







在上一章节中我们编辑turtlemimic.launch文件时采用的gedit命令进入文件编辑器,但是由于在我们想要快速的找到文件并对文件进行编辑,使用gedit命令需要输入复杂的文件路径,因此,为了提高我们编辑程序包中文件的效率,通常会使用rosed命令进行编辑。
通俗的讲就是:使用rosed命令可以快速的找到文件并进行编辑,是提高我们效率的工具!!!
----------------------------------------------------------------------------------------------------
rosed没有什么复杂的命令,ok,我们直接进入实操环节喽~~~
首先,还是像往常一样,开张婚姻介绍所master,先设置环境变量,再打开roscore。
source catkin_ws/devel/setup.bash
roscore
再按住ctrl+ALT+T打开另一个终端,并设置环境变量,并下载vim编辑器
source catkin_ws/devel/setup.bash
sudo apt-get install vim等待下载完成后,输入rosed编辑命令
rosed test_pkg turtlemmimic.launch在ros窗口上直接显示如下所示:
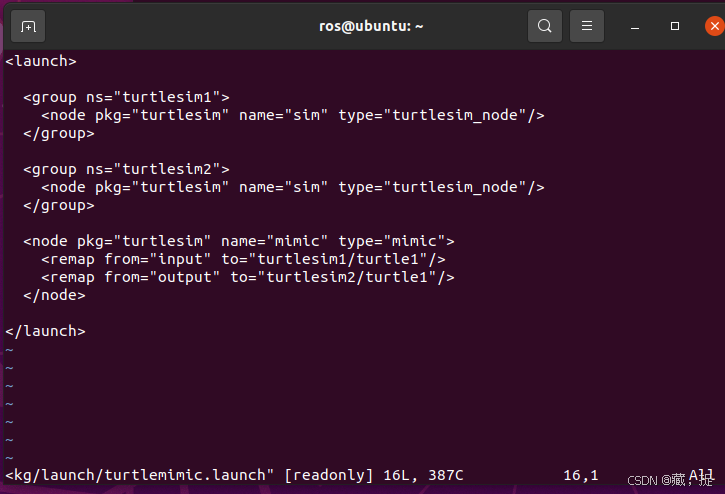 在vim编辑器中,常用的命令有
在vim编辑器中,常用的命令有
| :wq | 保存并退出 |
| :q! | 不保存直接退出 |
| i | 进入编辑模式 |
| esc | 退出编辑模式 |
至此,你已经理解了rosed编辑的意义和作用并且能够在实操中使用rosed啦!!!(●ˇ∀ˇ●)

















 100
100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









