29.1英尺)长的板桩进行安装。
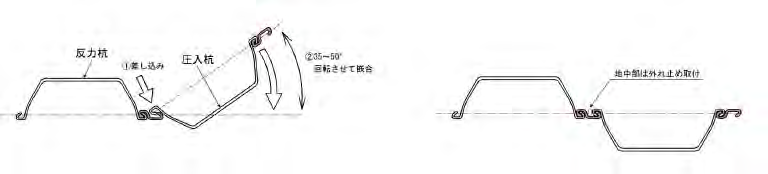

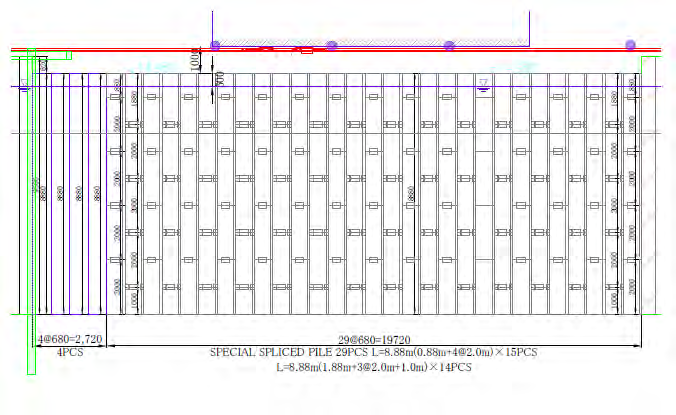
图12显示了类型3上下接头连接器的典型示意图。拼接通过上部接头连接器压入下接头连接器直至相互锁紧实现。粘贴在上部接头凹槽内的亲水带最大限度地减少了接头处的渗水。图13显示了铁路梁附近及下方的钢板桩布置,其中标明了接头位置。
使用水下摄像头监控水下接头的拼接情况,以便操作员进行必要的调整。图14显示了在工厂测试期间通过摄像头监控拼接的情况。前景中展示了钢板桩和带有两个摄像头的夹头轨道,背景中为操作员。

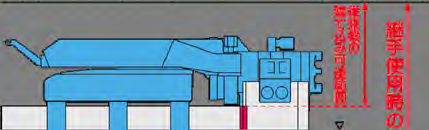
通常情况下,压入式打桩设备通过夹头夹住已部分安装的桩,然后将自身抬起,并根据需要使其余部分向前或向后移动。但对于该打桩机而言,桅杆和鞍座的提升空间不足。因此,该设备通过独立调节夹具的水平位置实现自行移动,使夹具在移动过程中不会与钢板桩发生干涉。其动作顺序见图15。此功能消除了在压入作业过程中使用作业起重机移动打桩机的需要。
施工现场的地质条件主要是软粉土和中砂。高压水射流附件被用于辅助压入作业。
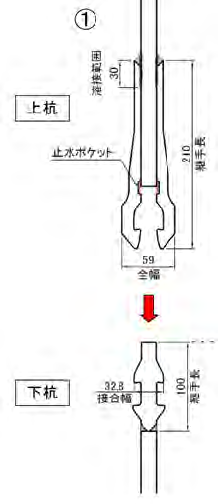
图16显示了打桩机在使用前于平台上组装的情况。图17和图18显示了打桩机在铁路梁下压入钢板桩的过程。图19显示了已完成的中心钢板桩墙,以及钢板桩后方改道的渡槽水流。


可以进行未来的改进/优化,使系统能够应对更坚硬的土层条件,并使板桩输送系统更易于快速组装和拆卸。锁扣/接头可进一步优化以产生更小的摩擦力,实现更快的打桩速度。

图20显示了在渡槽干涸部分建造的虹吸结构的一半,水流被引导至中墙的另一侧。
结论
超低净空压入式钢板桩打桩机成功在1.0米(3.3英尺)的上方净空中安装了钢板桩,施工期间渡槽水流流速较快,且未对上方铁路运营造成任何中断,也未损坏渡槽。除超低净空压入式打桩设备的研发外,特殊机械接头和上方钢板桩输送系统对该施工也至关重要。作者认为,该应用将成为类似困难条件下未来项目的标杆。该设备目前由制造商存放在日本。

















 949
949

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









