



意识动作及其引发用户行为的时机
摘要
近年来,机器人逐渐为人们所熟悉。特别是应用于人类生活空间的交流机器人,其开发备受关注。目前针对交流机器人已开展大量研究,主要集中在机器人对用户行为所做出的反应。我们正在开发能够诱导用户行为的机器人意识动作。通过适当地控制动作时机,人类可以更轻松地与机器人进行交流。根据敏感性评估,我们确定了机器人意识动作的合适时机。
关键词 ——意识动作;交流机器人;人机交互;敏感性评估
引言
关于交流机器人的研究大多集中在机器人对用户行为的反应性能上,已开展了大量工作[1]。然而,对于被动型个体而言,主动与交流机器人进行互动存在困难。因此,有必要使这类人群更容易产生与机器人互动的行为。为此,我们引入了一种在交流机器人中诱导用户行为的功能。
对话被认为是用户对交流机器人的一种行为。先前的研究结果表明,通过使用意识动作[2]给予机器人一种感知印象,可以使对话变得更加容易。他们从机器人的东侧给予印象,使其转向并对用户的眼睛做出反应,然后等待用户的回复。然而,他们的方法并未包含动作的时机,而如果考虑适当的时机,则有可能进一步提升效果。因此,我们进行了一项敏感性评估实验,以研究在用户注视机器人后,机器人作出反应之前的适当时机,并探讨了动作时机与用户与机器人交谈的灵活性之间的关系。
II. 实验敏感性评估
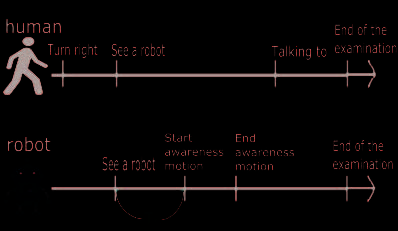
为了确认使对话更容易的机器人最佳反应动作(意识动作)时机,我们进行了关于敏感性的评估实验。实验中使用了阿尔德巴兰机器人公司的人形机器人Nao[3]。我们生成的意识动作为机器人“抬起右侧手臂,然后放下”的动作。通过采用巫师奥兹(Woz)方法远程控制Nao,来设定动作的时机。实验协议如图1所示。当受试者注视机器人Ts秒后,机器人执行意识动作。Ts以0.0[sec]为起点,以0.5[sec]为间隔,逐步增加至3.0[sec]。
我们参考了先前的研究知识[4],其中提到“当智能体凝视用户时,凝视时间的平均值为 2000[ms], ,且持续时间非常长”。我们在不同实验环境所获得的知识中加入了宽度时间,并据此确定最大Ts。此外,我们进行了机器人不移动的实验,以比较执行与不执行意识动作时受试者的印象差异。
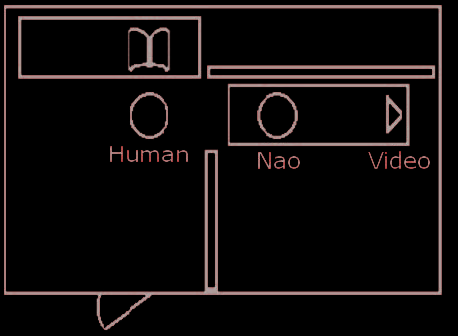
图2展示了进行实验的空间。我们将机器人放置在距离受试者侧面 100[cm]处,让其坐下。在机器人后方安装了一台摄像机,用于判断受试者看到机器人眼睛的时机,并记录受试者对意识动作的反应。我们在每次实验结束后向受试者提供以下指示,并让他们进行印象评价。如果房间中有多个受试者,机器人会自动分配给在场的受试者。
- 该实验在受试者位于房间内的情况下进行。
- 我们让受试者进入房间,坐在椅子上并阅读一本书
- 阅读结束后,我们让受试者向右转,并看到机器人。
- 我们让受试者与机器人交谈,直到出现信号为止
- 给定;以确认语音的建立。
- 实验进行了八次
A. 印象评价
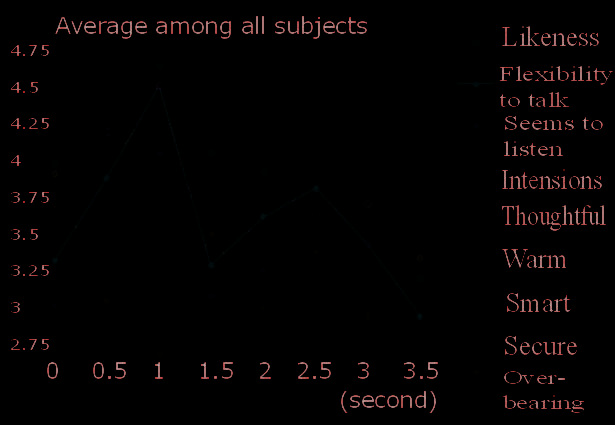
我们通过参考先前的研究[2],对九组形容词对进行了七步评估。这些是实验中使用的形容词对。
- 喜欢–不喜欢
- 易于交谈 – 难以交谈
- 机器人似乎在听我讲故事——似乎没有
- 机器人有某种意图——没有
- 体贴的——不体贴的
- 温暖的——冷漠的
- 聪明的——笨拙的
- 安全的——不安全的
III. 印象评价实验
我们以15人(11名男性,4名女性)作为受试者进行了实验,受试者年龄为22至26岁。由于我们基于WOZ(Wizard of Oz)方法对机器人进行远程控制,因此通过视频分析记录了设定Ts与实际Ts之间产生的差异。因此,我们基于实际Ts对结果进行了分析。图3显示了每个评估维度的图表,我们根据Ts每0.5[秒]计算一次平均值。总体印象值在接近1.0[秒]时较高,峰值出现在约2.5[秒]和0.5[秒]附近。在本报告中,我们重点关注用户与机器人对话灵活性的价值,这是我们的研究目的。
A. 对话的灵活性的价值
首先,我们使用丹尼特测试来考察执行的动作对评价的影响差异。在静态动作条件下,从0.5[秒]到3.0[秒]执行的动作之间存在显著差异(显著性水平为5%)。其次,我们使用Turkey-Kramer检验进行了分析,但未能确认各个时机之间存在显著差异。
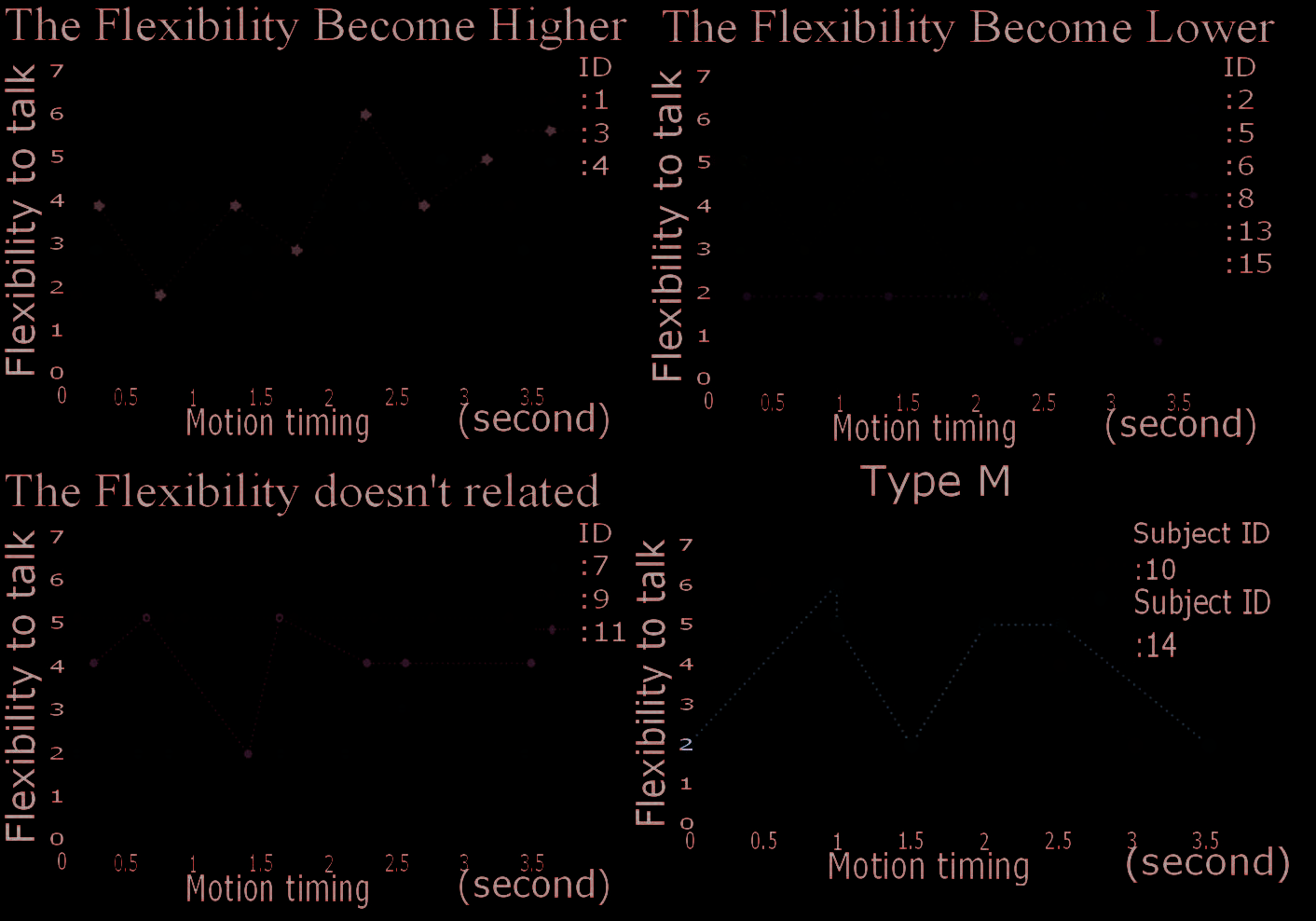
对话的灵活性与动作时机之间的关系存在四种趋势。我们记录到,当时机延迟时,灵活性提高(3名受试者),当时机延迟时,灵活性降低(6名受试者),以及与时机无关的情况(3名受试者)。此外,我们注意到在特定时机下灵活性提高,称为M型(2名受试者),如图4所示。
B. 用户与机器人交谈的时机
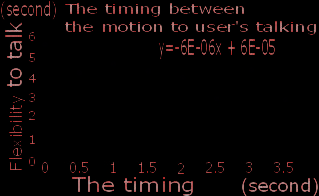
图5 显示了开始意识动作的时机与机器人开始动作后受试者讲话的平均时间之间的关系。回归线的斜率为负值,因此受试者对机器人说话的时机被延迟,导致机器人启动运动延迟。
C. 描述
我们在每次实验结束后让受试者描述对意识动作的印象。
如果机器人不执行动作,他们会描述“机器人看起来像装饰品”以及“难以与机器人交谈”。在Ts= 1.0[sec],的情况下,他们描述为“当我犹豫是否要说话时,机器人会引导我说话”,“时机稍慢,但机器人在我开始说话前举起了手”。在Ts= 2.5[sec],的情况下,他们描述为“当我与它交谈时,机器人有回应”,“即使我没有开始说话也促使我开口”。在Ts= 3.5[sec],的情况下,他们描述为“时机太慢”,“难以开口”,“不确定机器人是否会跟我说话”。
IV. 摘要
我们发现,通过丹尼特测试的结果表明,用户在机器人使用意识动作后更容易与其交谈。此外,我们发现当Ts=1.0[sec]时,由于用户感觉机器人诱导了对话,其对话的灵活性更高。这一结果支持了先前的研究:“在人与机器人交互过程中,当机器人的响应时间延迟1秒时,用户对机器人的印象达到最高,且该结果并非单调递减”[5]。在我们的实验中,我们认为,当用户转向右侧时,由意识动作引发的响应与用户交谈的灵活性相关。在Ts=2.5[sec]的情况下,该值也更高,因为用户可能像在Ts=1.0[sec],的情况下一样,感受到机器人诱导其交谈,但具体的验证尚未进行。而在Ts=3.5[sec],的情况下,由于动作时机过于延迟,根据丹尼特测试和用户印象的结果,用户不再将该动作为视为意识动作。
V. 结论
我们以诱导用户行为的机器人开发为第一步,研究了机器人意识动作的适当时机。通过实验敏感性评估,我们发现当机器人在用户看到机器人后1.0秒执行意识动作时,用户感觉更容易与其交谈。本次我们采用了受试者之间的平均值,但未来还计划根据用户的社交角色、性格等个体属性进行分析,因为适当时机可能因用户而异。

















 36
36

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









