






仅供参考。
软件与版本主要是:visual studio community 2019和pcl1.8.1-msvc2017
链接:https://pan.baidu.com/s/1h920zn8PrfgCufDuRa6yHg
提取码:1crw
首先声明:文件里包含了pcl-1.8.1-pdb-msvc2017-win64和PCL-1.8.1-AllInOne-msvc2017-win64,如果想根据安装包配置环境,请参考其他博主。此教程只需要将环境变量复制到电脑的Path环境变量中,配置文件解压到D:盘下,在VS中创建项目文件并导入属性表即可成功运行。接下来详细教程如下:
网盘下载包含如下文件:
环境变量:电脑Path下的环境变量路径
pcl-1.8.1-pdb-msvc2017-win64:pcl官方1.8.1 release版本,对应vs2017及以后
PCL-1.8.1-AllInOne-msvc2017-win64:官方1.8.1 pdb文件
(重)Program File:需要解压的打包文件,包含源安装包解压文件、opencv文件和debug、release的配置属性表。
--------------------------------------------------------------分割线---------------------------------------------------------
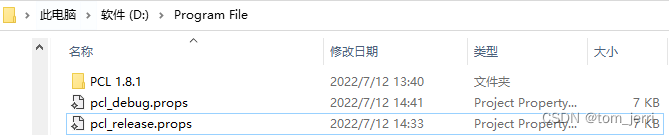
1、将Program File(非Files主要和其他软件位置区分开)下载解压到D:盘下(配置时懒得改相对路径,如果有需要请自己改,否则一定要在D盘才可以),文件夹形式严格按:D:\Program File\PCL 1.8.1.......
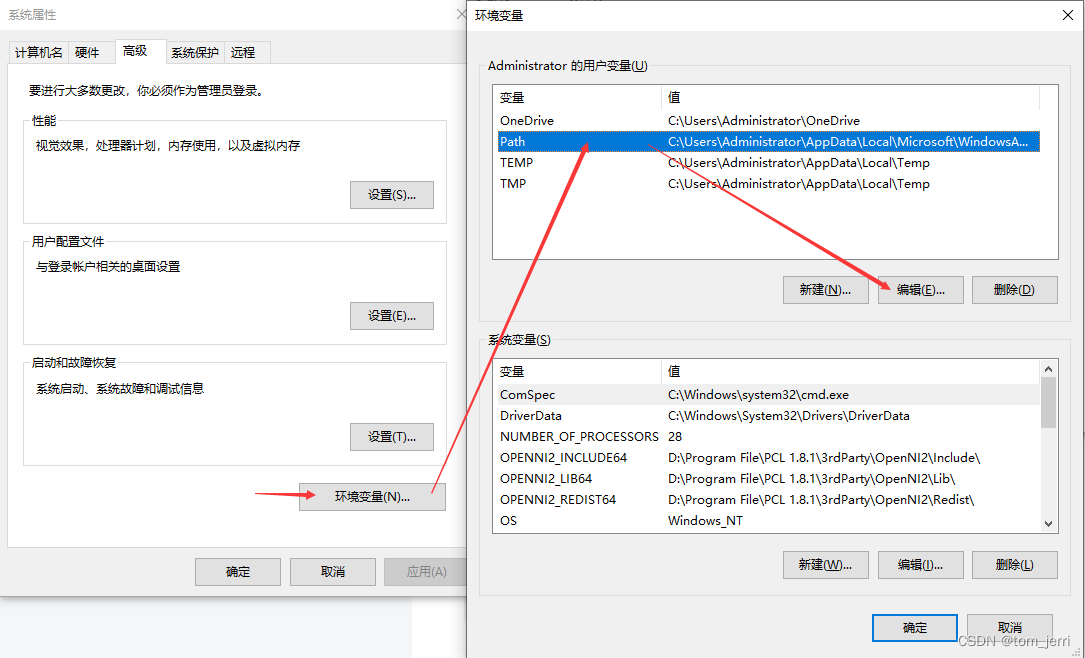
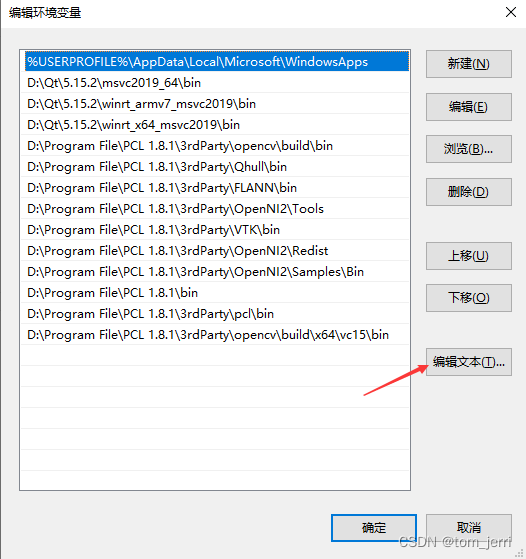
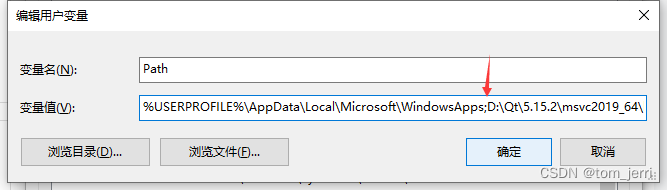
2、将环境变量.txt中的环境变量复制粘贴到电脑的 高级系统设置/环境变量/Path 中,选择 编辑文本,将复制内容添加到变量值后面(与系统变量一定要用英文格式的 “;” 隔开),查看环境变量如下图所示则成功:
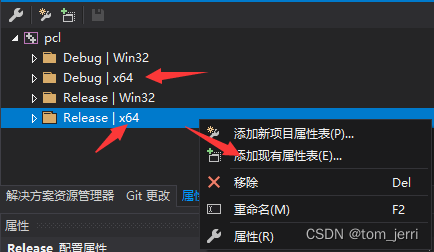
3、新建vs c++空项目,在属性管理器中(如没有在 视图/其他窗口/资源管理器 中添加),分别在Debug|x64和Release|x64文件夹中右键点击 添加现有属性表 ,将Program File文件夹下的pcl_debug.props和pcl_release.props属性表分别添加进Debug和Release中(此处建议将属性表多备份几个,以免在后面修改的时候错了用不了,或者以后修改在此处添加新的属性表配置其他环境):
到此,pcl的环境已经配置完成,将调试环境设置x64即可,测试代码贴出(代码参考博主https://www.youkuaiyun.com/tags/NtzaAgwsOTQwMzEtYmxvZwO0O0OO0O0O.html):
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char** argv) {
std::cout << "Test PCL !" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05) {
for (float angle(0.0); angle <= 360.0; angle += 5.0) {
pcl::PointXYZRGB point;
point.x = 0.5 * cosf(pcl::deg2rad(angle));
point.y = sinf(pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 | static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0) {
r -= 12;
g += 12;
}
else {
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int)point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()) {};
return 0;
}
--------------------------------------------------------------分割线---------------------------------------------------------

















 1608
1608

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









