



知识管理工具的核心使命是让知识被高效利用和创造价值,而文档分享功能正是实现这一目标的关键。它打破了信息的访问壁垒,使得知识能跨越团队、部门进行流动。通过可控的分享既能保障知识安全,又能确保正确的信息在需要时能快速传递给正确的人,本文将详细介绍在使用sward的过程中如何快速地分享你创作的文档。
1、文档分享
sward支持富文本文档分享、markdown分享、上传的本地文件分享以及目录的分享。下面以文档分享为例,详细介绍分享功能。
点击文档后的更多按钮->分享,可以选择外部分享或者知识库内分享
 分享
分享
1.1 外部分享
当选择外部分享时,访问密码下拉框,可以选择无密码访问和密码访问。
 密码分享
密码分享
| 属性 | 说明 |
| 无密码访问 | 直接点击生成链接,将链接发送给被分享人。被分享人无需输入密码可以直接打开链接查看文档 |
| 密码访问 | 选择密码访问后,系统会自动生成一个密码,将链接发送给被分享人后,被分享人需要输入密码才能查看到文档 |
1.2 知识库内部分享
选择知识库内分享后,选择人员并点击生成链接。链接只有被选择为访问人的用户才可以登录并查看。其他人员打开链接时会显示无权限查看。
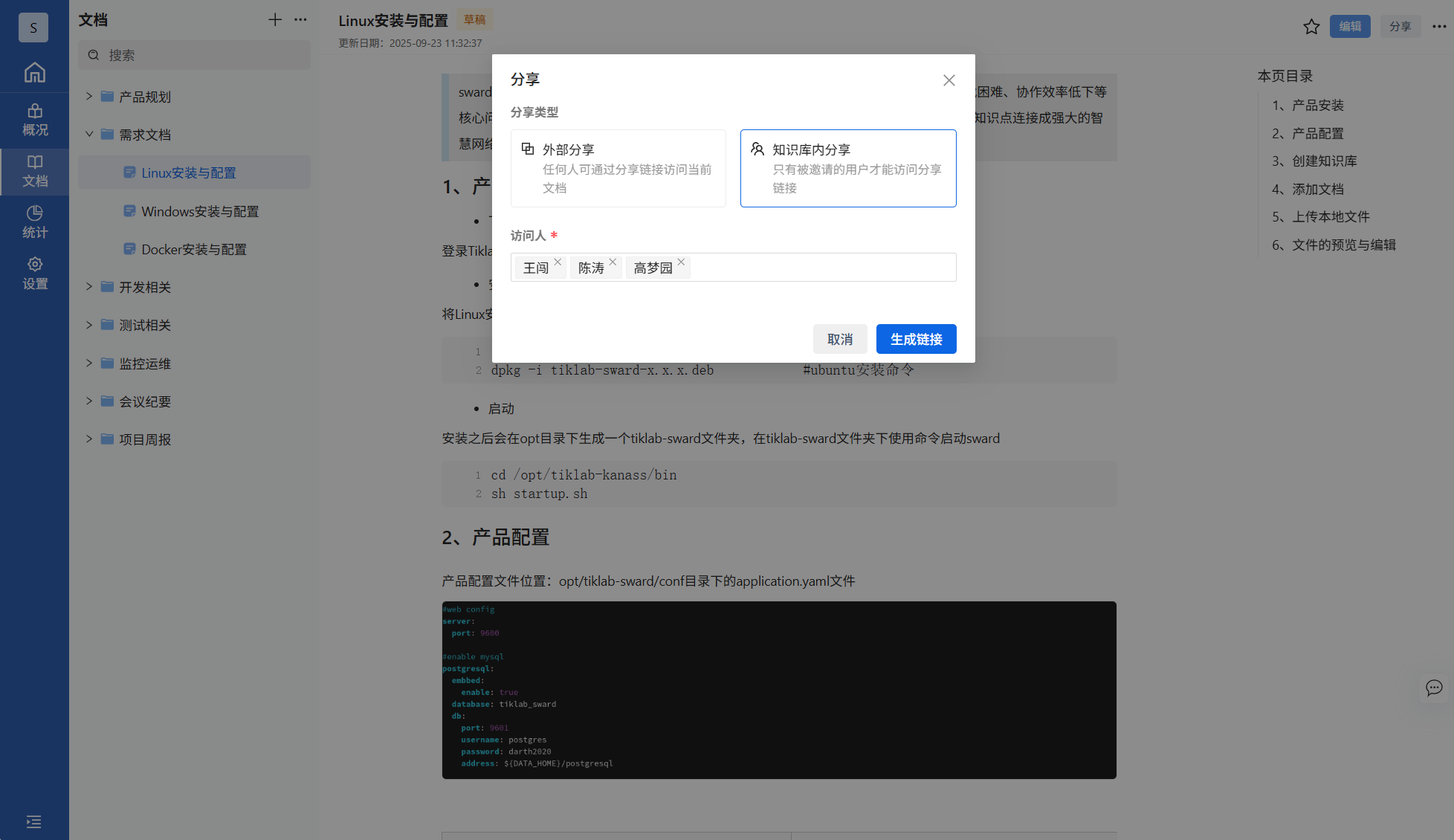 知识库内分享
知识库内分享
2、查看分享
2.1 外部分享查看
- 无密码访问
无密码访问时,可以直接打开链接并查看文档,但只有查看权限,无法修改。
 无密码访问
无密码访问
- 有密码访问
选择有密码访问时,被分享人需要输入密码才可以访问。
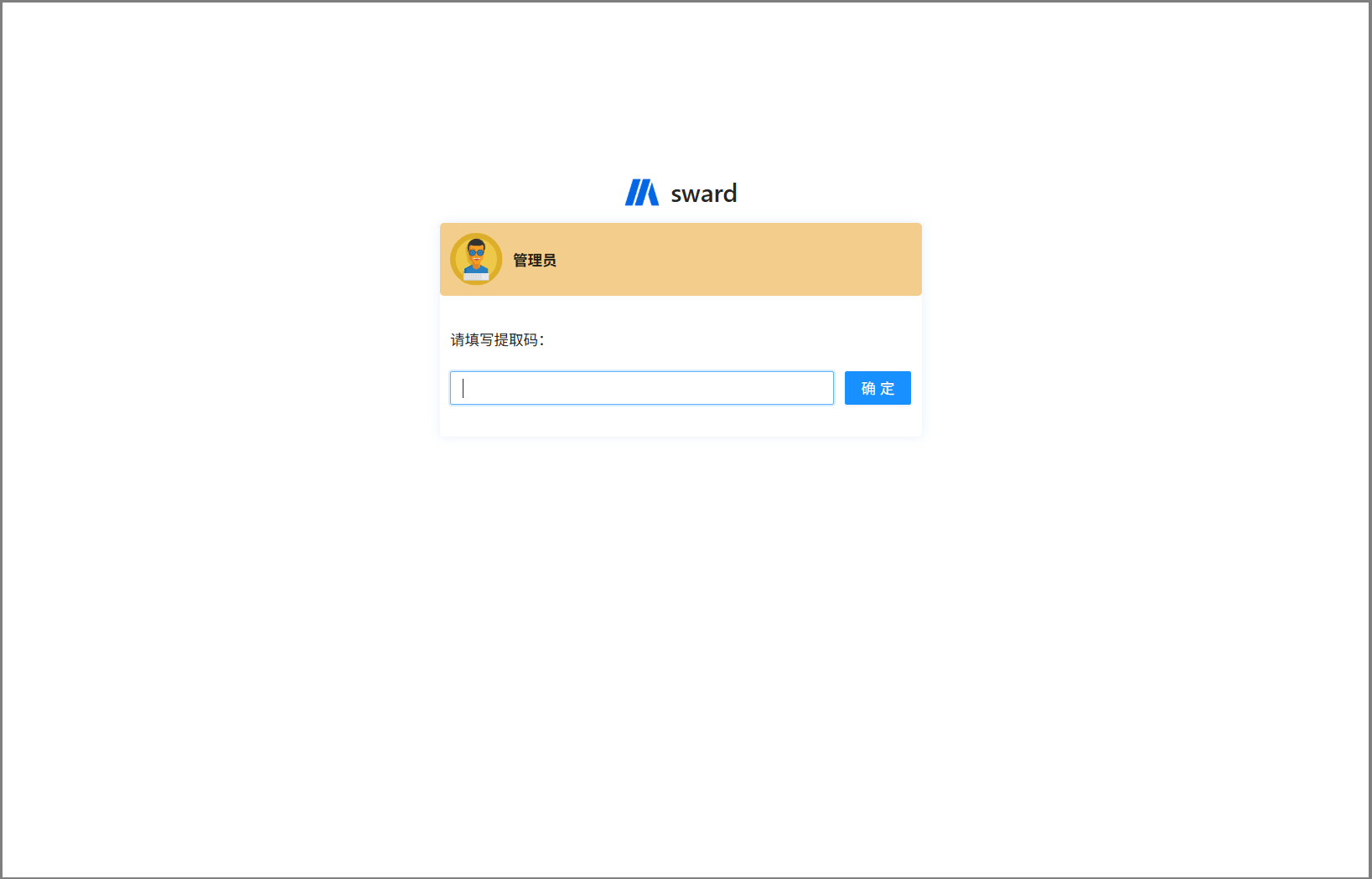 有密码访问
有密码访问
2.2 知识库内分享查看
- 访问人访问
打开链接人员为访问人时,直接显示文档内容的,但只能查看无法编辑
 访问人访问
访问人访问
- 非访问人访问
打开链接人员为非访问人时,会提示没有权限
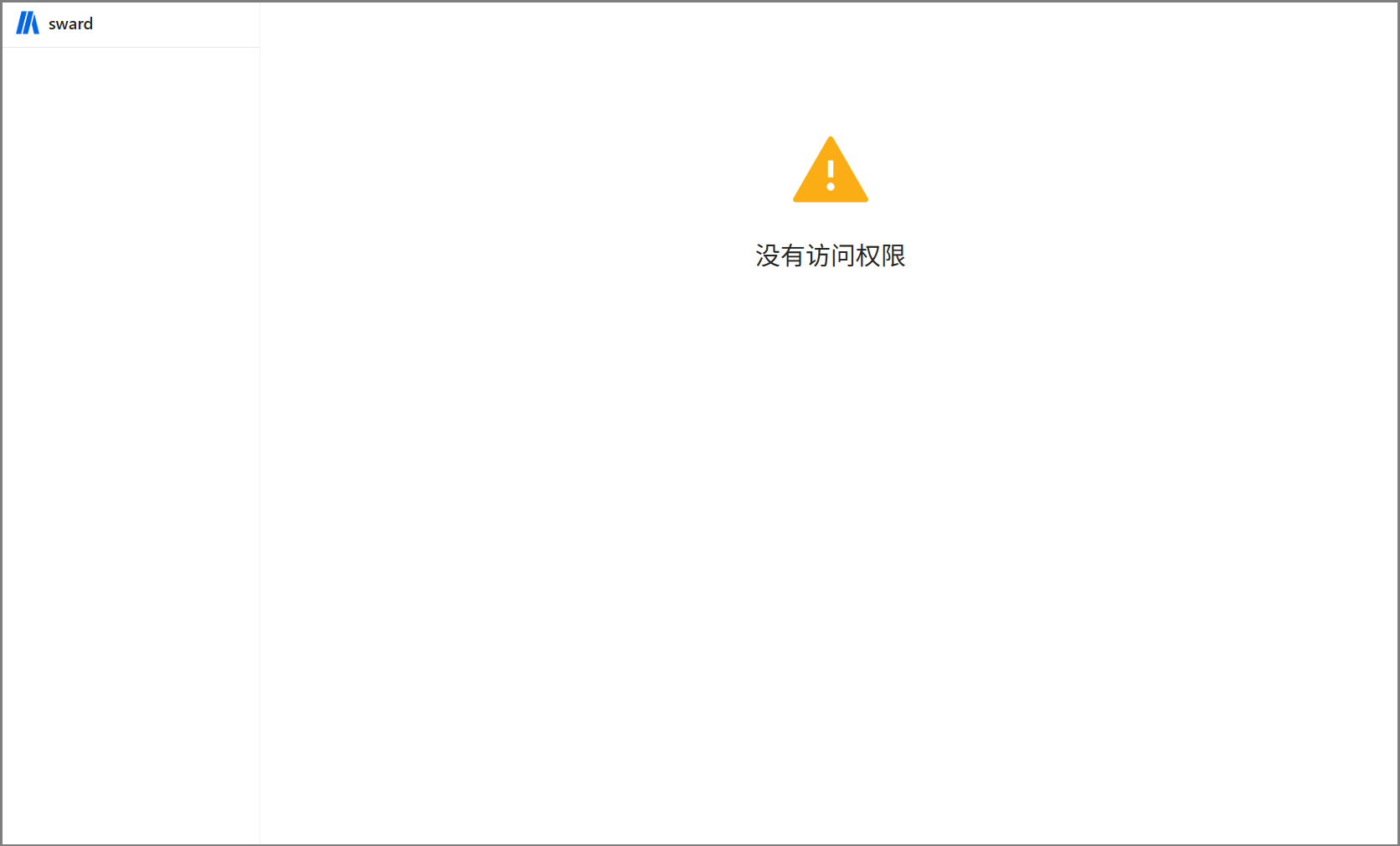 非访问人访问
非访问人访问
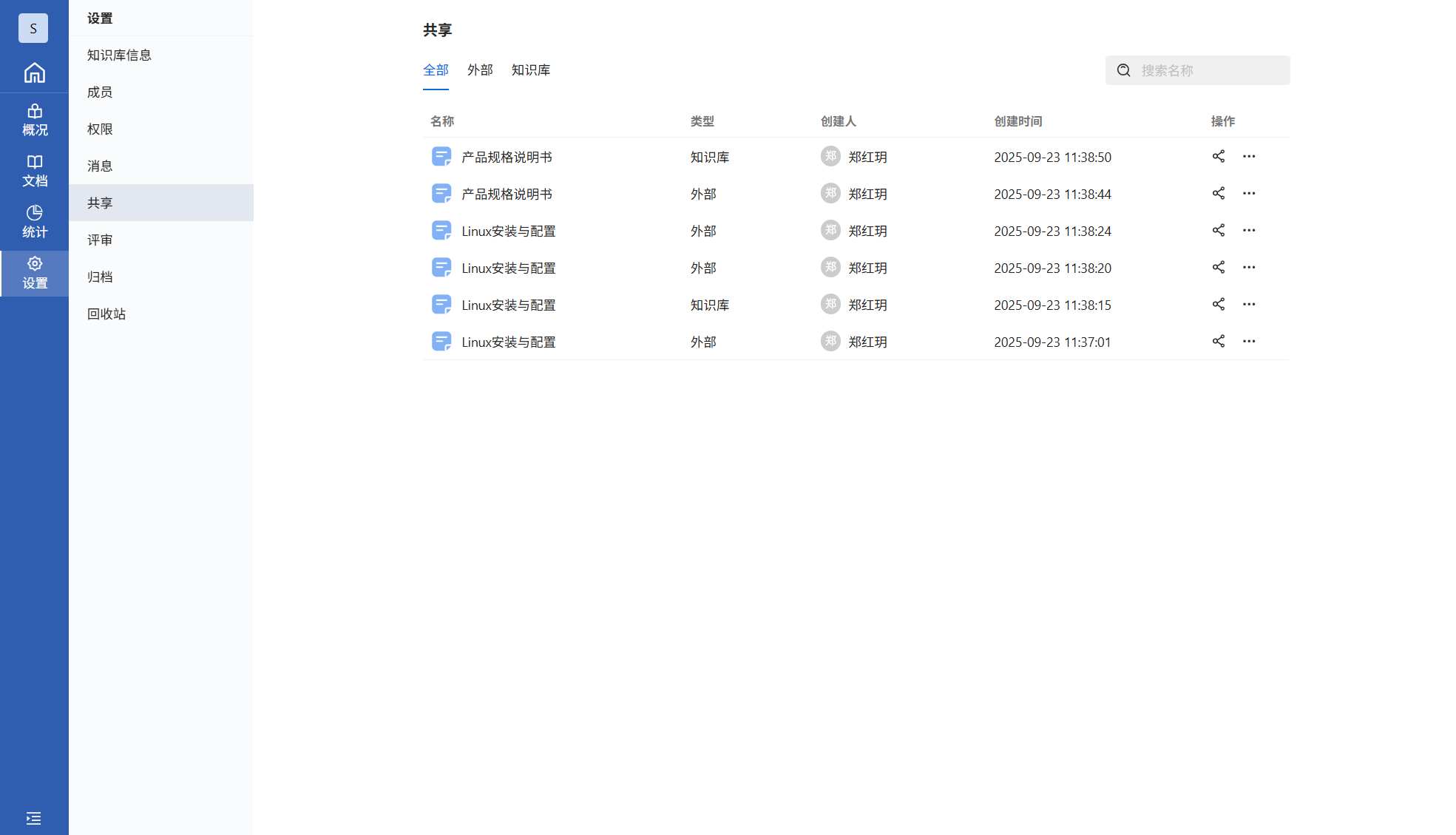
3、分享记录
每一次分享都会生成一条分享记录,记录在知识库设置->共享页面。

















 1084
1084

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









