



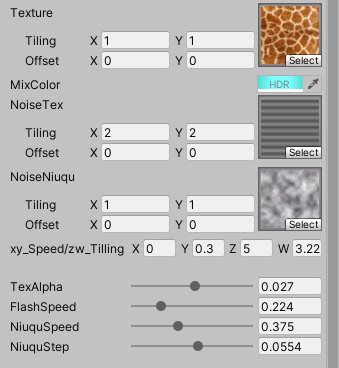
最近看了一些全息投影的效果案例,但是总感觉效果不太满意,所以自己写了一个符合自己心目中要求的。其中的知识点汪汪在前几期已经讲解过,汪汪以后的实践可能会更多的偏向思路,当然,以后接触光照模型的时候,会偏向理论和实践。 好啦,先来看看汪汪自己实现的效果: 上面所有的参数,颜色,扫描线粗细,快慢都是可调的 当然,对于有些简单结构的模型,我们可以同时渲染背面,这样看起来就比较复杂和凌乱,还是看需求嘛:

接下来是实现思路:
- 首先是扫描线的实现:
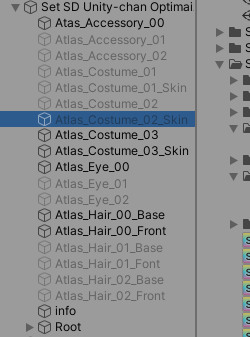
由于我们写的shader面对的是很多模型,需要有广泛适用性。 所以对于利用噪波图读取透明度值,再利用UV移动的方式就是不可取的,感兴趣的小伙伴可以尝试一下,利用UV偏移来制作扫描线,看看比较复杂的模型的情况。 最好的解决方法,是利用屏幕坐标,这样所有的模型的扫描线就都是平顺的,不会出现乱七八糟的情况。 这样对于比较复杂的模型,我们的shader也就较好显示了: 比如汪汪在商店下载的Unity-chan的卡通模型,就是由多个模型组合的: 这种情况下,大家都知道,对于透明的实现是需要额外考虑的,并且每个模型有单独的UV,对于这种模型,利用UV动画明显不可取。 但是利用屏幕坐标就能很好解决这个问题: 扫描线目前有两种实现方式,一种就是直接计算,利用屏幕坐标,提取平行线,染色,加粗。 另一种就是汪汪使用的利用噪波图,读取其灰度值来作为最终输出主帖图的alpha值。 这里汪汪把其他的实现也一并放上,下文中进行讲解: 由于这里引入了噪波图,所以大大减少了代码量,因为不用去计算扫描线。
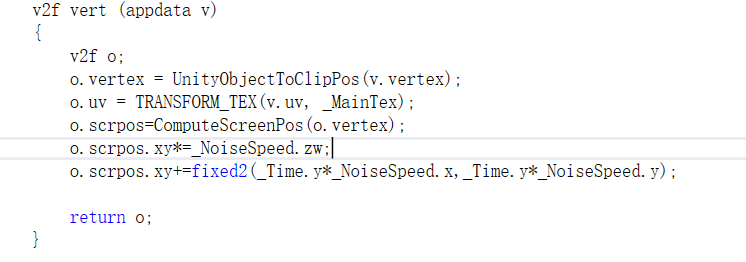
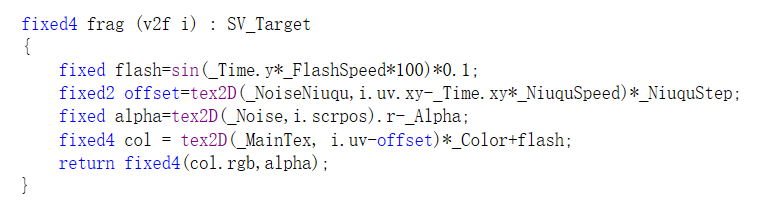
- 再来就是闪烁,汪汪使用sin函数来实现颜色提亮,变暗,以此可以有种闪烁的效果。
需要注意的是,我们在编程中一般不提倡在片元函数中加入一些复杂的计算函数,比如三角函数和开方等,这个是汪汪后期的优化工作了,不做赘述。 接下来进行一些扭曲效果,这个汪汪上节讲过,就是扭曲UV,我们通过引入一张额外的贴图,来得到扭曲效果: 引入贴图的好处就是对于美术人员,他能通过绘制贴图的方式,来自行决定效果,我们提供的只是一些逻辑实现。 那本期实践就到这里,小伙伴们如果有一些优化建议和看法,可以留言评论,喜欢的小伙伴也可以关注汪汪,汪汪会持续为大家带来一些特效案例,以及美术上的一些心得,偶尔也会有一些脚本上的。

















 667
667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









