







 本文介绍了如何使用NCNN进行人脸识别和关键点检测,包括将原始的Retinaface模型从Caffe转换为NCNN格式,以及使用转换后的模型进行推理验证。同时,文章还探讨了自己转换YOLOV5S模型的过程,并对比了人脸检测与人形目标检测算法的差异。
本文介绍了如何使用NCNN进行人脸识别和关键点检测,包括将原始的Retinaface模型从Caffe转换为NCNN格式,以及使用转换后的模型进行推理验证。同时,文章还探讨了自己转换YOLOV5S模型的过程,并对比了人脸检测与人形目标检测算法的差异。
参考以下连接获取原始 retinaface模型:
mirrors / wzj5133329 / retinaface_caffe · GitCode
https://github.com/deepinsight/insightface/tree/master/RetinaFace
retinaface(mxnet)的CAFFE模型
https://github.com/Charrin/RetinaFace-Cpp/tree/master/convert_models/mnet
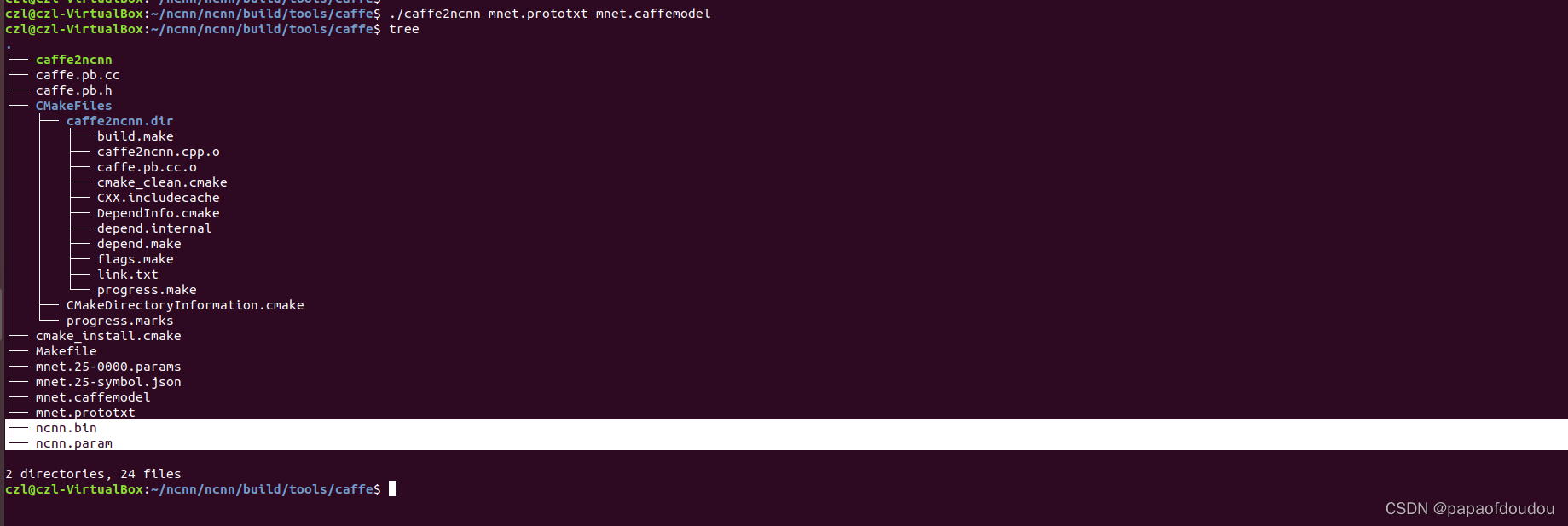
使用caffe2ncnn将模型转换为NCNN格式,需要注意的是,环境需要事先安装protobuf的开发环境,否则CMAKE阶段会警告无法生成caffe2ncnn和onnx2ncnn的问题,因为这两种格式用的都是protobuf来描述的。
sudo apt-get install libprotobuf-dev protobuf-compiler
sudo apt-get autoremove --purge protobuf-compiler
sudo apt-get autoremove --purge libprotobuf-dev编译成功后,执行命令./caffe2ncnn mnet.prototxt mnet.caffemodel进行模型转换即可。
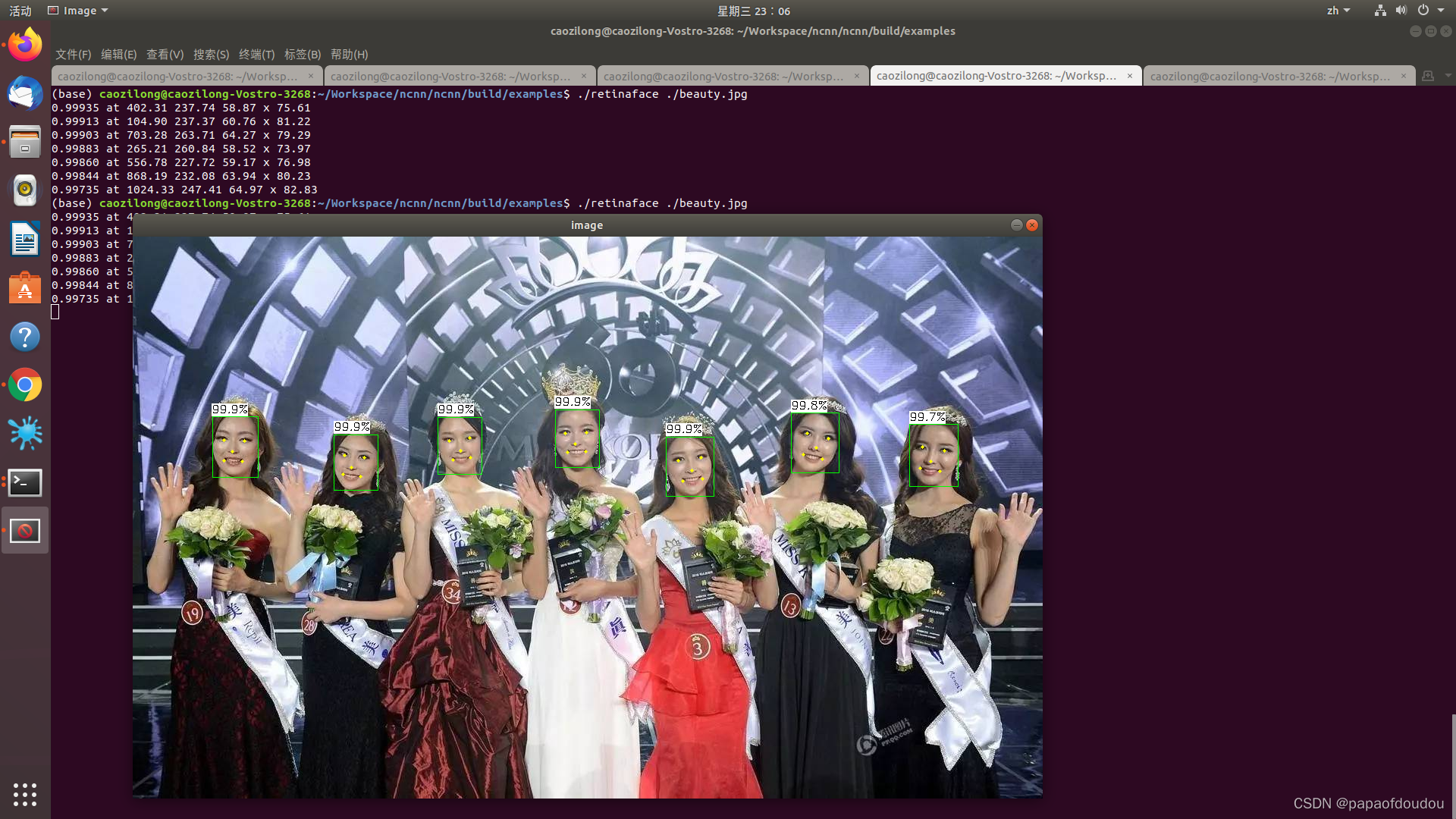
之后重命名ncnn.bin,ncnn.param为应用识别的文件名,即可以推理验证:

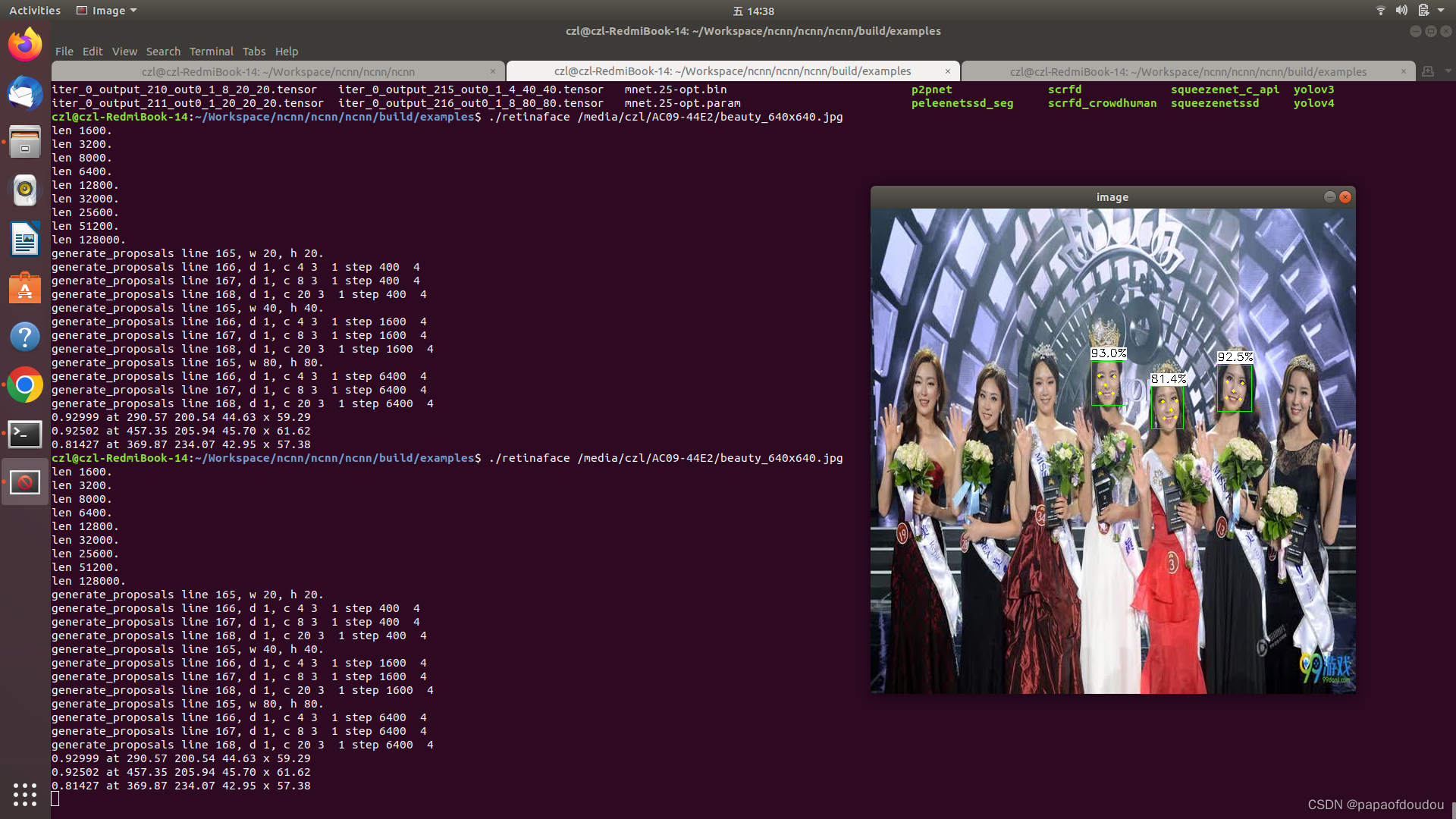
执行命令:./retinaface ./beauty.jpg
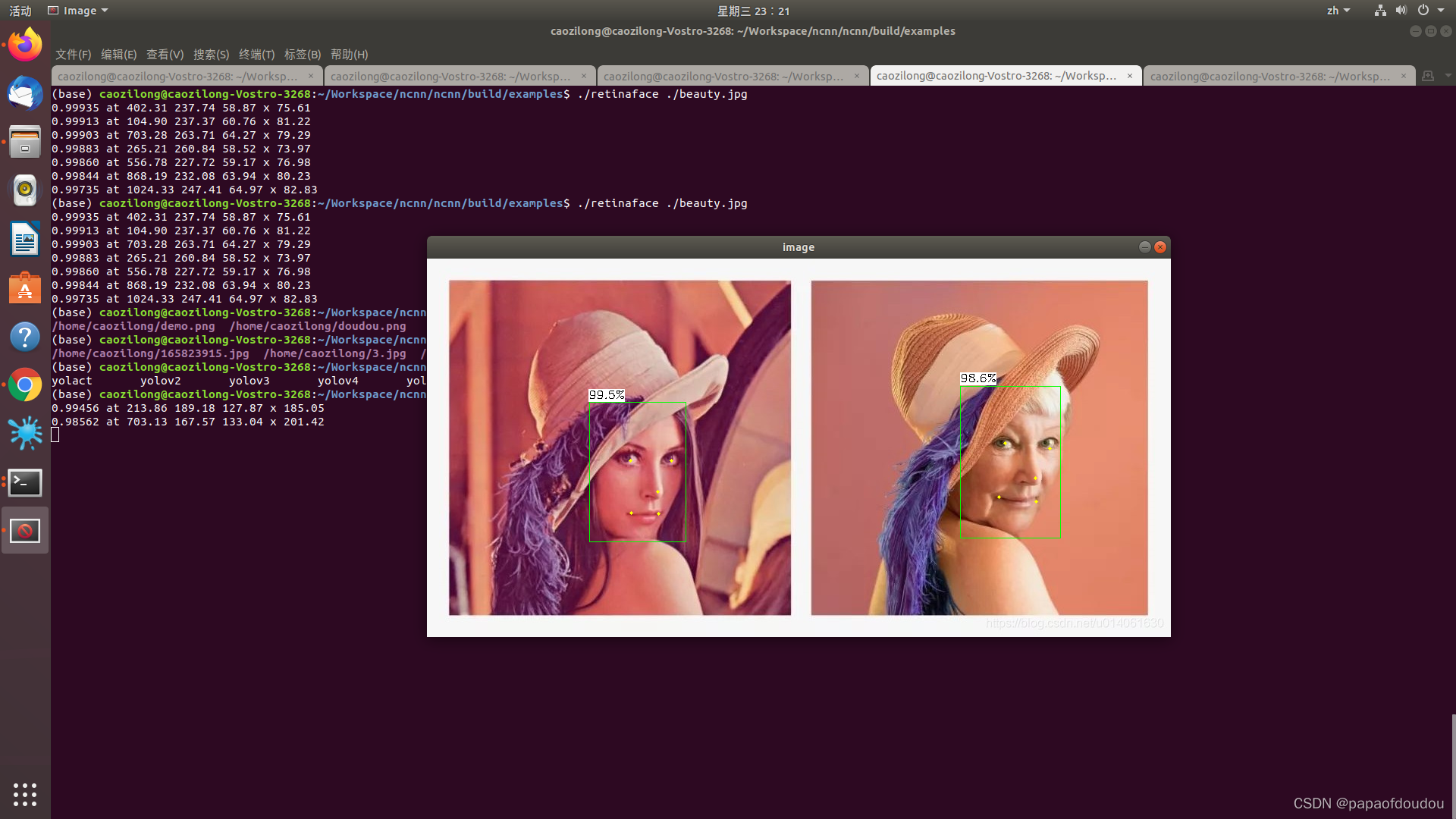
lena大妈
百度人脸的结果: 
对结果进行检测:
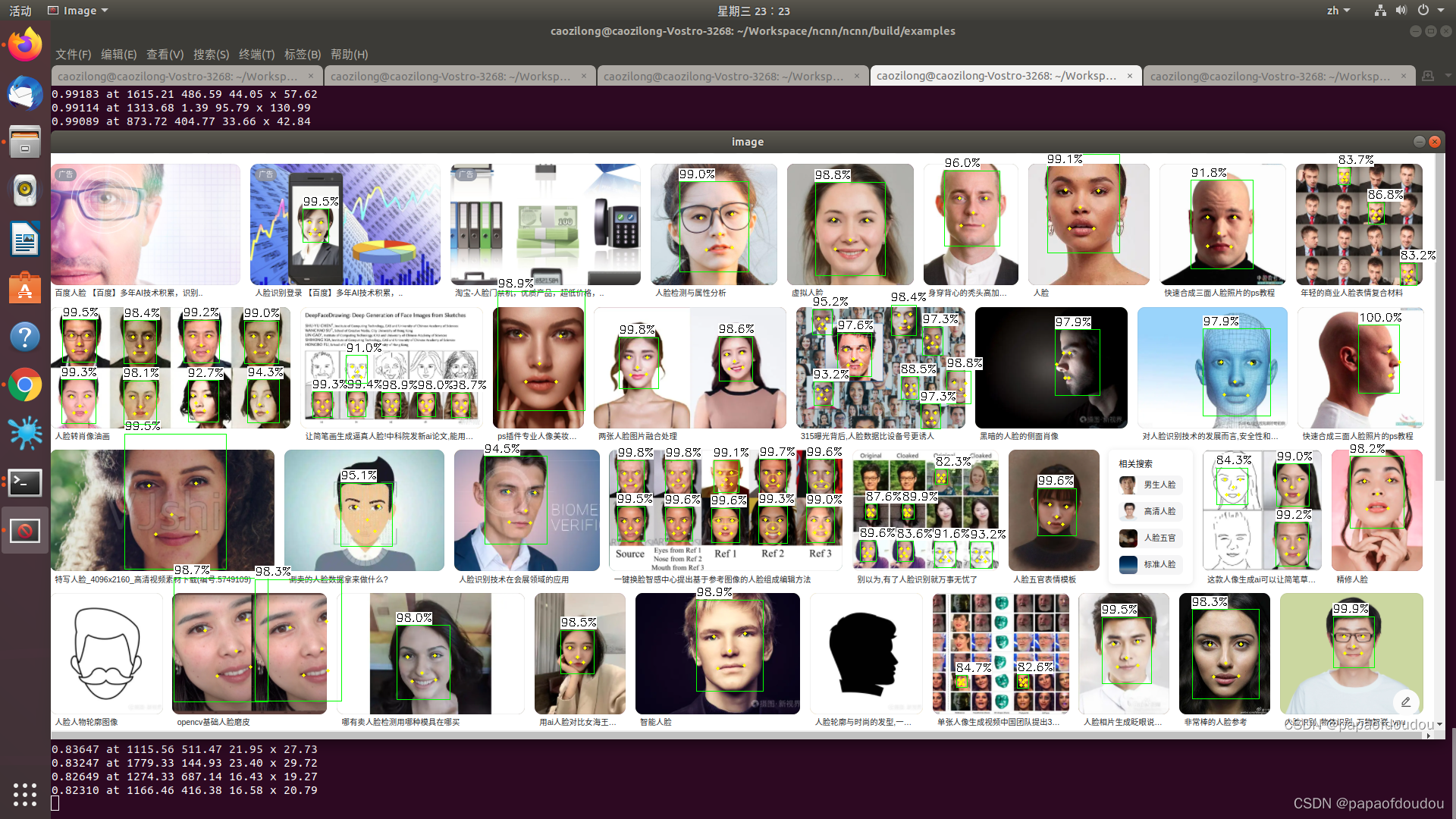
以上是用NCNN自带的模型测试的效果,下面用自己转的模型验证:
按照符合网络输入要求的图像尺寸做scale后输入:


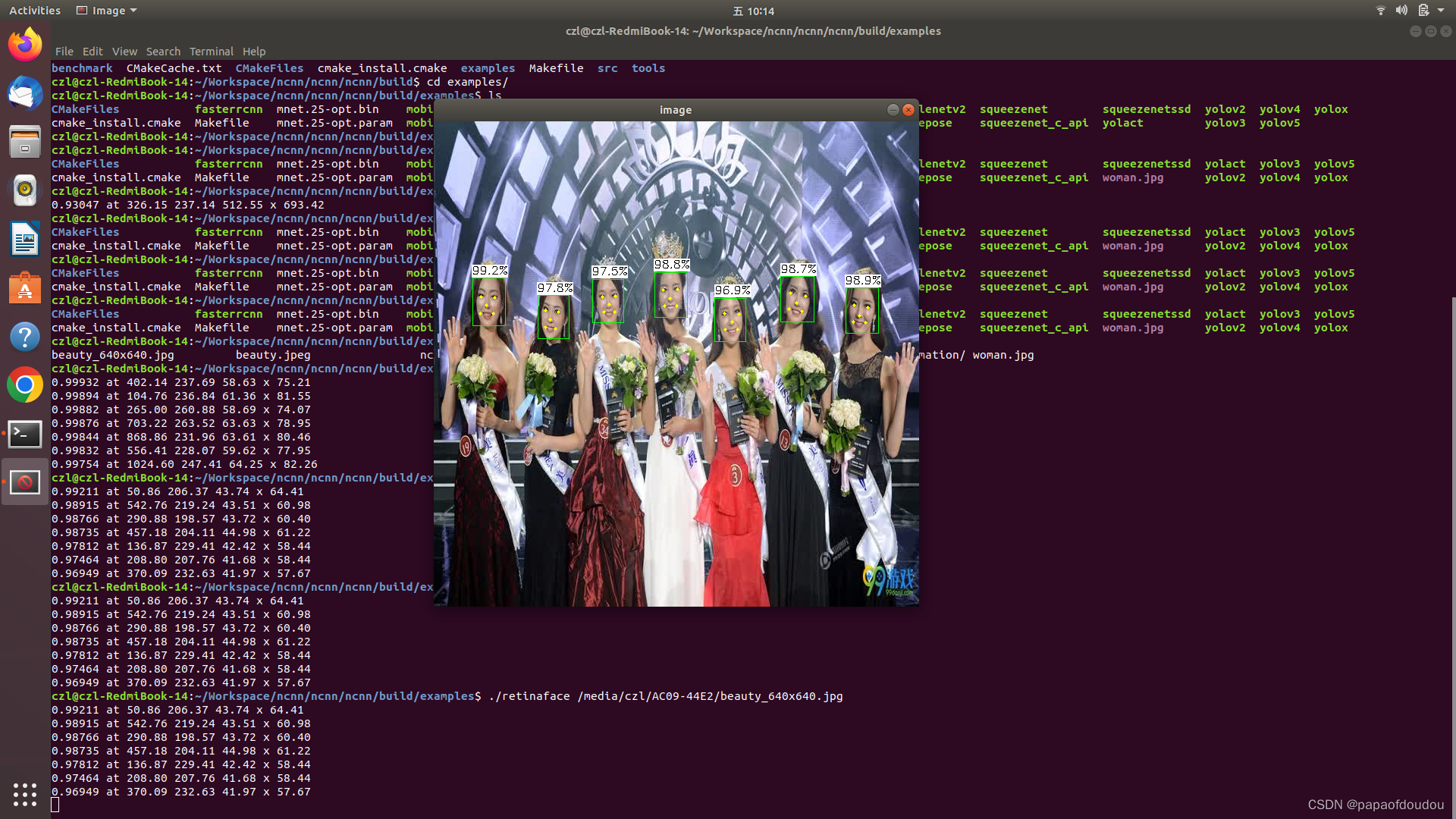
效果很好!
下面是用NCNN YOLOV5用的模型文件,对比一下人脸检测和人形目标检测算法的区别:

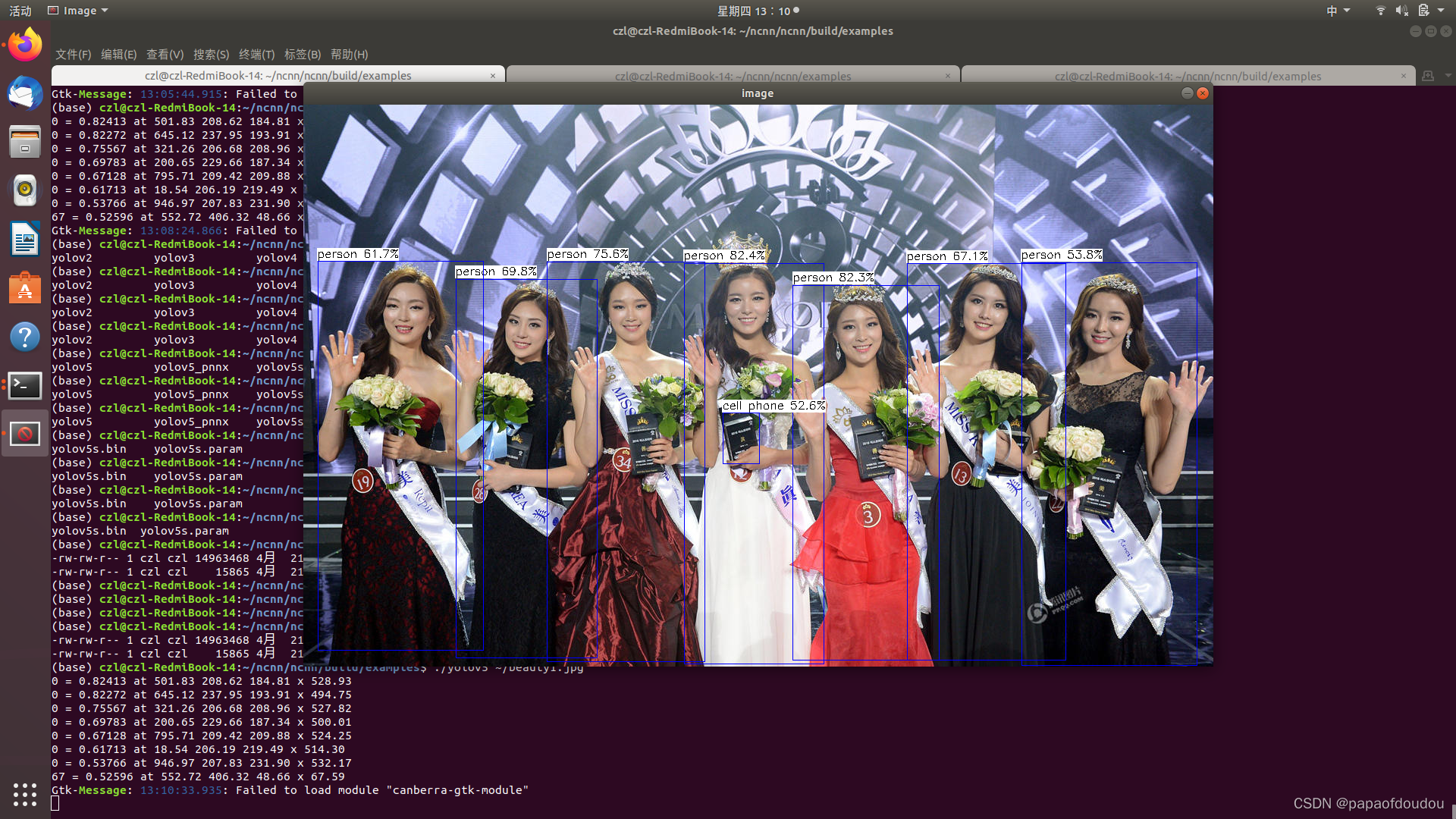
小鲜肉和老腊肉:
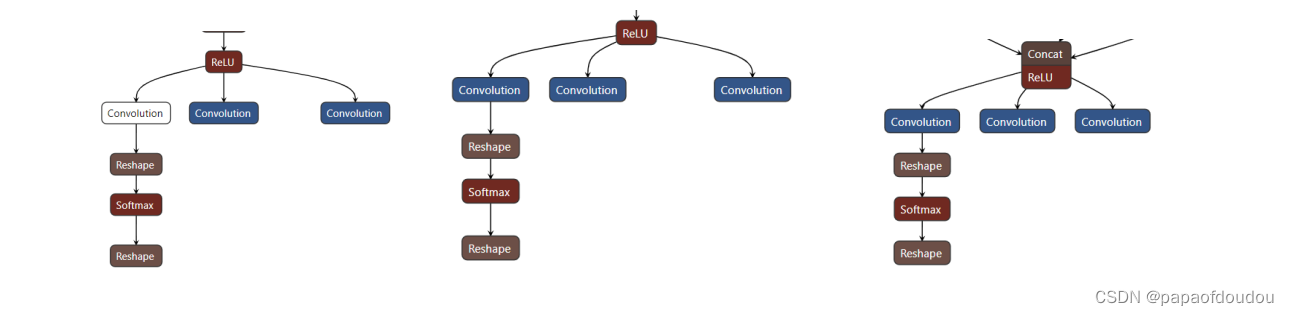
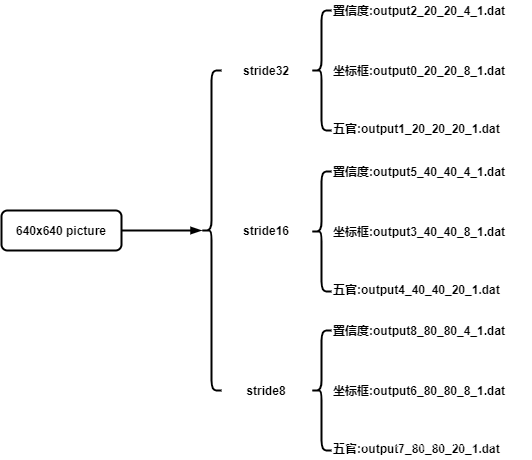
网络分析:
一输入九输出
基于NCNN修改的后处理程序:
// Tencent is pleased to support the open source community by making ncnn available.
//
// Copyright (C) 2019 THL A29 Limited, a Tencent company. All rights reserved.
//
// Licensed under the BSD 3-Clause License (the "License"); you may not use this file except
// in compliance with the License. You may obtain a copy of the License at
//
// https://opensource.org/licenses/BSD-3-Clause
//
// Unless required by applicable law or agreed to in writing, software distributed
// under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR
// CONDITIONS OF ANY KIND, either express or implied. See the License for the
// specific language governing permissions and limitations under the License.
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif
#include <stdio.h>
#include <vector>
#include <vector>
#include <iostream>
using namespace std;
struct FaceObject
{
cv::Rect_<float> rect;
cv::Point2f landmark[5];
float prob;
};
static inline float intersection_area(const FaceObject& a, const FaceObject& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<FaceObject>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<FaceObject>& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<FaceObject>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const FaceObject& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const FaceObject& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
// copy from src/layer/proposal.cpp
static ncnn::Mat generate_anchors(int base_size, const ncnn::Mat& ratios, const ncnn::Mat& scales)
{
int num_ratio = ratios.w;
int num_scale = scales.w;
ncnn::Mat anchors;
anchors.create(4, num_ratio * num_scale);
const float cx = base_size * 0.5f;
const float cy = base_size * 0.5f;
for (int i = 0; i < num_ratio; i++)
{
float ar = ratios[i];
int r_w = round(base_size / sqrt(ar));
int r_h = round(r_w * ar); //round(base_size * sqrt(ar));
for (int j = 0; j < num_scale; j++)
{
float scale = scales[j];
float rs_w = r_w * scale;
float rs_h = r_h * scale;
float* anchor = anchors.row(i * num_scale + j);
anchor[0] = cx - rs_w * 0.5f;
anchor[1] = cy - rs_h * 0.5f;
anchor[2] = cx + rs_w * 0.5f;
anchor[3] = cy + rs_h * 0.5f;
}
}
return anchors;
}
static void generate_proposals(const ncnn::Mat& anchors, int feat_stride, const ncnn::Mat& score_blob, const ncnn::Mat& bbox_blob, const ncnn::Mat& landmark_blob, float prob_threshold, std::vector<FaceObject>& faceobjects)
{
int w = score_blob.w;
int h = score_blob.h;
printf("%s line %d, w %d, h %d.\n", __func__, __LINE__, w, h);
printf("%s line %d, d %d, c %d %d %d step %ld %ld \n", __func__, __LINE__, score_blob.d, score_blob.c, score_blob.dims, score_blob.elempack, score_blob.cstep, score_blob.elemsize);
printf("%s line %d, d %d, c %d %d %d step %ld %ld \n", __func__, __LINE__, bbox_blob.d, bbox_blob.c, bbox_blob.dims, bbox_blob.elempack, bbox_blob.cstep, bbox_blob.elemsize);
printf("%s line %d, d %d, c %d %d %d step %ld %ld \n", __func__, __LINE__, landmark_blob.d, landmark_blob.c, landmark_blob.dims, landmark_blob.elempack, landmark_blob.cstep, landmark_blob.elemsize);
// generate face proposal from bbox deltas and shifted anchors
const int num_anchors = anchors.h;
for (int q = 0; q < num_anchors; q++)
{
const float* anchor = anchors.row(q);
const ncnn::Mat score = score_blob.channel(q + num_anchors);
const ncnn::Mat bbox = bbox_blob.channel_range(q * 4, 4);
const ncnn::Mat landmark = landmark_blob.channel_range(q * 10, 10);
// shifted anchor
float anchor_y = anchor[1];
float anchor_w = anchor[2] - anchor[0];
float anchor_h = anchor[3] - anchor[1];
for (int i = 0; i < h; i++)
{
float anchor_x = anchor[0];
for (int j = 0; j < w; j++)
{
int index = i * w + j;
float prob = score[index];
if (prob >= prob_threshold)
{
// apply center size
float dx = bbox.channel(0)[index];
float dy = bbox.channel(1)[index];
float dw = bbox.channel(2)[index];
float dh = bbox.channel(3)[index];
float cx = anchor_x + anchor_w * 0.5f;
float cy = anchor_y + anchor_h * 0.5f;
float pb_cx = cx + anchor_w * dx;
float pb_cy = cy + anchor_h * dy;
float pb_w = anchor_w * exp(dw);
float pb_h = anchor_h * exp(dh);
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
FaceObject obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0 + 1;
obj.rect.height = y1 - y0 + 1;
obj.landmark[0].x = cx + (anchor_w + 1) * landmark.channel(0)[index];
obj.landmark[0].y = cy + (anchor_h + 1) * landmark.channel(1)[index];
obj.landmark[1].x = cx + (anchor_w + 1) * landmark.channel(2)[index];
obj.landmark[1].y = cy + (anchor_h + 1) * landmark.channel(3)[index];
obj.landmark[2].x = cx + (anchor_w + 1) * landmark.channel(4)[index];
obj.landmark[2].y = cy + (anchor_h + 1) * landmark.channel(5)[index];
obj.landmark[3].x = cx + (anchor_w + 1) * landmark.channel(6)[index];
obj.landmark[3].y = cy + (anchor_h + 1) * landmark.channel(7)[index];
obj.landmark[4].x = cx + (anchor_w + 1) * landmark.channel(8)[index];
obj.landmark[4].y = cy + (anchor_h + 1) * landmark.channel(9)[index];
obj.prob = prob;
faceobjects.push_back(obj);
}
anchor_x += feat_stride;
}
anchor_y += feat_stride;
}
}
}
int get_tensor_data(string file_path, float **data)
{
int len = 0;
static float *memory = NULL;
static int max_len = 10*1024*1024;
if(memory == NULL)
{
memory = (float *)malloc(max_len * sizeof(float));
}
FILE *fp = NULL;
if((fp = fopen(file_path.c_str(), "r")) == NULL)
{
cout << "open tensor file error!" << endl;
exit(-1);
}
int file_len = 0;
while(!feof(fp))
{
fscanf(fp, "%f ", &memory[len ++]);
}
*data = (float *)malloc(len * sizeof(float));
memcpy(*data, memory, len*sizeof(float));
fclose(fp);
if(len == 0 || *data == NULL)
{
cout << " read tensor error happend." << "len:" << len << "data address:" << *data << endl;
exit(-1);
}
printf("len %d.\n", len);
return len;
}
static int detect_retinaface(const cv::Mat& bgr, std::vector<FaceObject>& faceobjects)
{
ncnn::Net retinaface;
retinaface.opt.use_vulkan_compute = true;
// model is converted from
// https://github.com/deepinsight/insightface/tree/master/RetinaFace#retinaface-pretrained-models
// https://github.com/deepinsight/insightface/issues/669
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
// retinaface.load_param("retinaface-R50.param");
// retinaface.load_model("retinaface-R50.bin");
retinaface.load_param("mnet.25-opt.param");
retinaface.load_model("mnet.25-opt.bin");
const float prob_threshold = 0.8f;
const float nms_threshold = 0.4f;
int img_w = bgr.cols;
int img_h = bgr.rows;
ncnn::Mat in = ncnn::Mat::from_pixels(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h);
ncnn::Extractor ex = retinaface.create_extractor();
ex.input("data", in);
std::vector<FaceObject> faceproposals;
float *score0 = (float*)calloc(20*20*4, sizeof(float));
float *bbox0 = (float*)calloc(20*20*8, sizeof(float));
float *landmark0 = (float*)calloc(20*20*20, sizeof(float));
float *score1 = (float*)calloc(40*40*4, sizeof(float));
float *bbox1 = (float*)calloc(40*40*8, sizeof(float));
float *landmark1 = (float*)calloc(40*40*20, sizeof(float));
float *score2 = (float*)calloc(80*80*4, sizeof(float));
float *bbox2 = (float*)calloc(80*80*8, sizeof(float));
float *landmark2 = (float*)calloc(80*80*20, sizeof(float));
get_tensor_data("./iter_0_output_212_out0_1_4_20_20.tensor", &score0);
get_tensor_data("./iter_0_output_210_out0_1_8_20_20.tensor", &bbox0);
get_tensor_data("./iter_0_output_211_out0_1_20_20_20.tensor", &landmark0);
get_tensor_data("./iter_0_output_215_out0_1_4_40_40.tensor", &score1);
get_tensor_data("./iter_0_output_213_out0_1_8_40_40.tensor", &bbox1);
get_tensor_data("./iter_0_output_214_out0_1_20_40_40.tensor", &landmark1);
get_tensor_data("./iter_0_output_218_out0_1_4_80_80.tensor", &score2);
get_tensor_data("./iter_0_output_216_out0_1_8_80_80.tensor", &bbox2);
get_tensor_data("./iter_0_output_217_out0_1_20_80_80.tensor", &landmark2);
// stride 32
{
ncnn::Mat score_blob(20*20*4), bbox_blob(20*20*8), landmark_blob(20*20*20);
#if 0
ex.extract("face_rpn_cls_prob_reshape_stride32", score_blob);
ex.extract("face_rpn_bbox_pred_stride32", bbox_blob);
ex.extract("face_rpn_landmark_pred_stride32", landmark_blob);
#else
int j = 0;
for(j = 0; j < 20*20*4; j ++) score_blob[j] = score0[j];
for(j = 0; j < 20*20*8; j ++) bbox_blob[j] = bbox0[j];
for(j = 0; j < 20*20*20; j ++) landmark_blob[j] = landmark0[j];
score_blob.w = score_blob.h = bbox_blob.w = bbox_blob.h = landmark_blob.w = landmark_blob.h = 20;
score_blob.d = 1;
bbox_blob.d = 1;
landmark_blob.d = 1;
score_blob.c = 4;
bbox_blob.c = 8;
landmark_blob.c = 20;
score_blob.dims = 3;
bbox_blob.dims = 3;
landmark_blob.dims = 3;
score_blob.elempack = 1;
bbox_blob.elempack = 1;
landmark_blob.elempack = 1;
score_blob.cstep = 400;
bbox_blob.cstep = 400;
landmark_blob.cstep = 400;
landmark_blob.elemsize = bbox_blob.elemsize = score_blob.elemsize = 4;
free(score0);
free(bbox0);
free(landmark0);
#endif
const int base_size = 16;
const int feat_stride = 32;
ncnn::Mat ratios(1);
ratios[0] = 1.f;
ncnn::Mat scales(2);
scales[0] = 32.f;
scales[1] = 16.f;
ncnn::Mat anchors = generate_anchors(base_size, ratios, scales);
std::vector<FaceObject> faceobjects32;
generate_proposals(anchors, feat_stride, score_blob, bbox_blob, landmark_blob, prob_threshold, faceobjects32);
faceproposals.insert(faceproposals.end(), faceobjects32.begin(), faceobjects32.end());
}
// stride 16
{
ncnn::Mat score_blob(40*40*4), bbox_blob(40*40*8), landmark_blob(40*40*20);
#if 0
ex.extract("face_rpn_cls_prob_reshape_stride16", score_blob);
ex.extract("face_rpn_bbox_pred_stride16", bbox_blob);
ex.extract("face_rpn_landmark_pred_stride16", landmark_blob);
#else
int j = 0;
for(j = 0; j < 40*40*4; j ++) score_blob[j] = score1[j];
for(j = 0; j < 40*40*8; j ++) bbox_blob[j] = bbox1[j];
for(j = 0; j < 40*40*20; j ++) landmark_blob[j] = landmark1[j];
score_blob.w = score_blob.h = bbox_blob.w = bbox_blob.h = landmark_blob.w = landmark_blob.h = 40;
score_blob.d = 1;
bbox_blob.d = 1;
landmark_blob.d = 1;
score_blob.c = 4;
bbox_blob.c = 8;
landmark_blob.c = 20;
free(score1);
free(bbox1);
free(landmark1);
score_blob.dims = 3;
bbox_blob.dims = 3;
landmark_blob.dims = 3;
score_blob.elempack = 1;
bbox_blob.elempack = 1;
landmark_blob.elempack = 1;
score_blob.cstep = 1600;
bbox_blob.cstep = 1600;
landmark_blob.cstep = 1600;
landmark_blob.elemsize = bbox_blob.elemsize = score_blob.elemsize = 4;
#endif
const int base_size = 16;
const int feat_stride = 16;
ncnn::Mat ratios(1);
ratios[0] = 1.f;
ncnn::Mat scales(2);
scales[0] = 8.f;
scales[1] = 4.f;
ncnn::Mat anchors = generate_anchors(base_size, ratios, scales);
std::vector<FaceObject> faceobjects16;
generate_proposals(anchors, feat_stride, score_blob, bbox_blob, landmark_blob, prob_threshold, faceobjects16);
faceproposals.insert(faceproposals.end(), faceobjects16.begin(), faceobjects16.end());
}
// stride 8
{
ncnn::Mat score_blob(80*80*4), bbox_blob(80*80*8), landmark_blob(80*80*20);
#if 0
ex.extract("face_rpn_cls_prob_reshape_stride8", score_blob);
ex.extract("face_rpn_bbox_pred_stride8", bbox_blob);
ex.extract("face_rpn_landmark_pred_stride8", landmark_blob);
#else
int j = 0;
for(j = 0; j < 80*80*4; j ++) score_blob[j] = score2[j];
for(j = 0; j < 80*80*8; j ++) bbox_blob[j] = bbox2[j];
for(j = 0; j < 80*80*20; j ++) landmark_blob[j] = landmark2[j];
score_blob.w = score_blob.h = bbox_blob.w = bbox_blob.h = landmark_blob.w = landmark_blob.h = 80;
score_blob.d = 1;
bbox_blob.d = 1;
landmark_blob.d = 1;
score_blob.c = 4;
bbox_blob.c = 8;
landmark_blob.c = 20;
free(score2);
free(bbox2);
free(landmark2);
score_blob.dims = 3;
bbox_blob.dims = 3;
landmark_blob.dims = 3;
score_blob.elempack = 1;
bbox_blob.elempack = 1;
landmark_blob.elempack = 1;
score_blob.cstep = 6400;
bbox_blob.cstep = 6400;
landmark_blob.cstep = 6400;
landmark_blob.elemsize = bbox_blob.elemsize = score_blob.elemsize = 4;
#endif
const int base_size = 16;
const int feat_stride = 8;
ncnn::Mat ratios(1);
ratios[0] = 1.f;
ncnn::Mat scales(2);
scales[0] = 2.f;
scales[1] = 1.f;
ncnn::Mat anchors = generate_anchors(base_size, ratios, scales);
std::vector<FaceObject> faceobjects8;
generate_proposals(anchors, feat_stride, score_blob, bbox_blob, landmark_blob, prob_threshold, faceobjects8);
faceproposals.insert(faceproposals.end(), faceobjects8.begin(), faceobjects8.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(faceproposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(faceproposals, picked, nms_threshold);
int face_count = picked.size();
faceobjects.resize(face_count);
for (int i = 0; i < face_count; i++)
{
faceobjects[i] = faceproposals[picked[i]];
// clip to image size
float x0 = faceobjects[i].rect.x;
float y0 = faceobjects[i].rect.y;
float x1 = x0 + faceobjects[i].rect.width;
float y1 = y0 + faceobjects[i].rect.height;
x0 = std::max(std::min(x0, (float)img_w - 1), 0.f);
y0 = std::max(std::min(y0, (float)img_h - 1), 0.f);
x1 = std::max(std::min(x1, (float)img_w - 1), 0.f);
y1 = std::max(std::min(y1, (float)img_h - 1), 0.f);
faceobjects[i].rect.x = x0;
faceobjects[i].rect.y = y0;
faceobjects[i].rect.width = x1 - x0;
faceobjects[i].rect.height = y1 - y0;
}
return 0;
}
static void draw_faceobjects(const cv::Mat& bgr, const std::vector<FaceObject>& faceobjects)
{
cv::Mat image = bgr.clone();
for (size_t i = 0; i < faceobjects.size(); i++)
{
const FaceObject& obj = faceobjects[i];
fprintf(stderr, "%.5f at %.2f %.2f %.2f x %.2f\n", obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(0, 255, 0));
cv::circle(image, obj.landmark[0], 2, cv::Scalar(0, 255, 255), -1);
cv::circle(image, obj.landmark[1], 2, cv::Scalar(0, 255, 255), -1);
cv::circle(image, obj.landmark[2], 2, cv::Scalar(0, 255, 255), -1);
cv::circle(image, obj.landmark[3], 2, cv::Scalar(0, 255, 255), -1);
cv::circle(image, obj.landmark[4], 2, cv::Scalar(0, 255, 255), -1);
char text[256];
sprintf(text, "%.1f%%", obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imshow("image", image);
cv::waitKey(0);
}
int main(int argc, char** argv)
{
if (argc != 2)
{
fprintf(stderr, "Usage: %s [imagepath]\n", argv[0]);
return -1;
}
const char* imagepath = argv[1];
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty())
{
fprintf(stderr, "cv::imread %s failed\n", imagepath);
return -1;
}
std::vector<FaceObject> faceobjects;
detect_retinaface(m, faceobjects);
draw_faceobjects(m, faceobjects);
return 0;
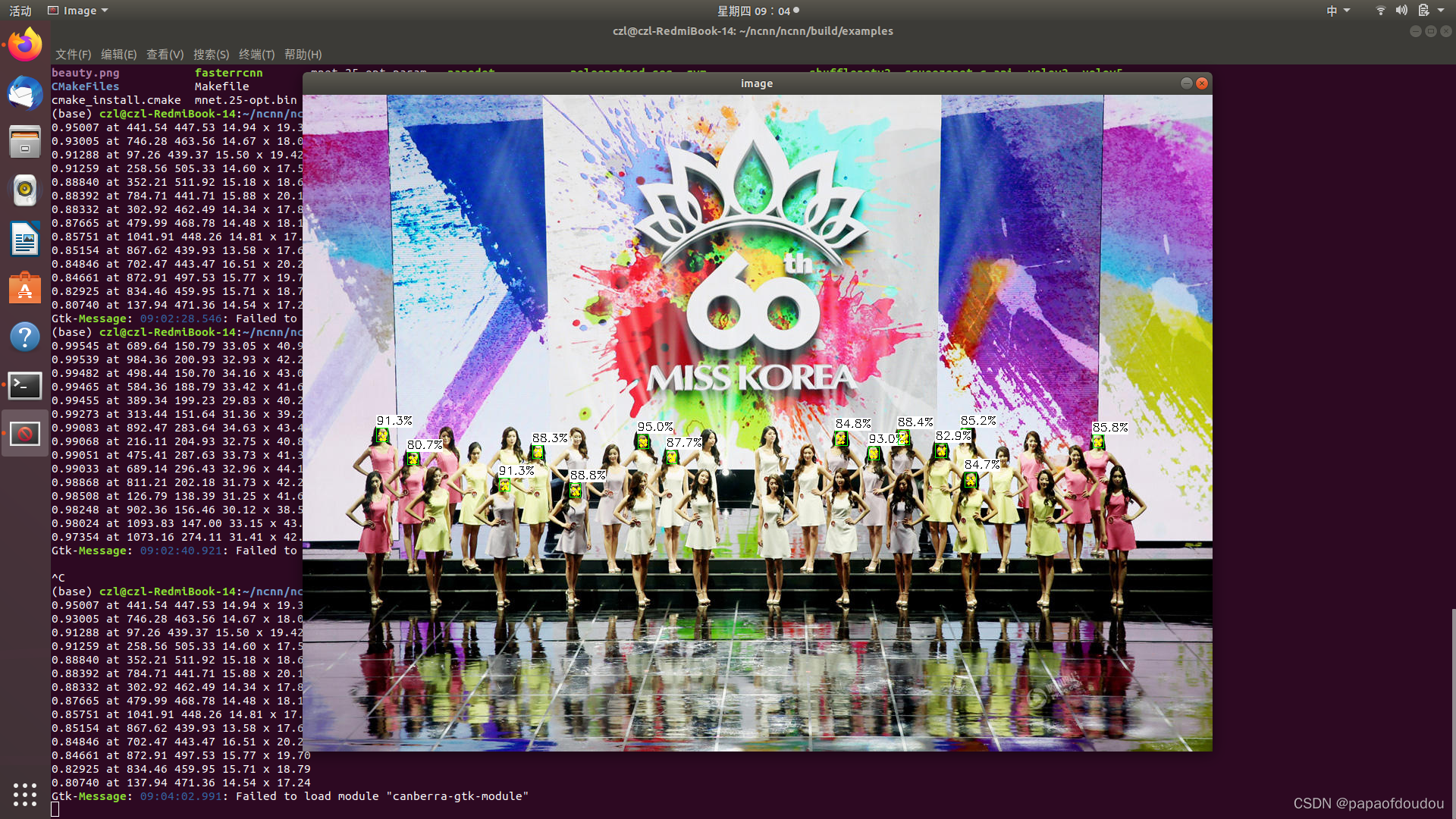
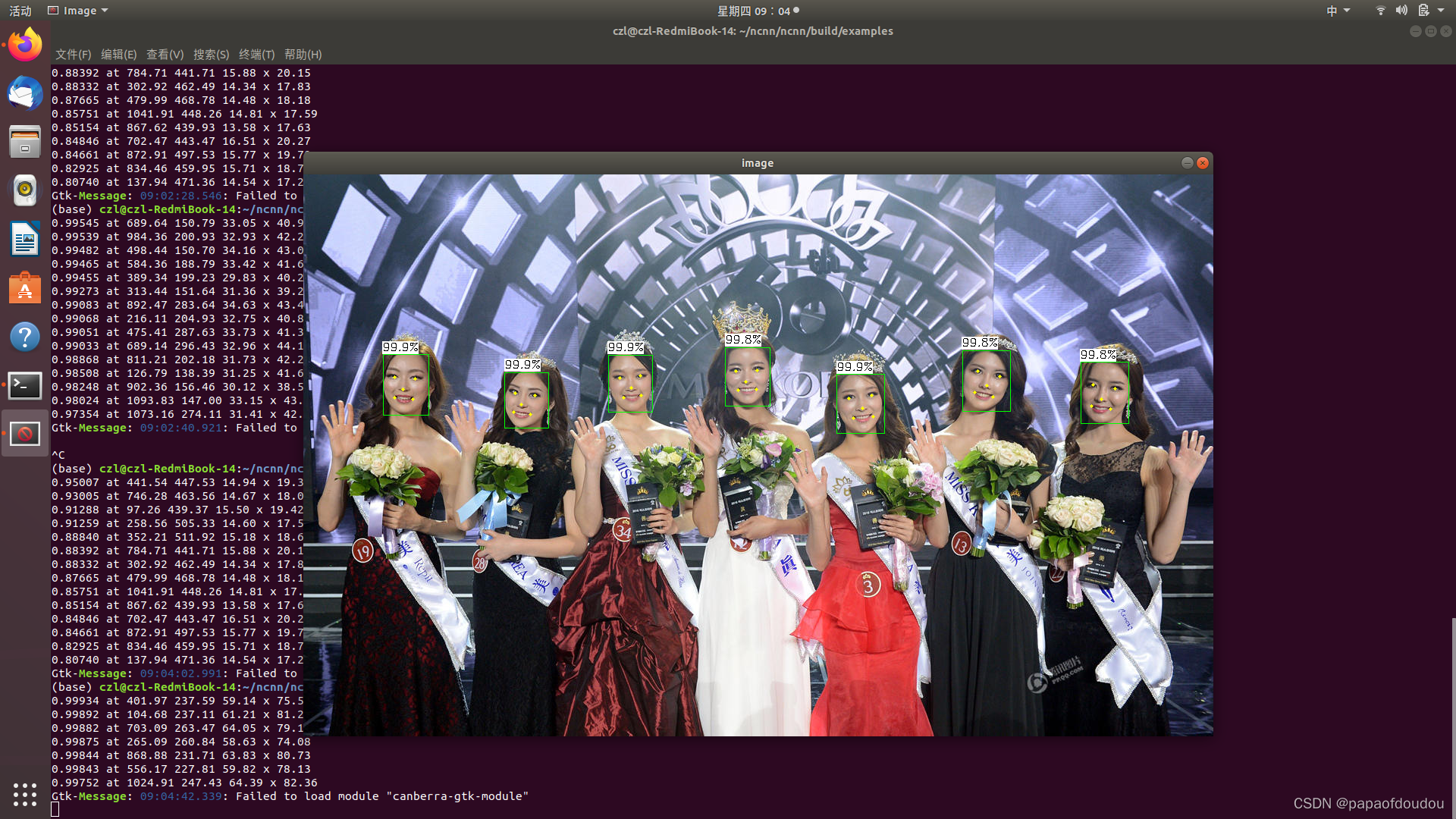
}在推理芯原工具inference出的tensor的时候遇到问题,只找到了三位美女的脸和五官,问题待查.
部署自己YOLOV5S
参考下面博客将yolov5s.pt转换为ONNX格式.
pytorch yolov5 推理和训练环境搭建_papaofdoudou的博客-优快云博客
下一步将onnx格式转换为NCNN格式:

参考资料
GitHub - wzj5133329/retinaface_caffe: 完整版caffe-cpp实现



















 2万+
2万+




 到【灌水乐园】发言
到【灌水乐园】发言









