



知识库不是文件的堆积,而是组织的核心资产。不仅要避免因为文档错误而导致项目出现问题,还要减少后续的维护成本,让知识库真正成为团队资产而不是负担。文档评审是守护这份资产质量的“守门员”。
1、开启评审
创建知识库时(以公共知识库为例),知识库的评审是关闭状态,此时任何人添加的文档,系统成员都是可见的。
若想只有通过评审的文档才能被系统成员看见,可以在知识库设置->评审模块中,开启评审功能。
 开启评审
开启评审
开启评审功能后,知识库成员创建文档,在未提交评审之前,文档的状态为草稿,此时知识库其他成员对此文档不可见。
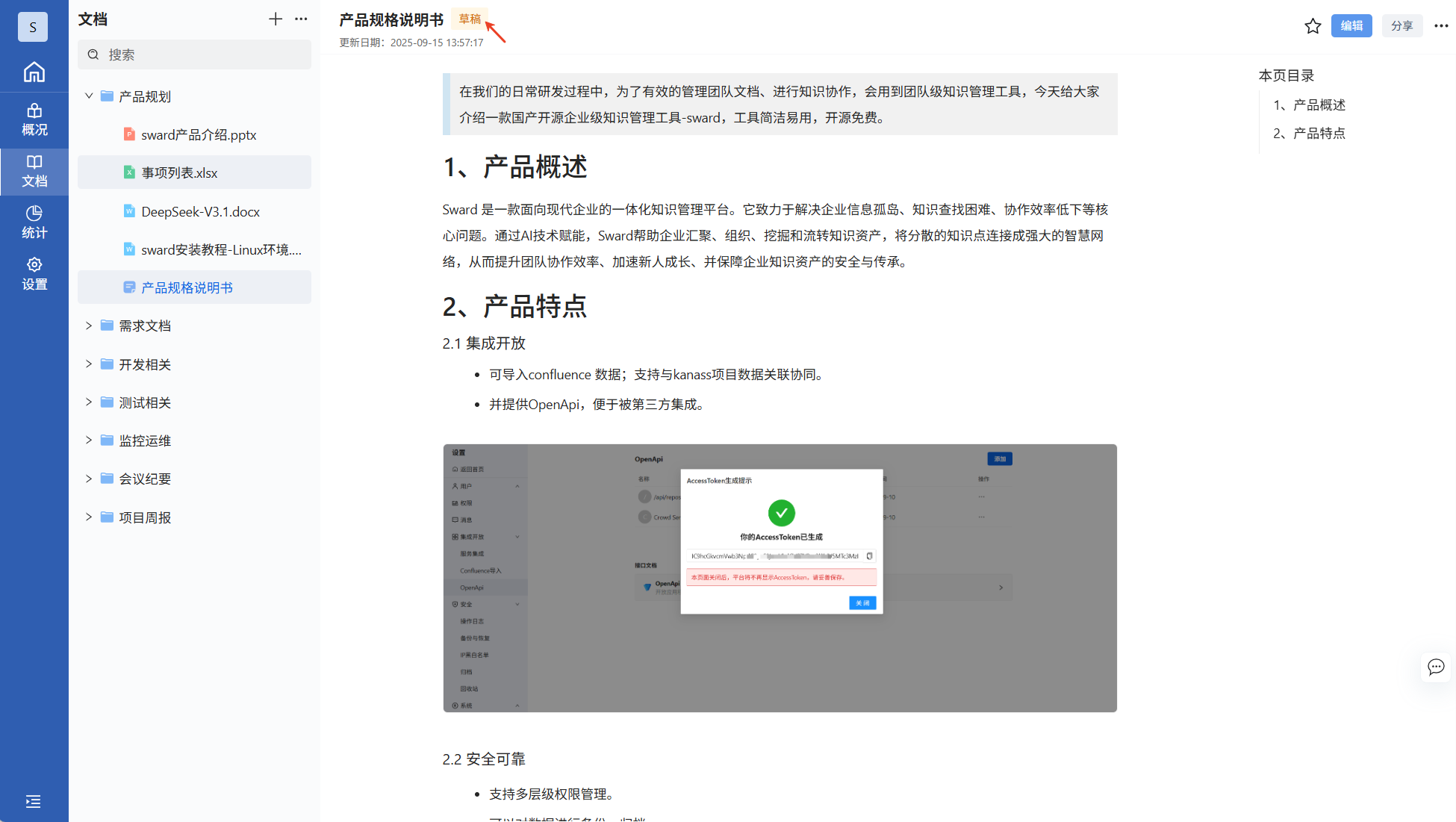 草稿状态
草稿状态
2、提交评审
2.1 添加文档
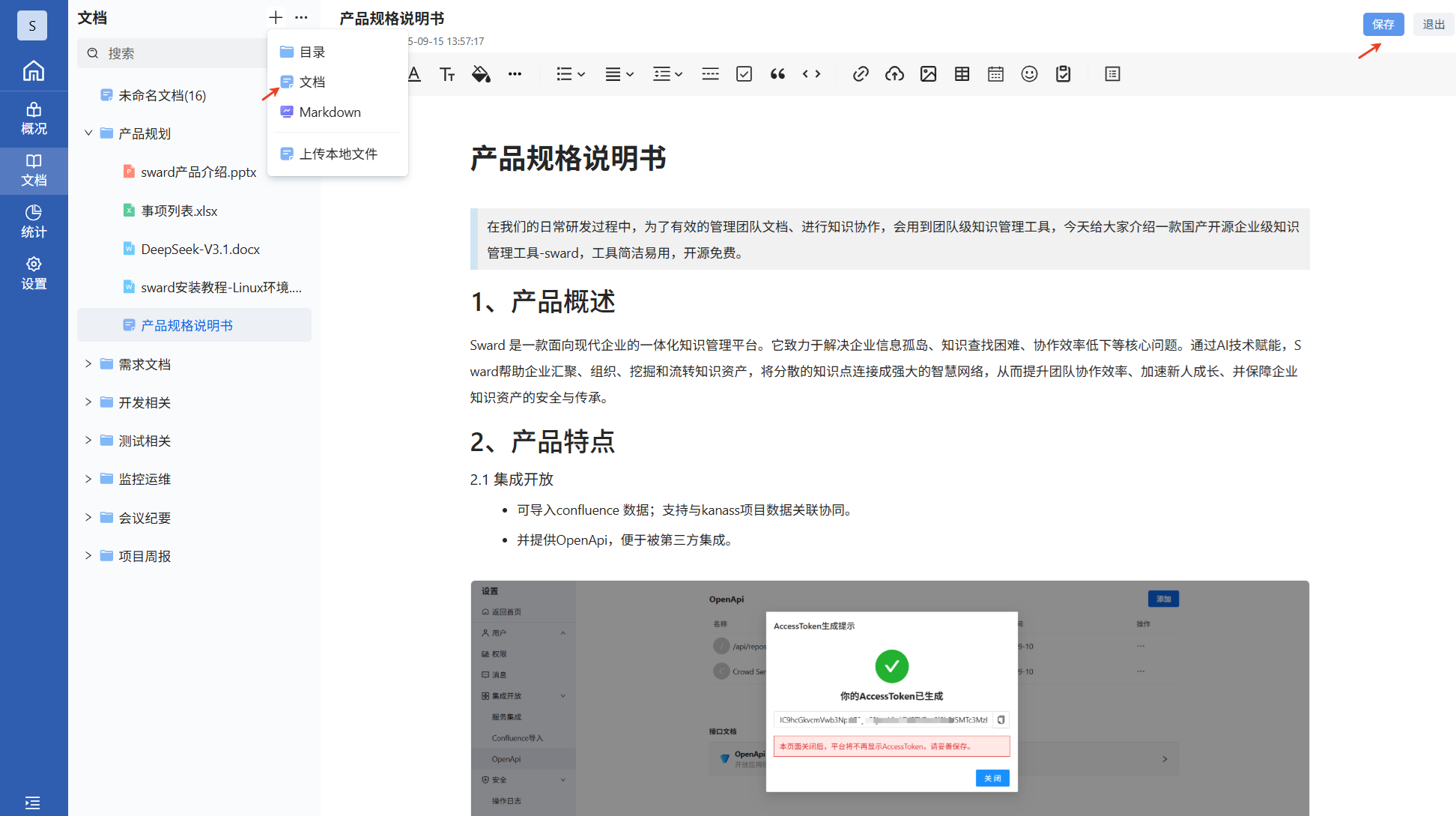
进入知识库文档模块,点击“+”添加文档。填写标题和正文后,分别点击“保存”和“退出”按钮。此时出现更多功能按钮“...”。
 添加文档
添加文档
2.2 单文件提交评审
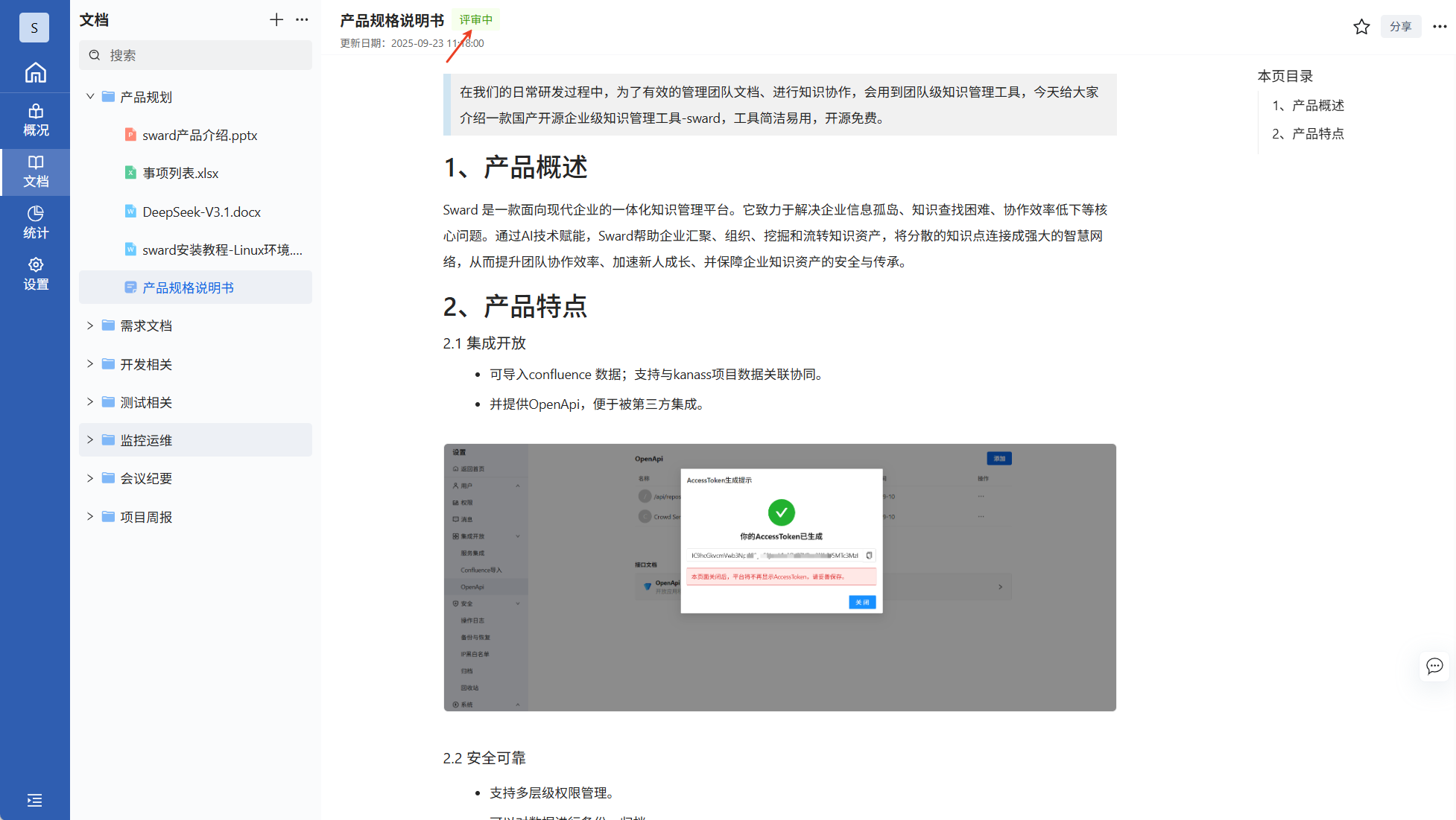
点击文档的更多->提交评审->输入评审名称和评审人->确定。评审提交成功。此时文档的状态由“草稿”变成“评审中”
 提交评审
提交评审
属性说明
| 属性 | 说明 |
| 名称 | 为提交的评审添加一个名称 |
| 评审人 | 希望此次评审,由谁来进行评审 |
| 确定 | 点击确定后,评审提交成功,文档由草稿状态变为评审中 |
 文档评审中
文档评审中
2.3 批量提交评审
进入知识库设置->评审->添加评审,填写好名字和评审人后点击下一步即可添加需要评审的文档。
 批量添加评审
批量添加评审
属性说明
| 属性 | 说明 |
| 仅保存 | 保存评审单,评审单状态为待发布。评审人登录后看不到评审单 |
| 保存并发布 | 评审单状态为待评审。此时评审人登录后可以查看到评审单并进行评审 |
| 添加 | 可以为当前评审单添加需要评审的文档。不可以重复添加 |
| 上一步 | 返回上一步,重新修改名称及评审人 |
3、撤销评审
已经提交,但还未完成的评审,可以点击撤销。
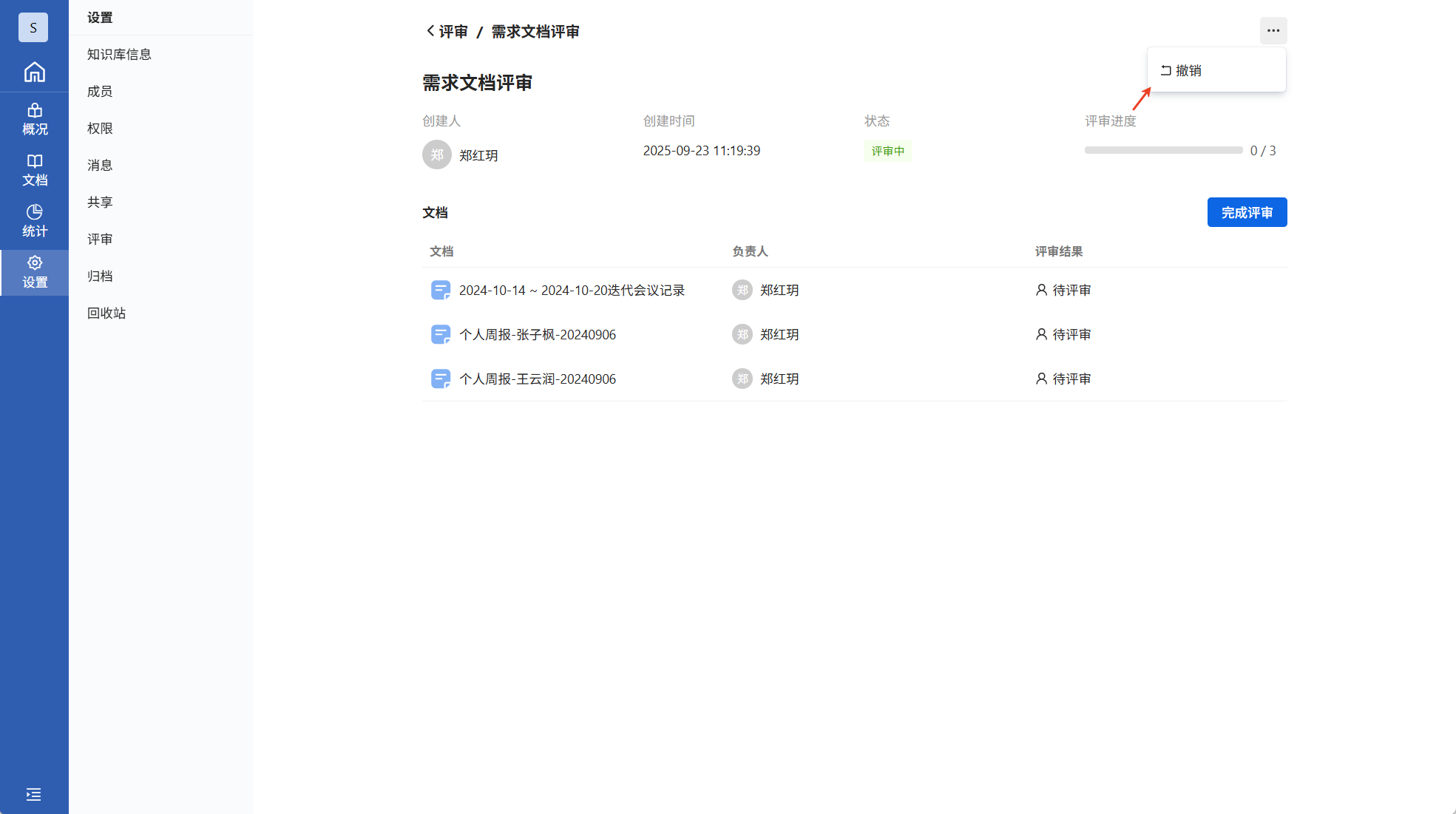 撤销评审
撤销评审
4、评审人评审文档
评审人登录系统后,可以在系统的概览页面,或者知识库的评审页面,看到自己的待评审。点击评审单名称进入评审页面。
4.1 评审过程
点击文档名称,可以预览文档内容
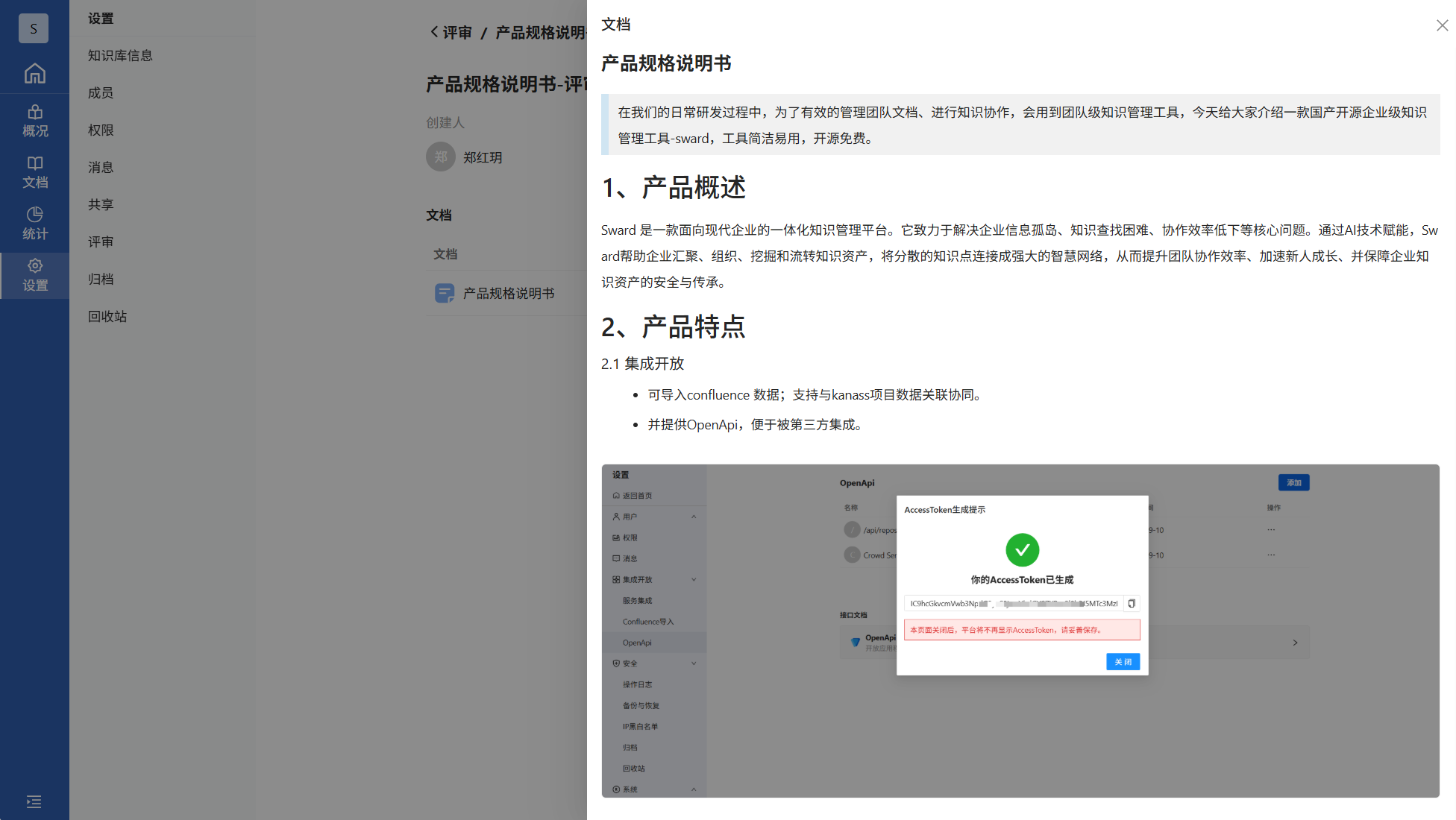 文档预览
文档预览
点击评审结果下的“待评审”,打开评审页面,输入评审意见并点击通过/不通过。当前文档评审成功。
 文档评审
文档评审
注意:评审后,评审状态无法再次修改,但评审意见可以继续编辑。
 修改评审意见
修改评审意见
4.2 评审通过
文档评审通过后,文档会自动上线,系统成员可以查看到此文档
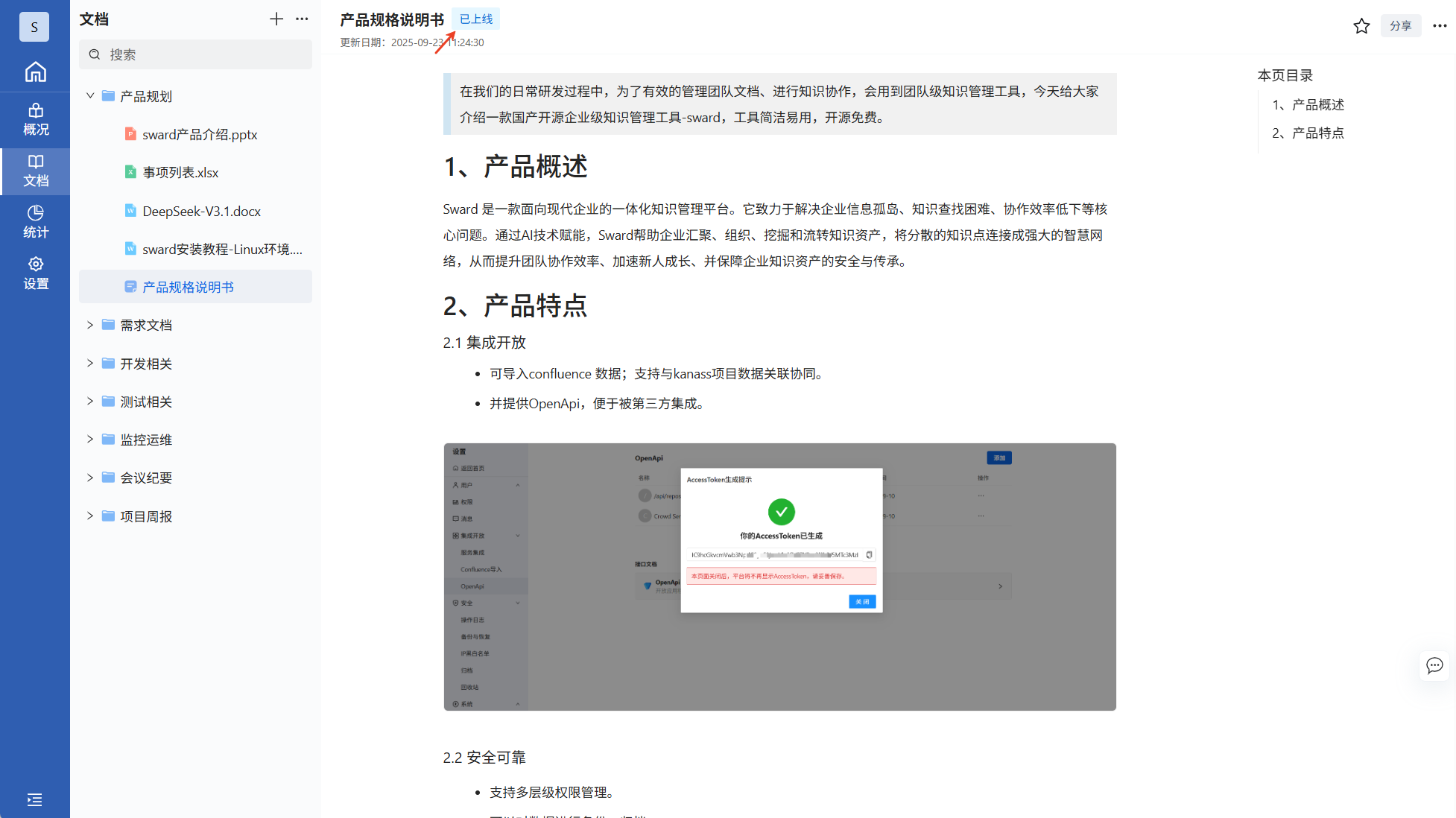 评审通过
评审通过
若此时想继续编辑已上线文档,可以点击更多按钮中的“下线”。下线文档变成草稿状态,修改之后再次提评审。
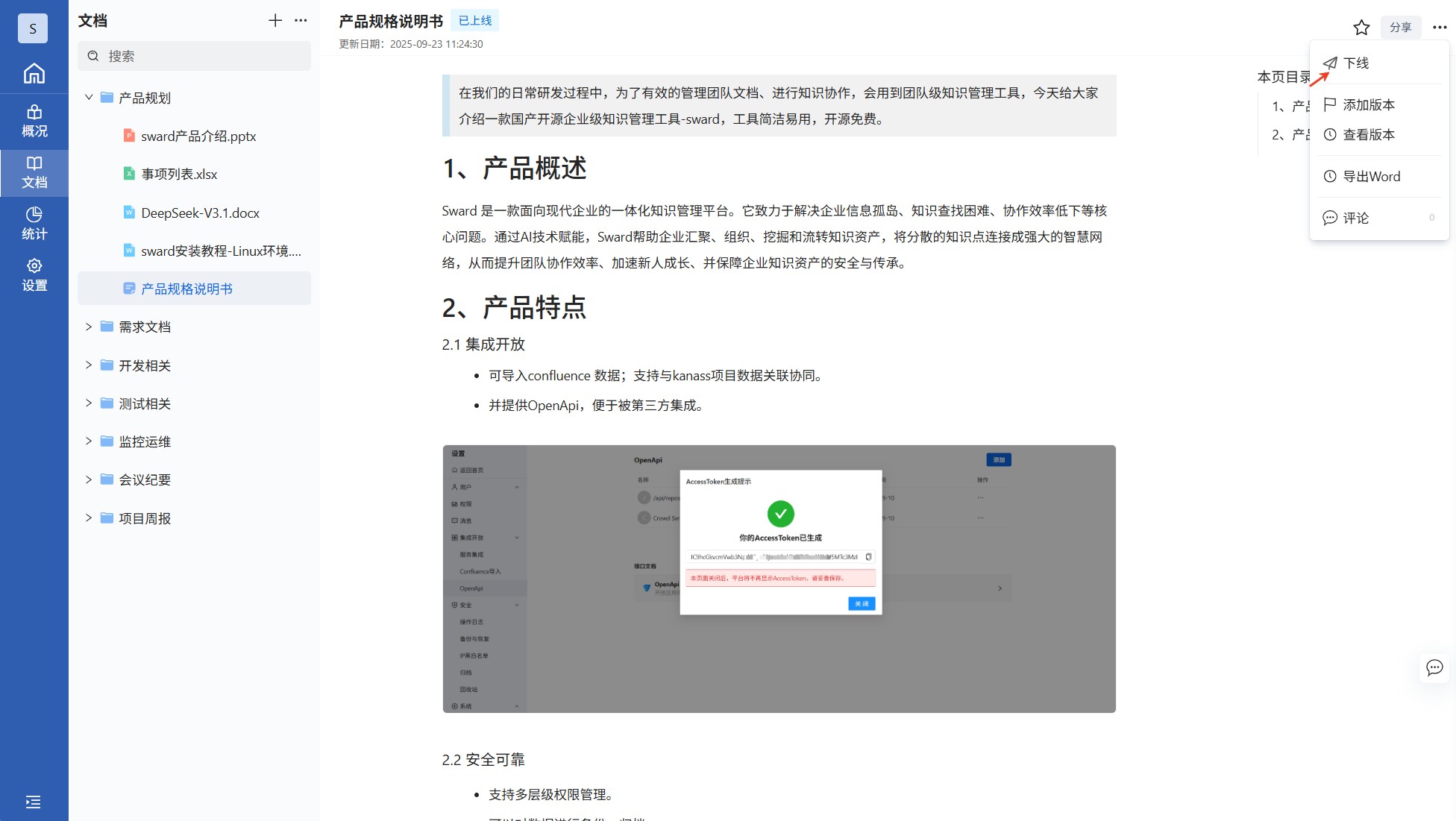 文档下线
文档下线
4.3 评审不通过
文档评审不通过后,文档状态仍为草稿,需要文档编写人继续修改后再次提交评审
 评审不通过
评审不通过

















 318
318

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









